Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
吳錫修 (ShyiShiou Wu)
PDF, PPTX
2,614 views
mBot教學(4) - 移動控制
AI-enhanced description
该文档主要讨论直流马达的工作原理和控制方法,包括速度和方向的调整。内容涵盖mbot的移动控制指令、转向应用及相关实验练习方案。最后总结了复习要点,包括马达正反转和速度控制原理。
Software
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 28
2
/ 28
3
/ 28
4
/ 28
5
/ 28
6
/ 28
7
/ 28
8
/ 28
Most read
9
/ 28
10
/ 28
11
/ 28
Most read
12
/ 28
13
/ 28
14
/ 28
15
/ 28
16
/ 28
17
/ 28
18
/ 28
19
/ 28
Most read
20
/ 28
21
/ 28
22
/ 28
23
/ 28
24
/ 28
25
/ 28
26
/ 28
27
/ 28
28
/ 28
More Related Content
PDF
mBot 教學2 mBlock積木式設計程式
by
吳錫修 (ShyiShiou Wu)
PDF
mBot 教學4 移動控制
by
吳錫修 (ShyiShiou Wu)
PDF
2017 探奇 mBot mblock 機器人齊步走 15小時課程講義 v7
by
信仁 邱
PDF
mBot 教學8 巡跡控制應用
by
吳錫修 (ShyiShiou Wu)
PDF
mBot 教學1 組裝與測試
by
吳錫修 (ShyiShiou Wu)
PDF
mBot 教學6 光感測器與LED應用
by
吳錫修 (ShyiShiou Wu)
PDF
Mbot教學(1b) mBot初體驗
by
吳錫修 (ShyiShiou Wu)
PDF
mBot 教學3 開發mBot應用程式
by
吳錫修 (ShyiShiou Wu)
mBot 教學2 mBlock積木式設計程式
by
吳錫修 (ShyiShiou Wu)
mBot 教學4 移動控制
by
吳錫修 (ShyiShiou Wu)
2017 探奇 mBot mblock 機器人齊步走 15小時課程講義 v7
by
信仁 邱
mBot 教學8 巡跡控制應用
by
吳錫修 (ShyiShiou Wu)
mBot 教學1 組裝與測試
by
吳錫修 (ShyiShiou Wu)
mBot 教學6 光感測器與LED應用
by
吳錫修 (ShyiShiou Wu)
Mbot教學(1b) mBot初體驗
by
吳錫修 (ShyiShiou Wu)
mBot 教學3 開發mBot應用程式
by
吳錫修 (ShyiShiou Wu)
What's hot
PDF
mBot 教學10 藍牙控制應用
by
吳錫修 (ShyiShiou Wu)
PDF
mbot2.0教學-使用makeblock雲服務.pdf
by
吳錫修 (ShyiShiou Wu)
PDF
mBlock積木式設計程式
by
吳錫修 (ShyiShiou Wu)
PDF
mbot2.0教學-組裝與測試.pdf
by
吳錫修 (ShyiShiou Wu)
PDF
mbot2.0教學-超音波感測應用.pdf
by
吳錫修 (ShyiShiou Wu)
PDF
mBot教學(5) - 超音波感測應用
by
吳錫修 (ShyiShiou Wu)
PDF
mBot 教學5 超音波感測應用
by
吳錫修 (ShyiShiou Wu)
PDF
mBot教學(7)- 聲光控制應用
by
吳錫修 (ShyiShiou Wu)
PDF
mBot教學(3) - 開發mBot應用程式
by
吳錫修 (ShyiShiou Wu)
PDF
mBot教學(8) - 巡線控制應用
by
吳錫修 (ShyiShiou Wu)
PDF
mBot教學(1) - mBot初體驗
by
吳錫修 (ShyiShiou Wu)
PDF
機器人齊步走 V4 m_bot_mblock
by
信仁 邱
PDF
mbot2.0教學-mblock5開發mBot 2.0應用程式.pdf
by
吳錫修 (ShyiShiou Wu)
PDF
mBot教學(9)- 紅外線傳輸應用
by
吳錫修 (ShyiShiou Wu)
PDF
教學(10) 藍牙控制應用
by
吳錫修 (ShyiShiou Wu)
PDF
mbot2.0教學-移動控制.pdf
