Downloaded 1,201 times



![3. u+(v+w) = (x1,y1)+[(x2,y2) +(x3,y3)]
= (x1,y1)+(x2+x3+1, y2+y3+1)
= [x1+ (x2+x3+1)+1 , y1+(y2+y1+1)+1)
= [(x1+ x2+1)+x3+1 , (y1+y2+1)+y3+1)]
= (x1+x2+1, y1+y2+1)+(x3+y3)
= (u+v)+w
Hence, vector addition is associative.
4. Let (a,b) be in object in V such that (a,b)+u=u
(a,b) +(x1,y1)=(x1,y1)
(a+x1+1,b1+y1+1) = (x1,y1)
a= -1 , b=-1
Hence, (-1,-1) is zero vector in V.
5. Let (a,b) be in object in V such that (a,b)+u=(-1,-1)
(a,b)+(x1,y1)=(-1,-1)
(x1+a+1,y1+b+1)=(1,-1)
a= -x1-2 , b = -y1-2
Hence, (-x1-2,y1-2) is the negative of u in V](https://image.slidesharecdn.com/vectorspace-161202164139/85/Vector-space-6-320.jpg)












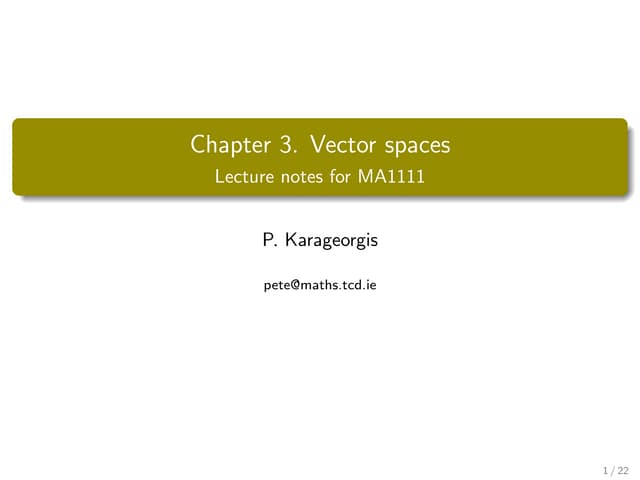
![Change of basis problem
You were given the coordinates of a vector relative to one
basis B and were asked to find the coordinates relative to
another basis B'.
Transition matrix from B' to B:
V
BB nn
spacevectorafor
basestwobe}...,,{nda},...,,{etL 2121 uuuuuu
BB P ][][hent vv BBnBB
v,...,, 1 uuu 2
BnBB
P uuu 2
...,,,1
where
is called the transition matrix from B' to B
If [v]B is the coordinate matrix of v relative to B
[v]B‘ is the coordinate matrix of v relative to B'](https://image.slidesharecdn.com/vectorspace-161202164139/85/Vector-space-21-320.jpg)

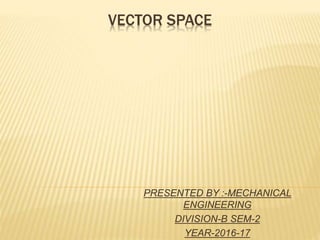
![B={(–3, 2), (4,–2)} and B' ={(–1, 2), (2,–2)} are two
bases for R
2
(a) Find the transition matrix from B' to B.
(b)
(c) Find the transition matrix from B to B' .
BB ][find,
2
1
][Let ' vv
Ex : (Finding a transition matrix)
Sol:
22
21
22
43
12
23
10
01
G.J.E.
B B' I P
12
23
P (the transition matrix from B' to B)
(a)
Sol:
22
21
22
43
G.J.E.
B B'
(a)](https://image.slidesharecdn.com/vectorspace-161202164139/85/Vector-space-23-320.jpg)
![
0
1
2
1
12
23
][][
2
1
][ BBB
P vvv
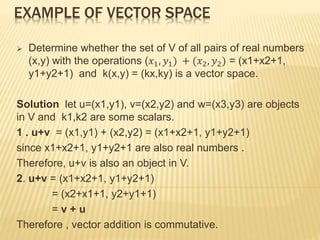
(b)
22
43
22
21
32
21
10
01
G.J.E.
B' B I P
-1
(the transition matrix from B to B')
32
211
P
Check: 2
1
10
01
32
21
12
23
IPP
)2,3()2,4)(0()2,3)(1(
0
1
][
)2,3()2,2)(2()2,1)(1(
2
1
][
:Check
vv
vv
B
B
(c)](https://image.slidesharecdn.com/vectorspace-161202164139/85/Vector-space-24-320.jpg)




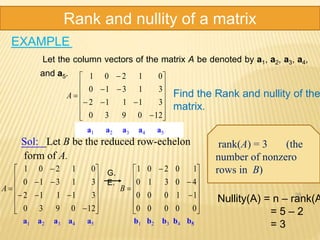
![Find the coordinate matrix of x=(1, 2, –1) in R3 relative to
the (nonstandard) basis
B ' = {u1, u2, u3}={(1, 0, 1), (0, – 1, 2), (2, 3, – 5)}
Sol:
2100
8010
5001
1521
2310
1201
E.G.J.
)5,3,2()2,1,0()1,0,1()1,2,1( 321332211
cccccc uuux
1
2
1
521
310
201
i.e.
152
23
12
3
2
1
321
32
31
c
c
c
ccc
cc
cc
2
8
5
][ B
x
Finding a coordinate matrix relative to a
nonstandard basis](https://image.slidesharecdn.com/vectorspace-161202164139/85/Vector-space-29-320.jpg)








The document discusses vector spaces and related linear algebra concepts. It defines vector spaces and lists the axioms that must be satisfied. Examples of vector spaces include the set of all pairs of real numbers and the space of 2x2 symmetric matrices. The document also discusses subspaces, linear combinations, span, basis, dimension, row space, column space, null space, rank, nullity, and change of basis. It provides examples and explanations of these fundamental linear algebra topics.