Downloaded 26 times


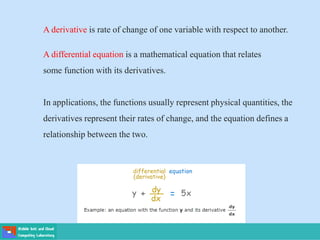
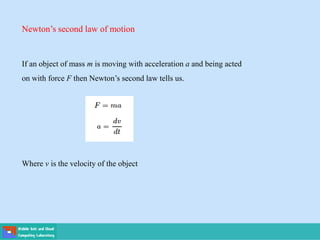
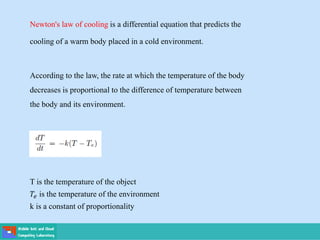
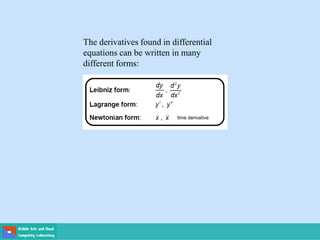
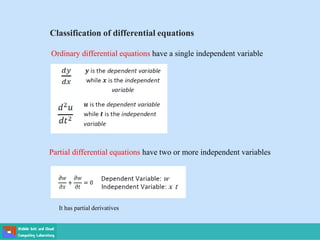















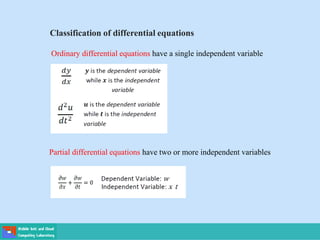
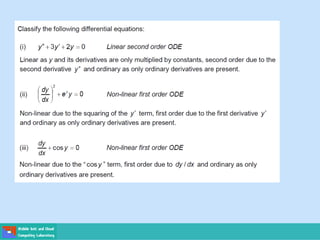
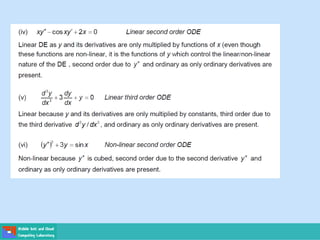
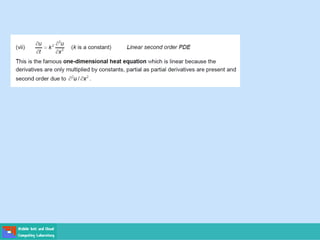
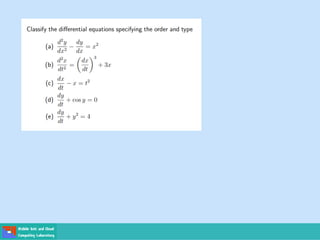

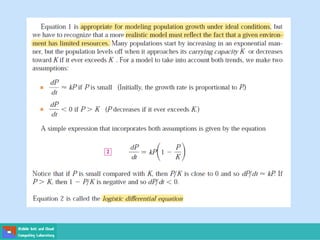

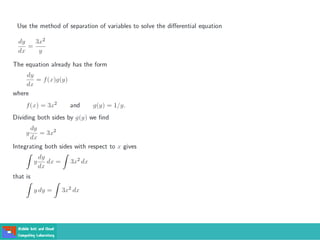
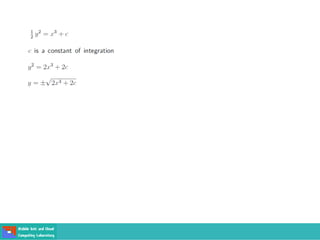
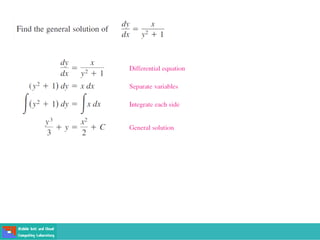
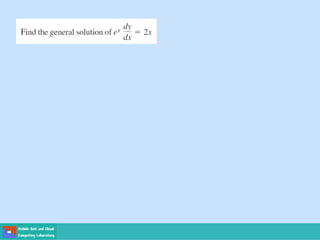
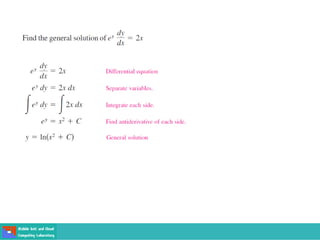
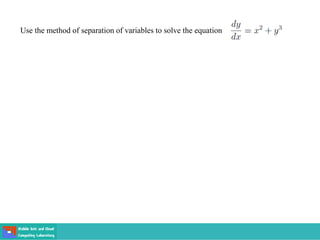















