Downloaded 51 times












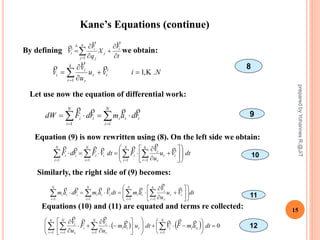
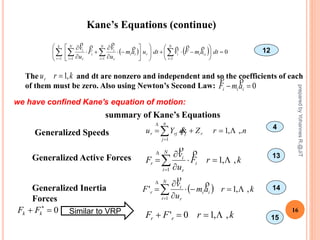
















The document discusses Kane's method for modeling multi-body systems. It begins with an introduction to multi-body systems and generalized coordinates. It then covers Kane's method which uses generalized speeds and forces to develop equations of motion in a compact form. The method encapsulates both holonomic and non-holonomic constraints. Kane's method is considered superior to other methods for modeling complex multi-body systems. The document provides details on deriving Kane's equations using virtual work principles and generalized speeds and coordinates.



































