by
吳錫修 (ShyiShiou Wu)
PDF
mBot 教學7 聲光控制應用
by
吳錫修 (ShyiShiou Wu)
PDF
mbot2.0教學-四路顏色感測器應用.pdf
by
吳錫修 (ShyiShiou Wu)
PDF
mBot教學(2)-mBlock積木式程式設計
by
吳錫修 (ShyiShiou Wu)
PDF
mBot 教學9 紅外線傳輸應用
by
吳錫修 (ShyiShiou Wu)
mBot 教學10 藍牙控制應用
by
吳錫修 (ShyiShiou Wu)
mbot2.0教學-使用makeblock雲服務.pdf
by
吳錫修 (ShyiShiou Wu)
mBlock積木式設計程式
by
吳錫修 (ShyiShiou Wu)
mbot2.0教學-組裝與測試.pdf
by
吳錫修 (ShyiShiou Wu)
mbot2.0教學-超音波感測應用.pdf
by
吳錫修 (ShyiShiou Wu)
mBot教學(5) - 超音波感測應用
by
吳錫修 (ShyiShiou Wu)
mBot 教學5 超音波感測應用
by
吳錫修 (ShyiShiou Wu)
mBot教學(7)- 聲光控制應用
by
吳錫修 (ShyiShiou Wu)
mBot教學(3) - 開發mBot應用程式
by
吳錫修 (ShyiShiou Wu)
mBot教學(8) - 巡線控制應用
by
吳錫修 (ShyiShiou Wu)
mBot教學(1) - mBot初體驗
by
吳錫修 (ShyiShiou Wu)
機器人齊步走 V4 m_bot_mblock
by
信仁 邱
mbot2.0教學-mblock5開發mBot 2.0應用程式.pdf
by
吳錫修 (ShyiShiou Wu)
mBot教學(9)- 紅外線傳輸應用
by
吳錫修 (ShyiShiou Wu)
教學(10) 藍牙控制應用
by
吳錫修 (ShyiShiou Wu)
mbot2.0教學-移動控制.pdf
by
吳錫修 (ShyiShiou Wu)
mBot 教學7 聲光控制應用
by
吳錫修 (ShyiShiou Wu)
mbot2.0教學-四路顏色感測器應用.pdf
by
吳錫修 (ShyiShiou Wu)
mBot教學(2)-mBlock積木式程式設計
by
吳錫修 (ShyiShiou Wu)
mBot 教學9 紅外線傳輸應用
by
吳錫修 (ShyiShiou Wu)
Similar to mBot教學(4) - 移動控制
PDF
mBot組裝與測試
by
吳錫修 (ShyiShiou Wu)
PPT
馬達基本認識與 BLDC 驅動實驗
by
roboard
PPTX
公版教具元件感測器7-伺服馬達.pptx
by
ssuser9dbe5c
PPTX
Arduino 習作工坊 - Lesson 2 動力之夜
by
CAVEDU Education
PDF
#1247 Sensor and Controller Student book Chinese version-Part 1
by
Sandy Lu
PPT
FUNDAMNETOS DE ELECTROMAGENTISMO, REACTOR
by
MirkoIvanContrerasQu
PPTX
Thrd relase t
by
Ruei Ting Wang
PPTX
Arduino 習作工坊#2 - 動力之夜150114
by
CAVEDU Education
PDF
產品簡介 創盟電子 2015_v1.0c
by
Lee Leo
PDF
AMA 中級術科實作II
by
吳錫修 (ShyiShiou Wu)
PDF
Chapter 3 XBee無線遙控車
by
CAVEDU Education
PDF
AMA 中級術科實作 I
by
吳錫修 (ShyiShiou Wu)
PDF
Arduino工作坊 - 羅伯特幫我寫作業
by
Chih-Ta Wu
PDF
mBot藍牙控制
by
吳錫修 (ShyiShiou Wu)
PDF
AMA 中級術科實作IV
by
吳錫修 (ShyiShiou Wu)
PDF
2018 Week 13 Servo Motor
by
AkashaC1
PPTX
Cat vs Mini4WD ROBOT
by
Jack Wang
PDF
Mix Taiwan20170322邱浚豪-從零到有,反骨的硬體實踐術
by
Mix Taiwan
PDF
S4 a sensor board
by
吳錫修 (ShyiShiou Wu)
PDF
Cnc fablab
by