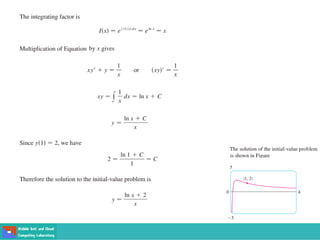




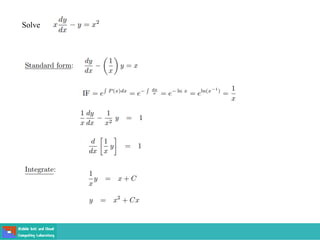
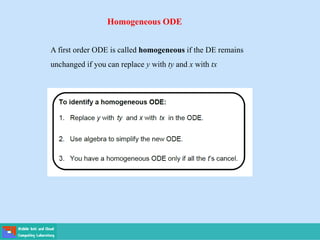
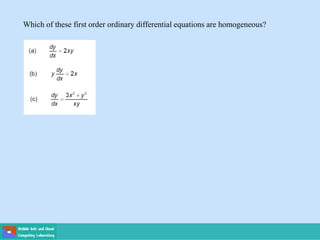
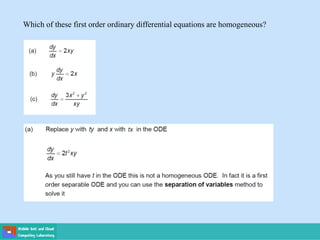
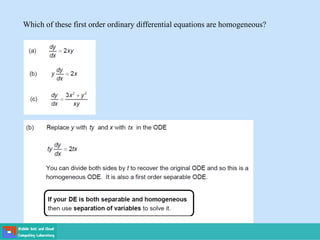
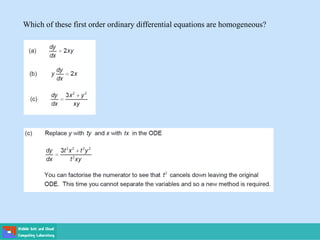
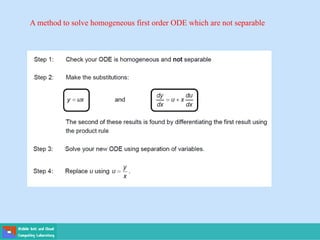
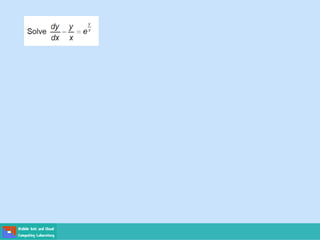
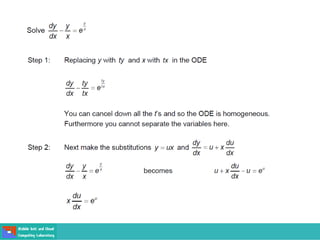
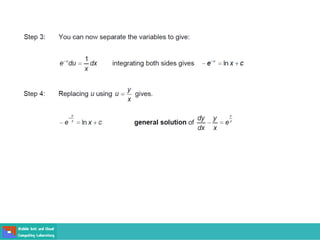
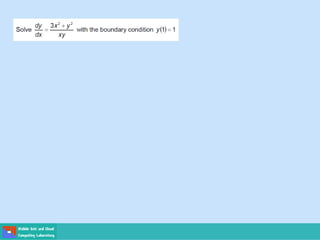
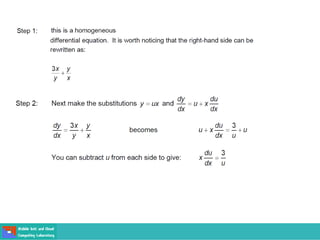
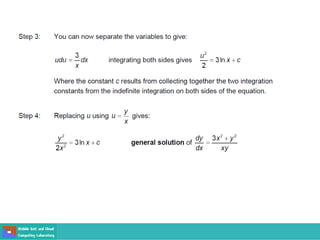
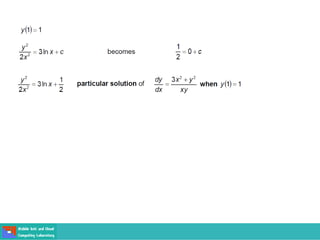
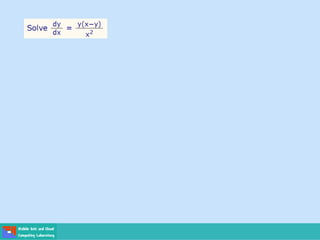
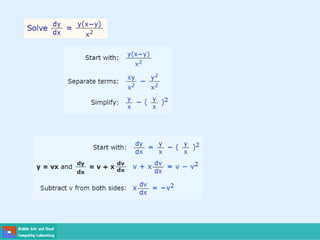
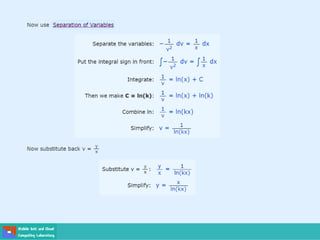

