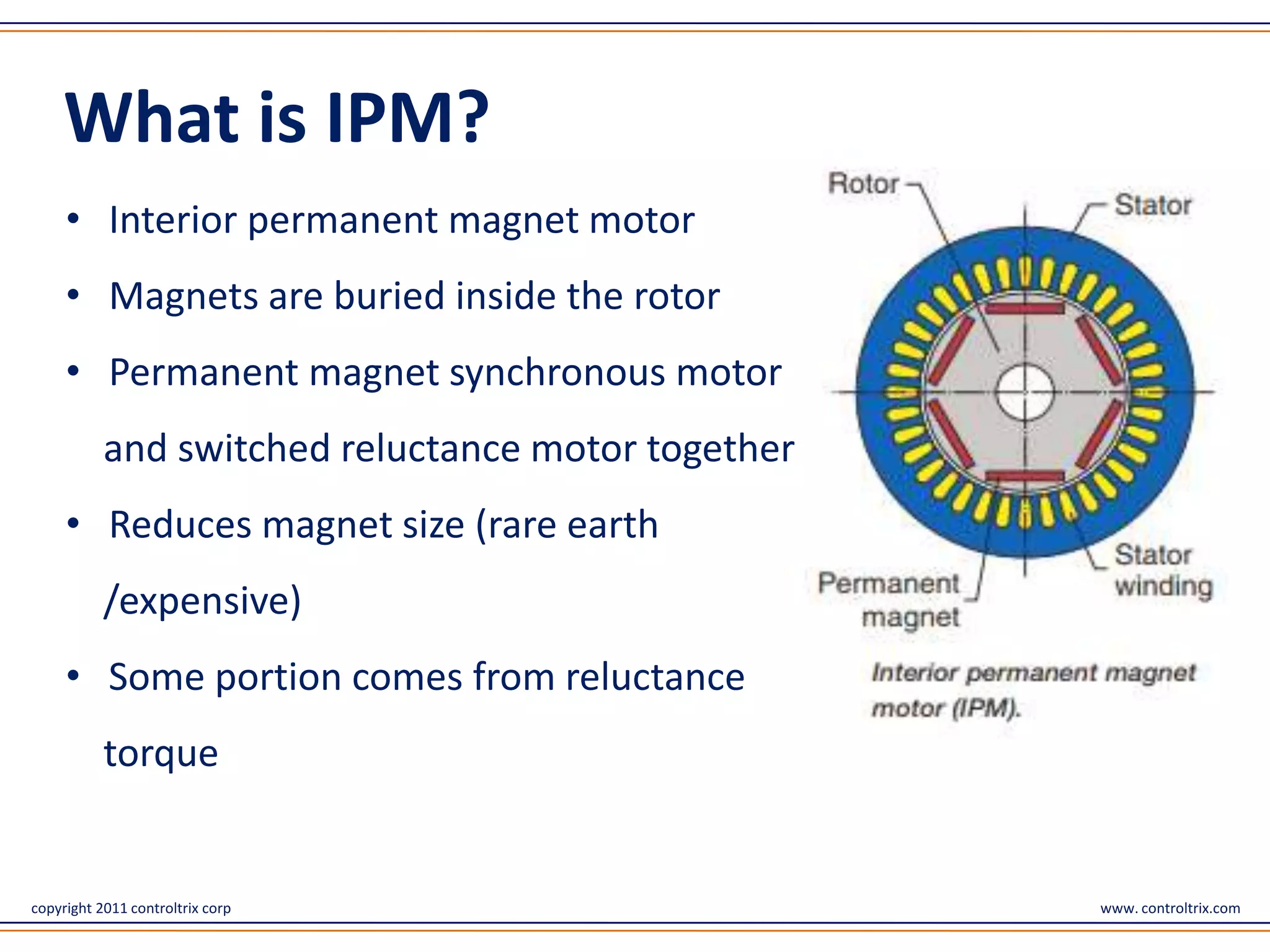
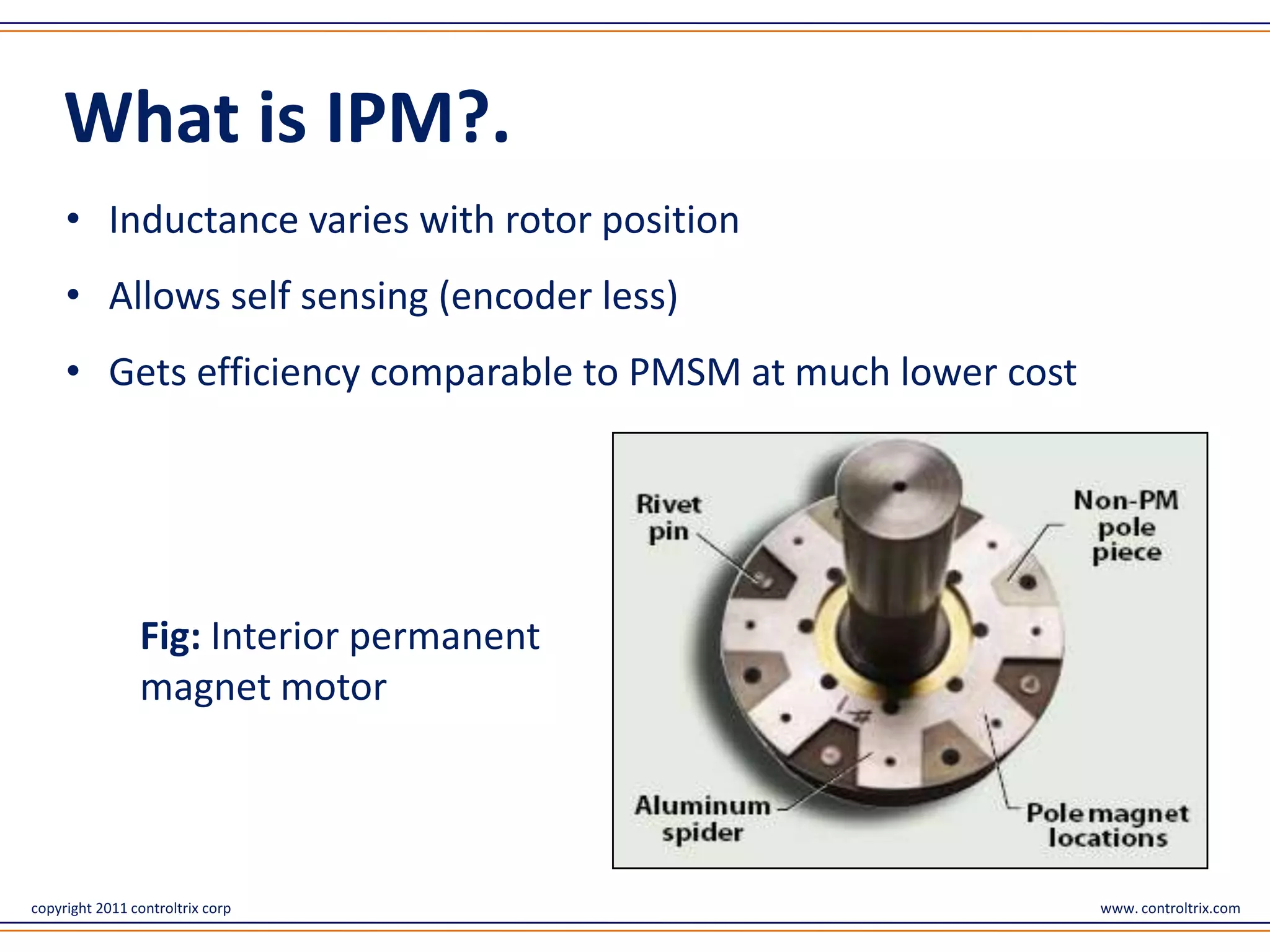



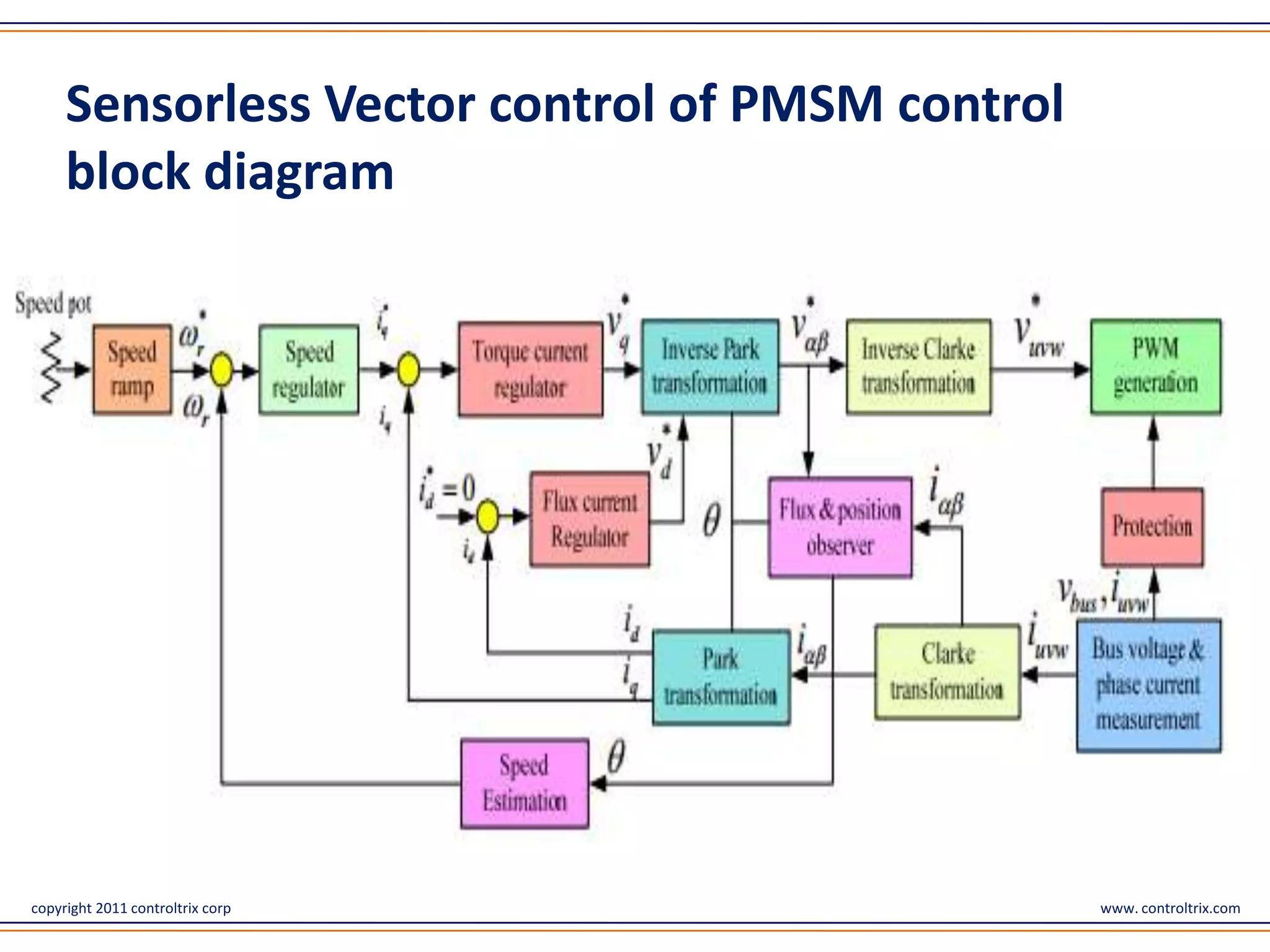








The document provides an overview of Interior Permanent Magnet (IPM) motors, detailing their structure, advantages, and control mechanisms. It discusses sensor-less vector control methods for achieving optimal performance and efficiency, especially in low-speed applications. Additionally, the document emphasizes the authors' expertise in developing algorithms and solutions for next-generation motor drives, including performance testing and consulting services.