The document discusses reinforcement learning and its key concepts. It covers defining the reinforcement learning problem through reward maximization and Bellman's equation. It then discusses learning methods like Monte Carlo, temporal difference learning, and Q-learning. It also covers improvements like the importance of exploration versus exploitation and eligibility traces for accelerated learning.
![Defining the Problem
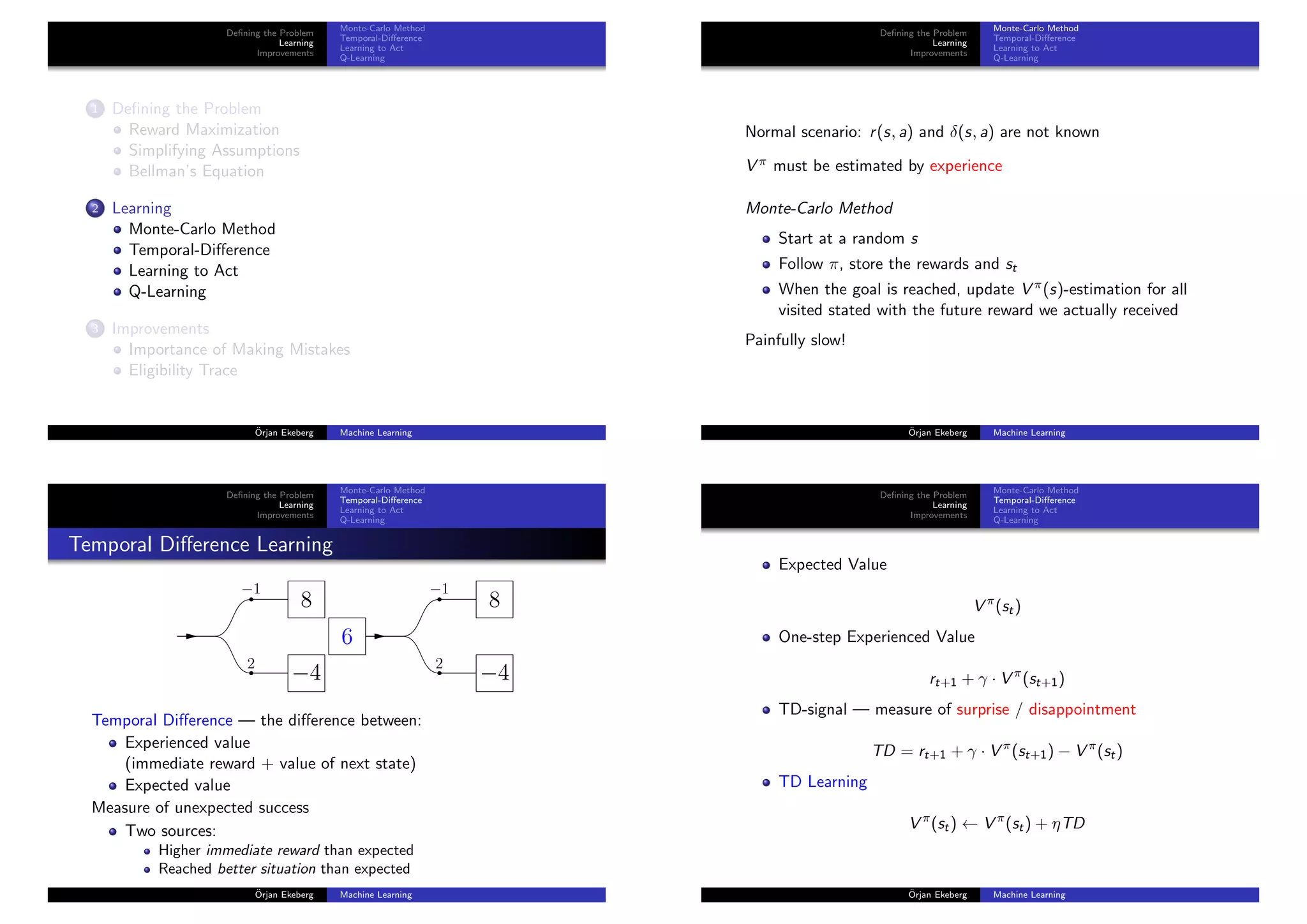
Learning
Improvements
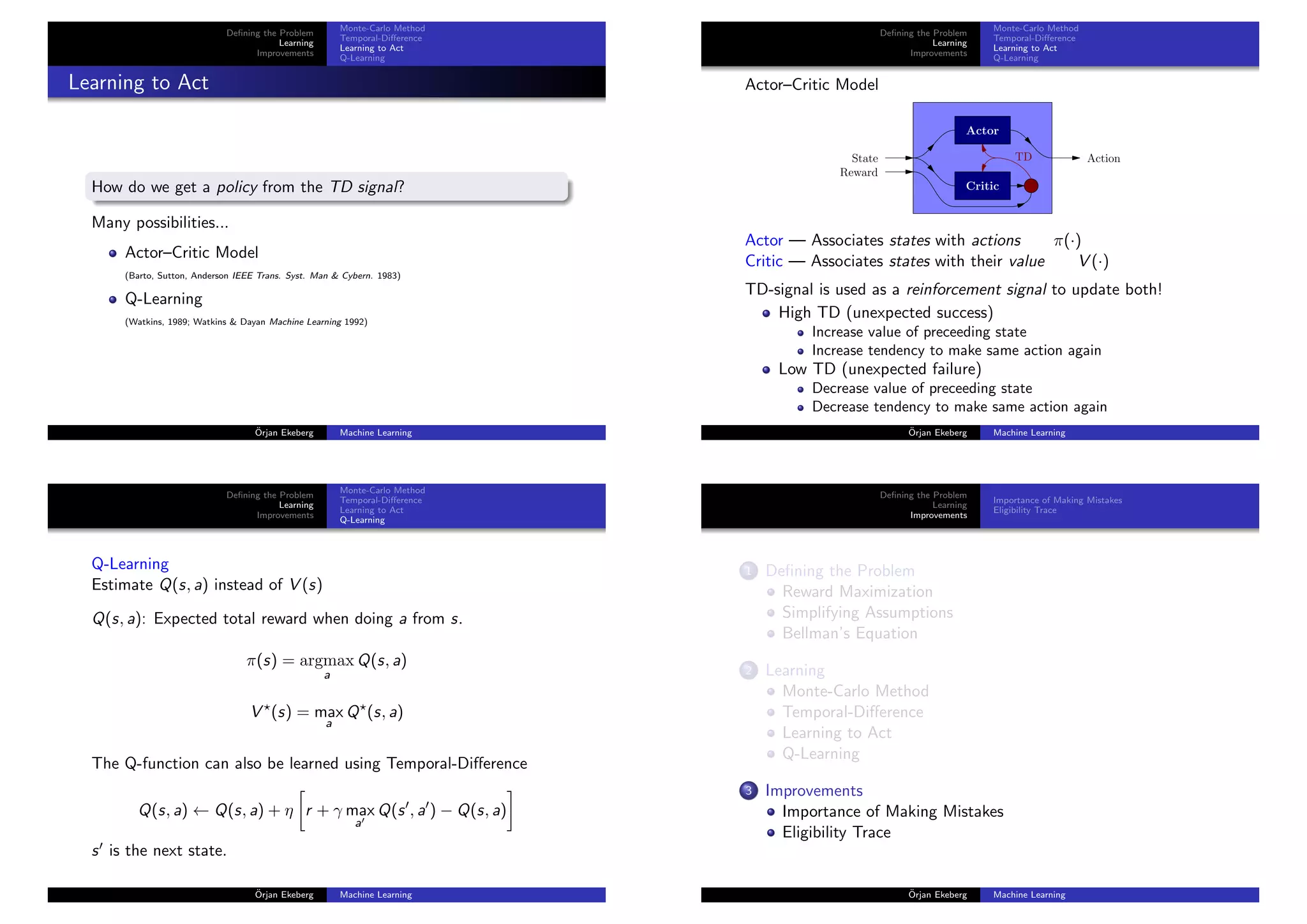
Importance of Making Mistakes
Eligibility Trace
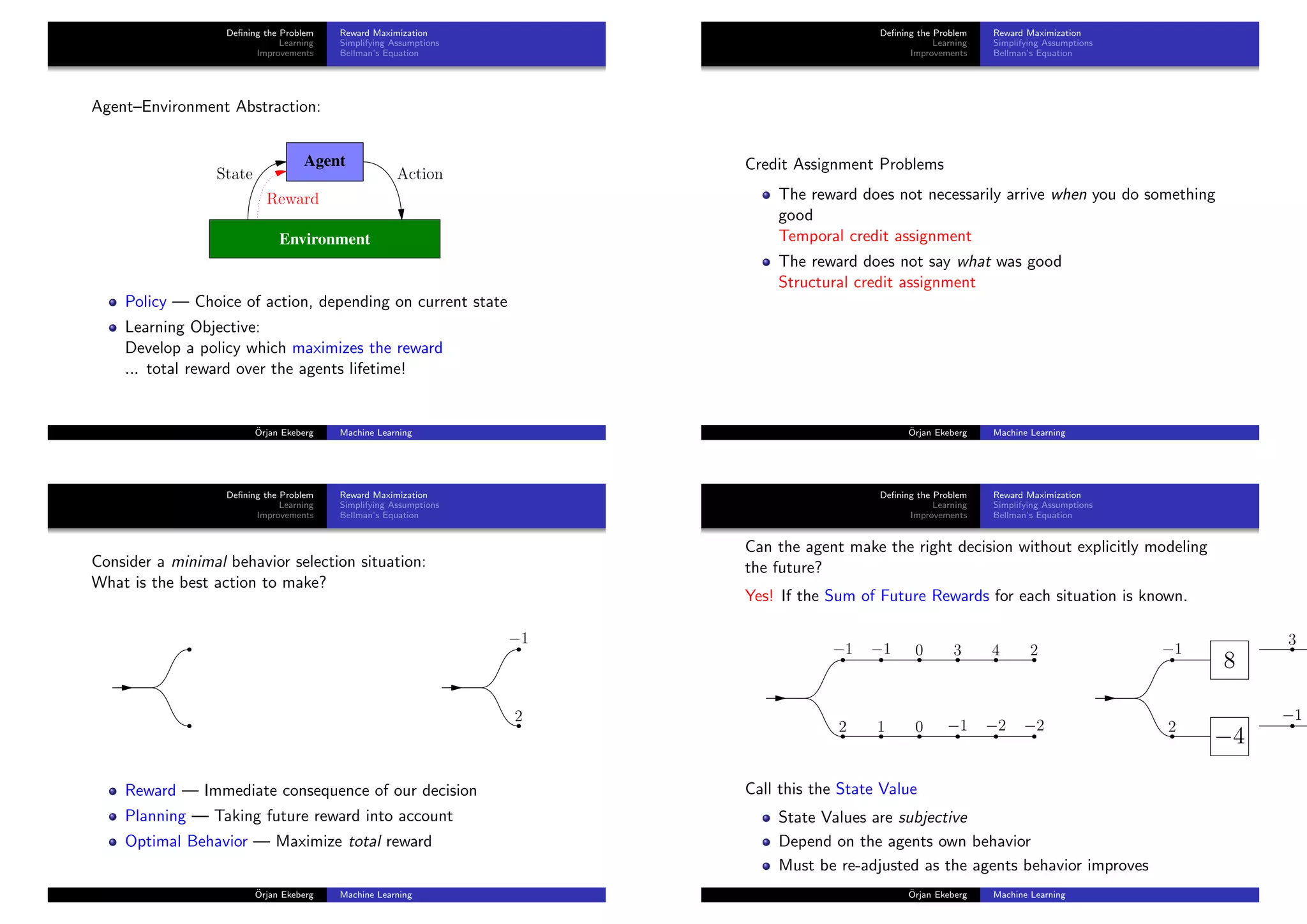
What do we do when...
The environment is not deterministic
The environment is not fully observable
There are way too many states
The states are not discrete
The agent is acting in continuous time
¨Orjan Ekeberg Machine Learning
Defining the Problem
Learning
Improvements
Importance of Making Mistakes
Eligibility Trace
The Exploration–Exploitation dilemma
If an agent strictly follows a greedy policy based on the current
estimate of Q, learning is not guaranteed to converge to Q