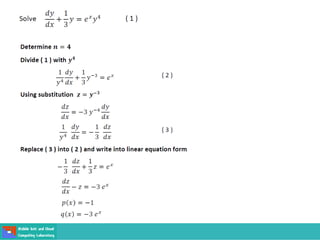
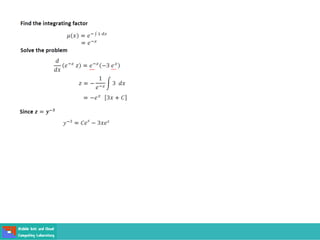

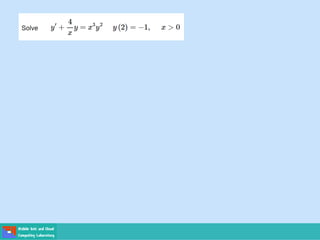

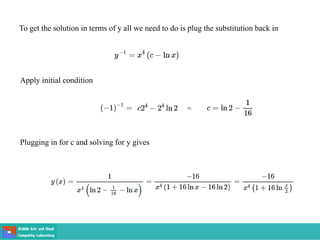

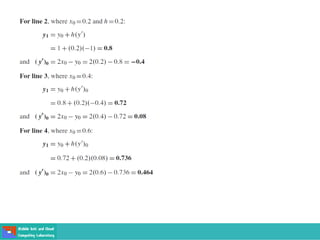




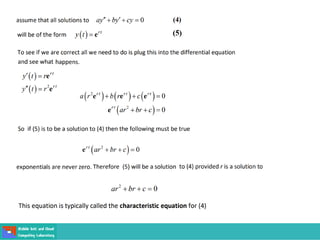
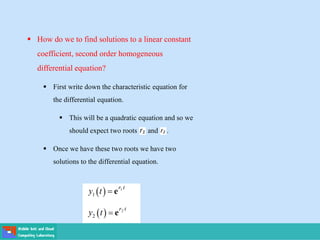
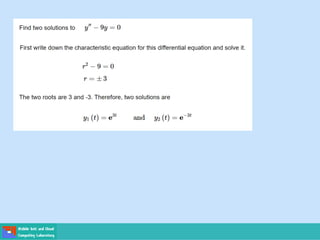
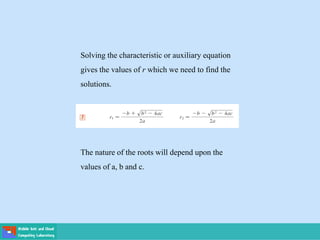


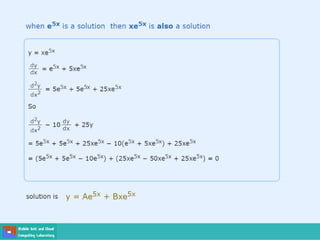
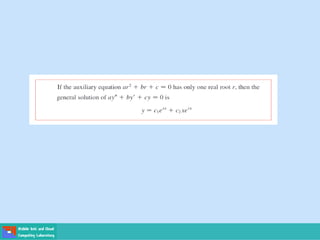
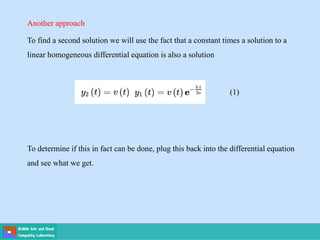
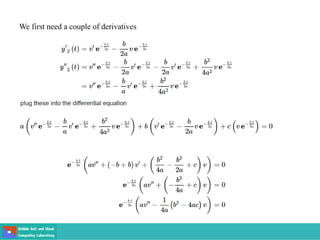

