shapethefuture
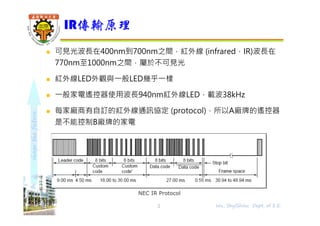
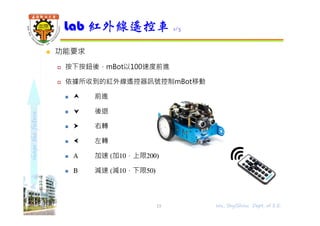
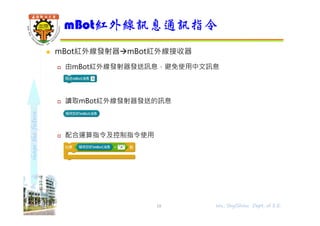
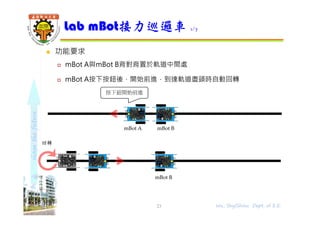
功能要求
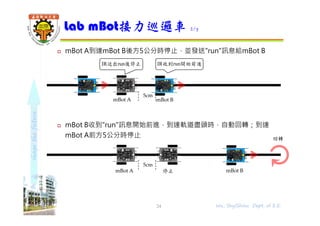
mBotA與mBot B背對背置於軌道中間處
mBot A按下按鈕後,開始前進,到達軌道盡頭時自動回轉
Lab mBot接力巡邏車 1/7
23
回轉
mBot A mBot B
按下鈕開始前進
mBot B
Wu, ShyiShiou Dept. of E.E.
24.
shapethefuture
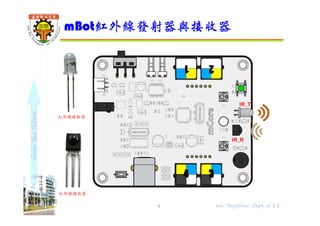
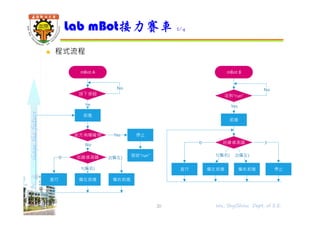
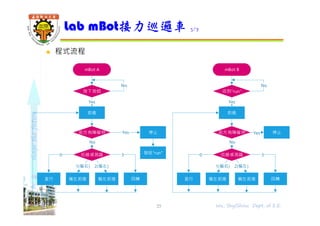
mBot A到達mBotB後方5公分時停止,並發送"run"訊息給mBot B
mBot B收到"run"訊息開始前進,到達軌道盡頭時,自動回轉;到達
mBot A前方5公分時停止
Lab mBot接力巡邏車 2/7
24
mBot B
5cm
IR送出run後停止 IR收到run開始前進
停止mBot A mBot B
5cm
回轉
mBot A
Wu, ShyiShiou Dept. of E.E.
25.
shapethefuture
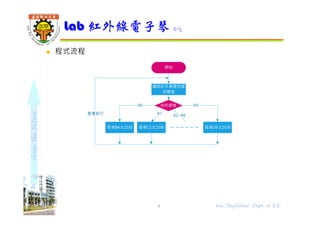
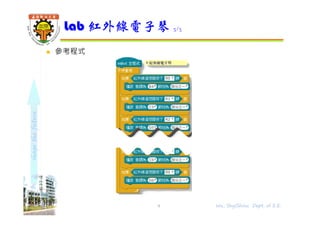
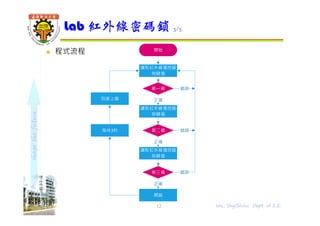
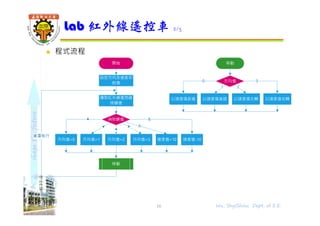
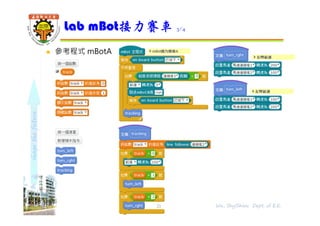
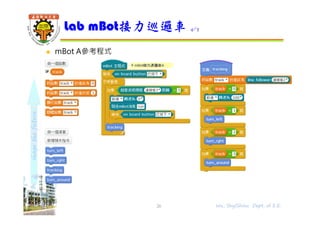
程式流程
Lab mBot接力巡邏車3/7
25 Wu, ShyiShiou Dept. of E.E.
mBot A
直行
No
巡線感測器0
偏左前進
1(偏右)
3
前方有障礙物 停止
發送"run"
Yes
回轉
按下按鈕
No
Yes
前進
偏左前進
2(偏左)
mBot B
直行
No
巡線感測器0
偏左前進
1(偏右)
3
前方有障礙物 停止Yes
回轉
收到"run"
No
Yes
前進
偏左前進
2(偏左)