宗凡 楊
mBot組裝與測試
by
吳錫修 (ShyiShiou Wu)
馬達基本認識與 BLDC 驅動實驗
by
roboard
公版教具元件感測器7-伺服馬達.pptx
by
ssuser9dbe5c
Arduino 習作工坊 - Lesson 2 動力之夜
by
CAVEDU Education
#1247 Sensor and Controller Student book Chinese version-Part 1
by
Sandy Lu
FUNDAMNETOS DE ELECTROMAGENTISMO, REACTOR
by
MirkoIvanContrerasQu
Thrd relase t
by
Ruei Ting Wang
Arduino 習作工坊#2 - 動力之夜150114
by
CAVEDU Education
產品簡介 創盟電子 2015_v1.0c
by
Lee Leo
AMA 中級術科實作II
by
吳錫修 (ShyiShiou Wu)
Chapter 3 XBee無線遙控車
by
CAVEDU Education
AMA 中級術科實作 I
by
吳錫修 (ShyiShiou Wu)
Arduino工作坊 - 羅伯特幫我寫作業
by
Chih-Ta Wu
mBot藍牙控制
by
吳錫修 (ShyiShiou Wu)
AMA 中級術科實作IV
by
吳錫修 (ShyiShiou Wu)
2018 Week 13 Servo Motor
by
AkashaC1
Cat vs Mini4WD ROBOT
by
Jack Wang
Mix Taiwan20170322邱浚豪-從零到有,反骨的硬體實踐術
by
Mix Taiwan
S4 a sensor board
by
吳錫修 (ShyiShiou Wu)
Cnc fablab
by
宗凡 楊
More from 吳錫修 (ShyiShiou Wu)
PDF
使用Makeblock App學習mBot程式設計
by
吳錫修 (ShyiShiou Wu)
PDF
micro:bit LED顯示控制
by
吳錫修 (ShyiShiou Wu)
PDF
micro:bit開關控制應用
by
吳錫修 (ShyiShiou Wu)
PDF
micro:bit亮度感測應用
by
吳錫修 (ShyiShiou Wu)
PDF
Microbit 1 introduction
by
吳錫修 (ShyiShiou Wu)
PDF
Unity遊戲程式設計 - 2D Platformer遊戲
by
吳錫修 (ShyiShiou Wu)
PDF
Unity遊戲程式設計 - 2D移動與碰撞處理II
by
吳錫修 (ShyiShiou Wu)
PDF
Unity遊戲設計- 2D動畫製作及應用
by
吳錫修 (ShyiShiou Wu)
PDF
nodeMCU IOT教學03 - NodeMCU導論
by
吳錫修 (ShyiShiou Wu)
PDF
Vuforia AR影片程式設計
by
吳錫修 (ShyiShiou Wu)
PDF
Unity遊戲程式設計 - 2D運動與碰撞處理I
by
吳錫修 (ShyiShiou Wu)
PDF
Arduino overview
by
吳錫修 (ShyiShiou Wu)
PDF
Arduino程式除錯
by
吳錫修 (ShyiShiou Wu)
PDF
Python與Ardinio整合應用
by
吳錫修 (ShyiShiou Wu)
PDF
Vuforia AR 應用程式設計入門
by
吳錫修 (ShyiShiou Wu)
PDF
Vuforia AR 應用程式準備作業
by
吳錫修 (ShyiShiou Wu)
PDF
Vuforia AR 同時追踨多張辨識圖
by
吳錫修 (ShyiShiou Wu)
PDF
使用M部落App學習mBot程式設計
by
吳錫修 (ShyiShiou Wu)
PDF
IDE for micro:bit
by
吳錫修 (ShyiShiou Wu)
PDF
nodeMCU IOT教學02 - Lua語言
by
吳錫修 (ShyiShiou Wu)
使用Makeblock App學習mBot程式設計
by
吳錫修 (ShyiShiou Wu)
micro:bit LED顯示控制
by
吳錫修 (ShyiShiou Wu)
micro:bit開關控制應用
by
吳錫修 (ShyiShiou Wu)
micro:bit亮度感測應用
by
吳錫修 (ShyiShiou Wu)
Microbit 1 introduction
by
