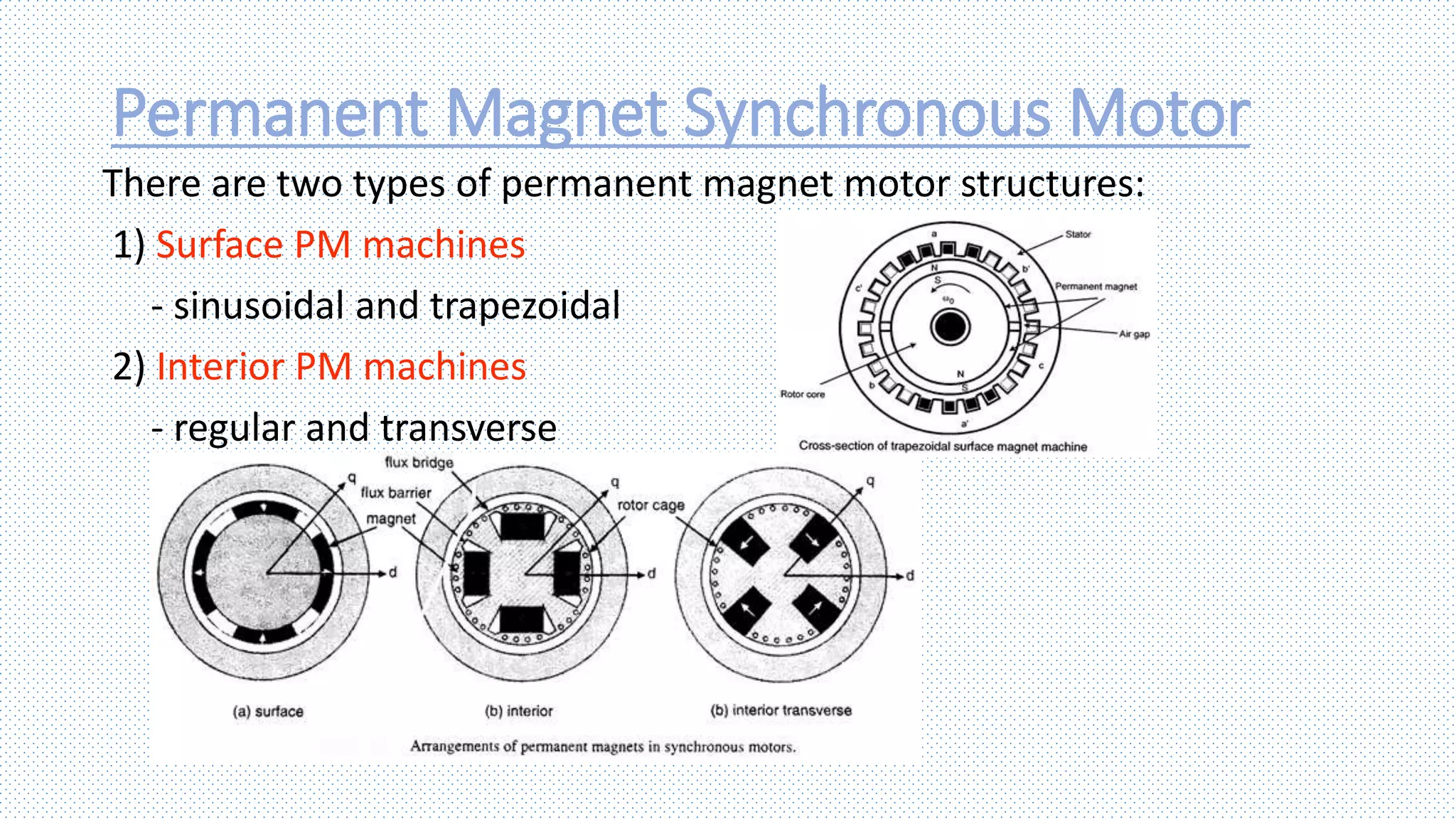
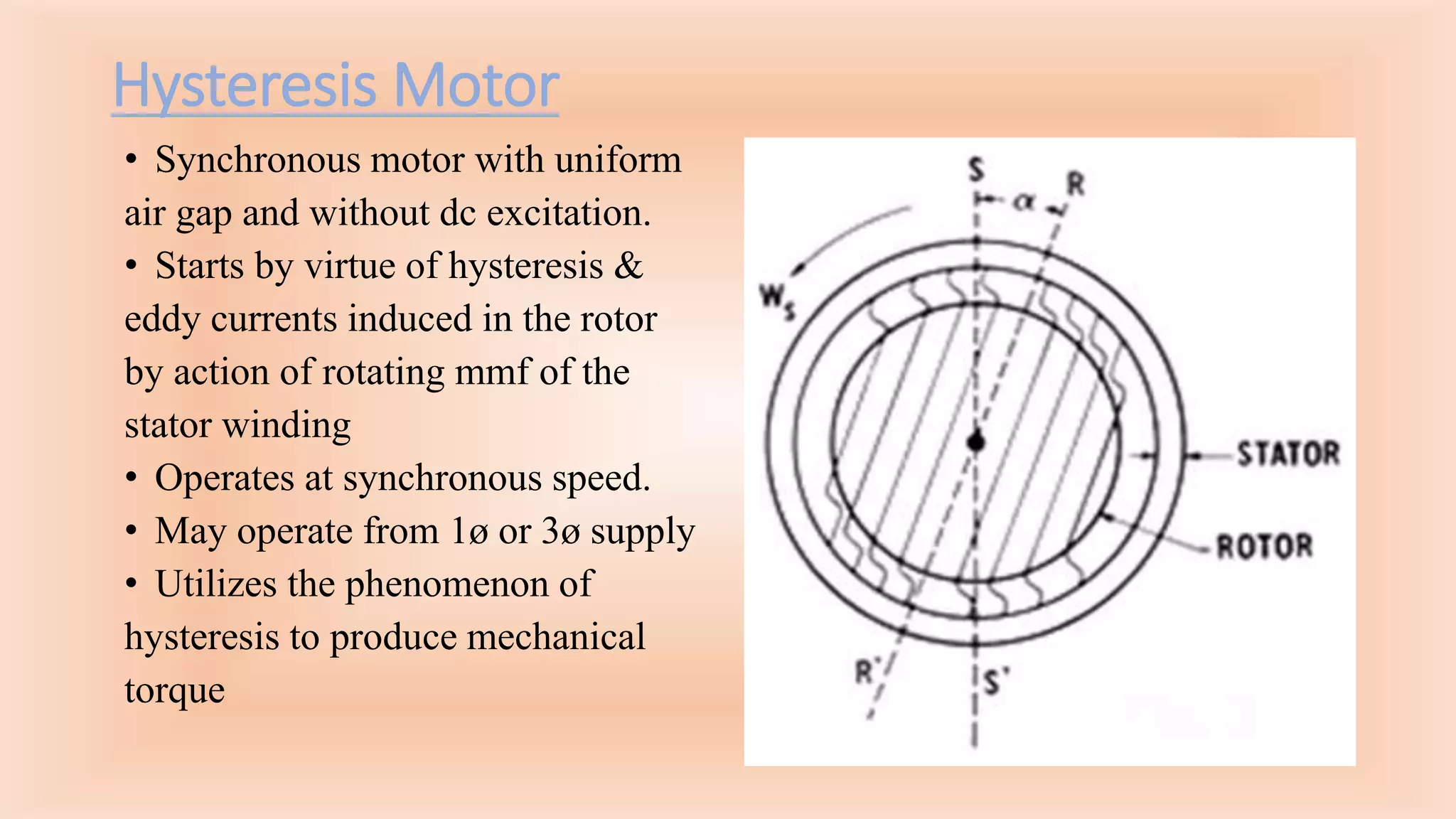
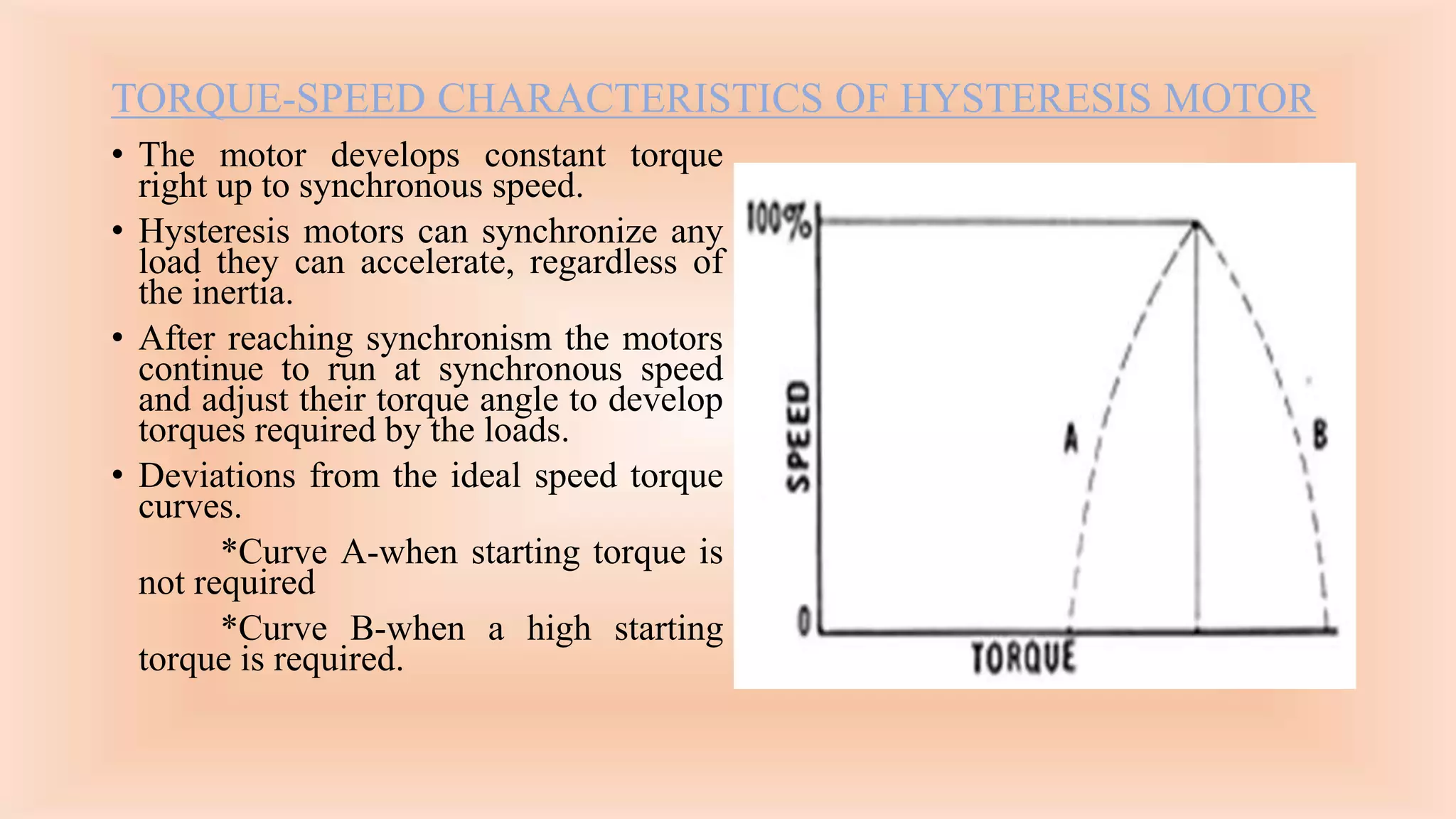
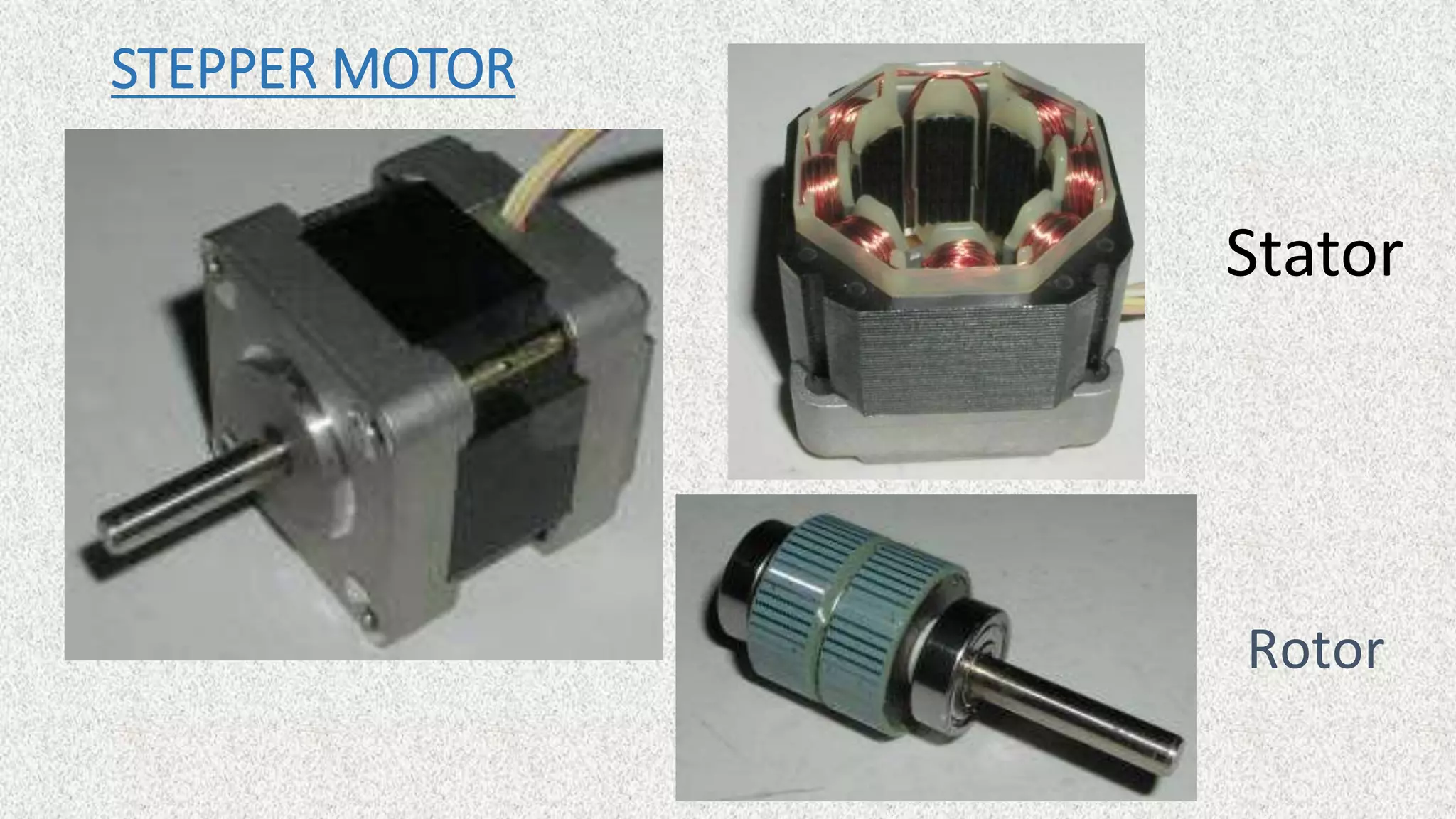
This document summarizes several types of fractional horsepower motors: permanent magnet synchronous motors, reluctance motors, hysteresis motors, stepper motors, and servo motors. It provides details on their construction, operation principles, qualities, applications, and torque-speed characteristics. The key points are that permanent magnet synchronous motors can operate noiselessly and with high efficiency, reluctance motors have a simple low-cost structure, hysteresis motors develop constant torque and synchronize under any load, stepper motors have precise movement control, and servo motors provide higher torque and RPM with feedback control.