Simple solution:
Use a policy which has a certain probability of ”making mistakes”
-greedy
Sometimes (with probability ) make a random action instead
of the one that seems best (greedy)
Softmax
Assign a probability to choose each action depending on how
good they seem
¨Orjan Ekeberg Machine Learning
Defining the Problem
Learning
Improvements
Importance of Making Mistakes
Eligibility Trace
Accelerated learning
Id´ea: TD updates can be used to improve not only the last state’s
value, but also states we have visited earlier.
∀s, a : Q(s, a) ← Q(s, a) + η [rt+1 + γQ(st+1, at+1) − Q(st, at)] · e
e is a remaining trace (eligibility trace) encoding how long ago we
were in s doing a.
Often denoted TD(λ) where λ is the time constant of the trace e
¨Orjan Ekeberg Machine Learning](https://image.slidesharecdn.com/09-rl-2x2-150823145810-lva1-app6891/75/Reinforcement-Learning-7-2048.jpg)
















































![[DSC Europe 25] Jim Sterne - Adopting Generative AI Capabilities Into the Ent...](https://cdn.slidesharecdn.com/ss_thumbnails/sxhpofuorcagxsaulkmt-3-251204082258-7e66bc48-thumbnail.jpg?width=640&height=640&fit=bounds)












![[DSC Europe 25] Dragan Vucic - Building the Learning Organization - How AI Tr...](https://cdn.slidesharecdn.com/ss_thumbnails/8brigo2sbu6qur6gxrra-7-251205085715-6ae07d24-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Goran Obradovic - The Rise of Sovereign AI: Building the Regi...](https://cdn.slidesharecdn.com/ss_thumbnails/7nw2xxixrxqdxvrb5wca-6-251205085714-ab09a2ac-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Dusan Jovicic - AI Story: From on-prem to cloud and back agai...](https://cdn.slidesharecdn.com/ss_thumbnails/8kp49m6uq22ifnbwhfnk-2-251205085715-964d11a6-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Max Talanov - Non digital NNs.pptx](https://cdn.slidesharecdn.com/ss_thumbnails/wif8tr3gtua74qvtopke-non-digital-nns-251205090438-26b0eea6-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Nikola Rajovic - Hardware Technologies Under the Hood: RISC-V...](https://cdn.slidesharecdn.com/ss_thumbnails/o2gptrmtoyqndgoshwgq-dsc2025-tenstorrent-rajovic-251205090438-814685f5-thumbnail.jpg?width=640&height=640&fit=bounds)