吳錫修 (ShyiShiou Wu)
Unity遊戲程式設計 - 2D Platformer遊戲
by
吳錫修 (ShyiShiou Wu)
Unity遊戲程式設計 - 2D移動與碰撞處理II
by
吳錫修 (ShyiShiou Wu)
Unity遊戲設計- 2D動畫製作及應用
by
吳錫修 (ShyiShiou Wu)
nodeMCU IOT教學03 - NodeMCU導論
by
吳錫修 (ShyiShiou Wu)
Vuforia AR影片程式設計
by
吳錫修 (ShyiShiou Wu)
Unity遊戲程式設計 - 2D運動與碰撞處理I
by
吳錫修 (ShyiShiou Wu)
Arduino overview
by
吳錫修 (ShyiShiou Wu)
Arduino程式除錯
by
吳錫修 (ShyiShiou Wu)
Python與Ardinio整合應用
by
吳錫修 (ShyiShiou Wu)
Vuforia AR 應用程式設計入門
by
吳錫修 (ShyiShiou Wu)
Vuforia AR 應用程式準備作業
by
吳錫修 (ShyiShiou Wu)
Vuforia AR 同時追踨多張辨識圖
by
吳錫修 (ShyiShiou Wu)
使用M部落App學習mBot程式設計
by
吳錫修 (ShyiShiou Wu)
IDE for micro:bit
by
吳錫修 (ShyiShiou Wu)
nodeMCU IOT教學02 - Lua語言
by
吳錫修 (ShyiShiou Wu)
mBot教學(4) - 移動控制
1.
電子工程系車用電子與資訊組 教學(4) 移動控制 吳錫修 February 11, 2018 直流馬達方向與速度控制原理、mBot移動控制指令、 前後移動控制應用、轉彎角度控制應用、轉彎行進控 制應用
2.
shapethefuture 安培右手定則 用右手握住通電螺線管,四指指向電流方向,則大拇指端是磁場N極 直流馬達原理 2
Wu, ShyiShiou Dept. of E.E. 電流方向 磁場方向 NS 同性相斥,異性相吸 運動貫性,轉子繼續轉動 同性相斥,異性相吸 電流反向 運動貫性,轉子繼續轉動 電流反向
3.
shapethefuture CPU散熱風扇 USB風扇
遙控車 四軸飛行器 生活科技應用實例 3 Wu, ShyiShiou Dept. of E.E.
4.
shapethefuture 直流馬達 齒輪箱 (減速&轉向) 減速直流馬達 額定電壓:直流6V
空載轉速:200RPM (revolutions per minute)±10% 齒輪比1:48 降低速度、增加扭力 mBot直流馬達模組 1/2 4 Wu, ShyiShiou Dept. of E.E. 齒輪箱內部結構
5.
shapethefuture 預設左側馬達連接到mCore馬達連接埠1,右側馬達連接到mCore 馬達連接埠2 mBot直流馬達模組 2/2 5
Wu, ShyiShiou Dept. of E.E. 右側 左側
6.
shapethefuture 正轉 反轉 直流馬達正反轉控制原理 6
Wu, ShyiShiou Dept. of E.E. VDD OUT1 OUT2 IN1 (L) IN2 (H) M VDD OUT1 OUT2 IN1 (H) IN2 (L) M
7.
shapethefuture 使用1KHz PWM
(pulse width modulation) 調整DC馬達速度,但 無法精準控制轉速 直流馬達速度控制原理 7 Wu, ShyiShiou Dept. of E.E. 最高速 靜止 低速
8.
shapethefuture mBot輸子直徑6.5cm,輪子轉⼀圏6.5*3.14=20.41cm 左右馬達同步控制指令
左轉、右轉為原地旋轉方式 mBot靜止時,需要較大啟動力矩,無法直接低速前進,可先以高速 啟動後再降速 速度及方向控制 1/5 8 Wu, ShyiShiou Dept. of E.E. 正轉最高速 靜止 反轉最高速
9.
shapethefuture 左右馬達個別控制指令 mCore馬達連接埠1接左側馬達,馬達連接埠2接右側馬達
控制指令 速度及方向控制 2/5 9 Wu, ShyiShiou Dept. of E.E.
10.
shapethefuture 前進:左右馬達轉速相同且大於0 等同 後退:左右馬達轉速相同且小於0 等同
停止:左右馬達轉速同時為0 等同 速度及方向控制 3/5 10 Wu, ShyiShiou Dept. of E.E.
