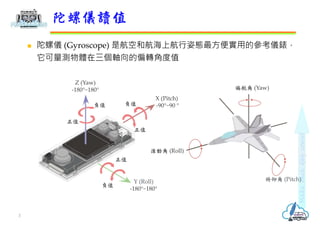
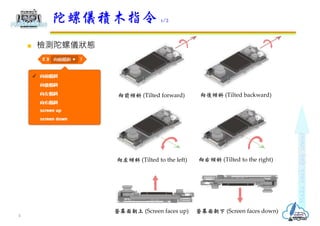
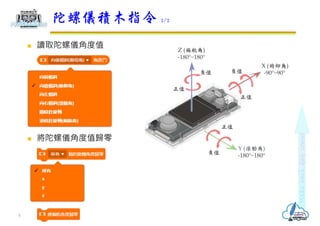
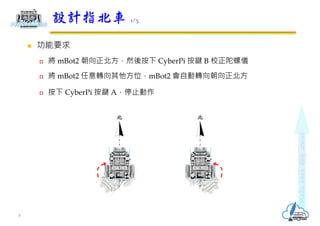
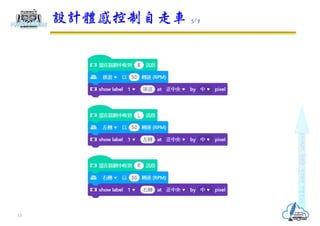
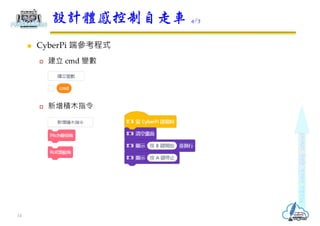
本文件介绍了陀螺仪和3轴加速度计在cyberpi平台上的应用,涉及其基本工作原理、指令、及如何设计和控制自走车。文中包含了对陀螺仪的角度测量、状态检测和校正方法的详细说明,以及通过加速度计实现的运动控制功能。最后,提供了参考程序及功能要求,帮助用户进行有效的编程和实验。