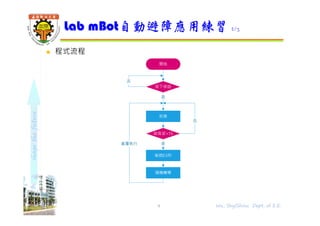
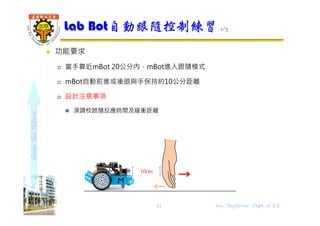
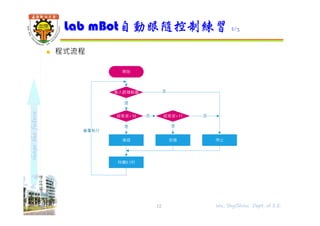
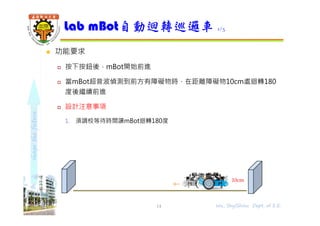
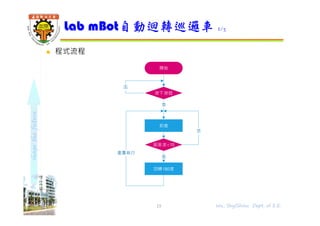
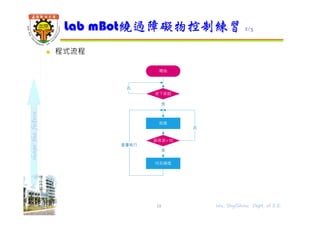
本文介绍了超音波的基础知识及其在mbot中的应用,涵盖了超音波测距原理、mbot超音波控制指令及相关应用实例。文中详细阐述了如何使用mbot进行自动避障、跟随控制、自动巡逻和绕过障碍物等功能。超音波技术在生活科技中的应用展现了其在机器人领域的实用性和灵活性。