11.
shapethefuture 行進間右轉:左側馬達轉速>右側馬達轉速 以右輪為支點右轉
以左輪為支點右轉 原地右旋轉 速度及方向控制 4/5 11 Wu, ShyiShiou Dept. of E.E.
12.
shapethefuture 行進間左轉:左側馬達轉速<右側馬達轉速 以左輪為支點左轉
以右輪為支點左轉 原地左旋轉 速度及方向控制 5/5 12 Wu, ShyiShiou Dept. of E.E.
13.
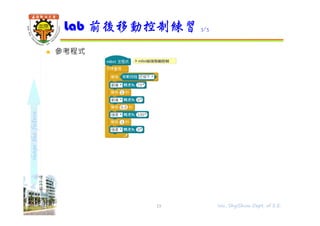
shapethefuture 功能要求 按下按鈕後,mBot以75速度前進2秒,停止0.5秒後再以150速度後退1 秒,之後停止
觀察車子移動情形 車子保持直線前進嗎? 為什麼? 車子有回到原點嗎? 為什麼? Lab 前後移動控制練習 1/3 13 Wu, ShyiShiou Dept. of E.E.
14.
shapethefuture 程式流程 Lab 前後移動控制練習
2/3 14 Wu, ShyiShiou Dept. of E.E.
15.
shapethefuture 參考程式 Lab 前後移動控制練習
3/3 15 Wu, ShyiShiou Dept. of E.E.
16.
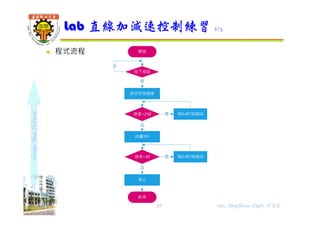
shapethefuture 功能要求 按下按鈕後,mBot速度由50開始,每0.4秒加速20至250,持續1秒後, 每0.4秒減速20至50,之後停止 Lab
直線加減速控制練習 1/3 16 Wu, ShyiShiou Dept. of E.E.
17.
shapethefuture 程式流程 Lab 直線加減速控制練習
2/3 17 Wu, ShyiShiou Dept. of E.E.
18.
shapethefuture 參考程式 建立speed變數 Lab
直線加減速控制練習 3/3 18 Wu, ShyiShiou Dept. of E.E.
19.
shapethefuture 功能要求 按下按鈕後,讓mBot以100速度繞正方形路徑⼀圈
注意事項:需要測試並調整等待 (delay) 時間以控制旋轉角度 Lab 轉彎角度控制練習 1/3 19 Wu, ShyiShiou Dept. of E.E.
20.
shapethefuture 程式流程 Lab 轉彎角度控制練習
2/3 20 Wu, ShyiShiou Dept. of E.E.
21.
shapethefuture 參考程式 Lab 轉彎角度控制練習
3/3 21 Wu, ShyiShiou Dept. of E.E. 須調校延遲時間
22.
shapethefuture 功能要求 按下按鈕後,讓mBot順時針繞圓圏行進 Lab
轉彎角度控制練習II 1/3 22 Wu, ShyiShiou Dept. of E.E.
23.
shapethefuture 程式流程 Lab 轉彎角度控制練習II
2/3 23 Wu, ShyiShiou Dept. of E.E. 開始 設左馬達速度 設右馬達速度 按下按鈕 是 否 重覆執行
24.
shapethefuture 參考程式 左右馬達速度差愈大,繞圏半徑愈小 Lab
轉彎角度控制練習II 3/3 24 Wu, ShyiShiou Dept. of E.E.
25.
shapethefuture 功能要求 按下按鈕後,利用左右馬達速度差方式讓mBot以S形前進 Lab轉彎行進控制練習
1/3 25 Wu, ShyiShiou Dept. of E.E.
26.
shapethefuture 程式流程 Lab 轉彎行進控制練習
2/3 26 Wu, ShyiShiou Dept. of E.E.
27.
shapethefuture 參考程式 左右馬達速度差愈大,S型彎度愈大 Lab
轉彎行進控制練習 3/3 27 Wu, ShyiShiou Dept. of E.E.
28.
shapethefuture 直流馬達正轉、反轉原理 直流馬達速度控制原理
mBot馬達控制指令 復習 28 Wu, ShyiShiou Dept. of E.E.
Download