The document summarizes key concepts in reinforcement learning:
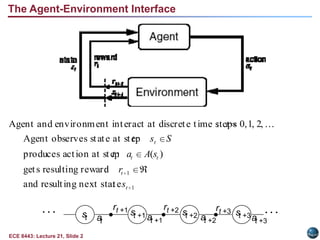
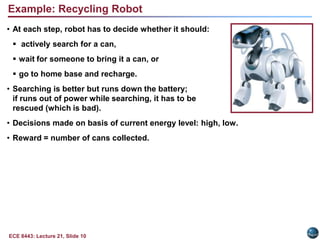
- Agent-environment interaction is modeled as states, actions, and rewards
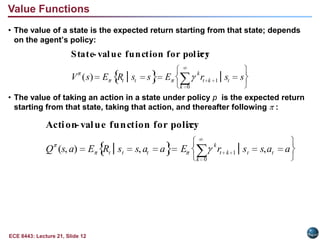
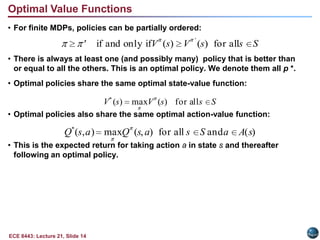
- A policy is a rule for selecting actions in each state
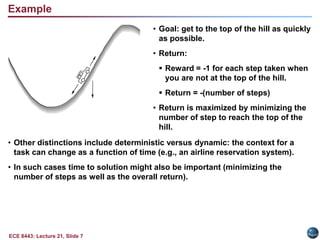
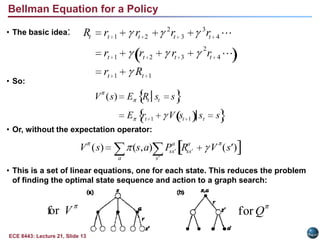
- The return is the total discounted future reward an agent aims to maximize
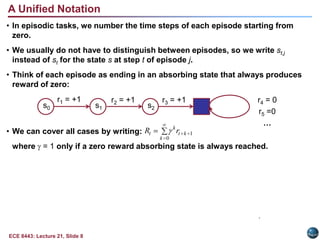
- Tasks can be episodic or continuing
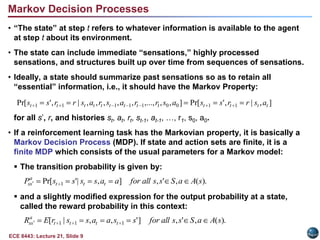
- The Markov property means the future depends only on the present state
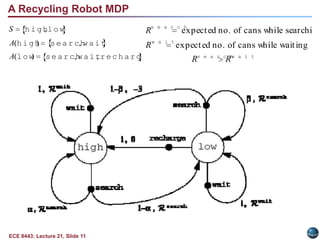
- The agent-environment framework can be modeled as a Markov decision process