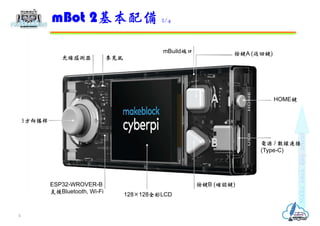
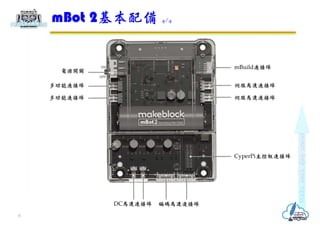
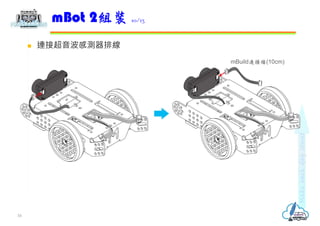
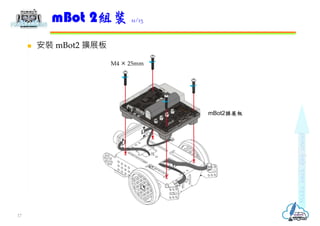
本文件详细介绍了mbot2的组装与测试步骤,包括所需配件和主要部件的功能。文档中列出了具体的安装步骤以及测试程序的使用方法,确保用户能够顺利组装和测试mbot2。文件内容紧凑,适合初学者和需要参考的用户。