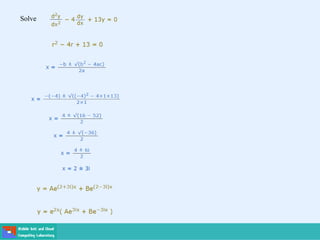
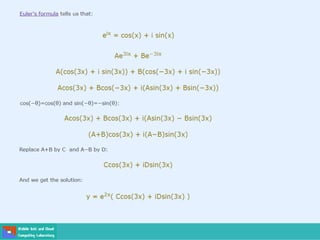




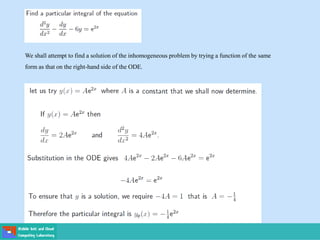
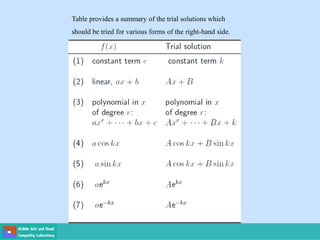
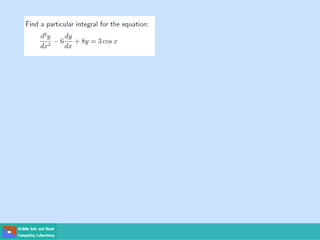
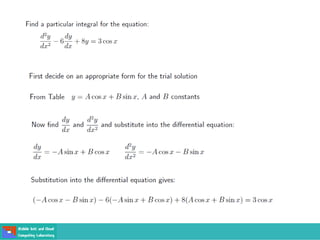

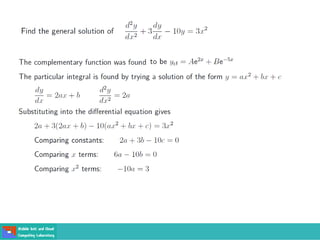
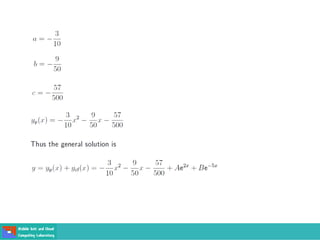

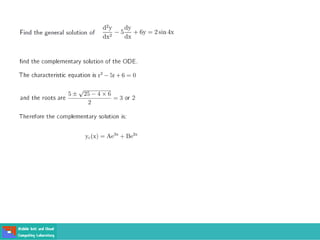
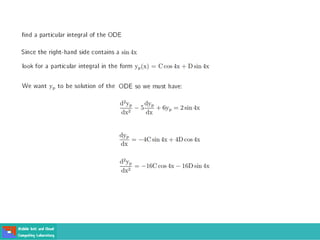
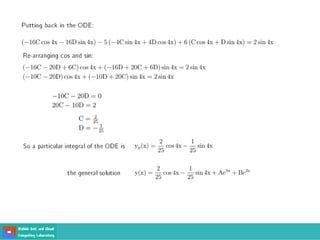
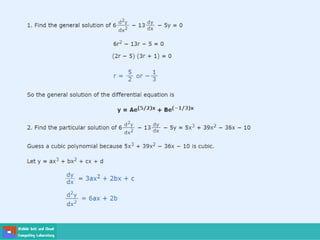
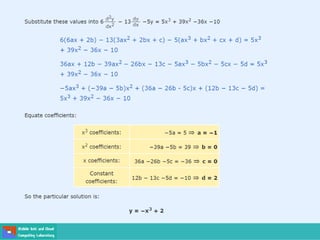
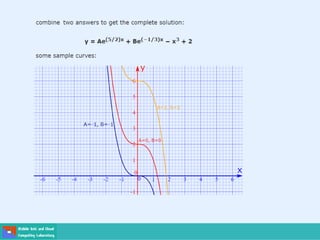


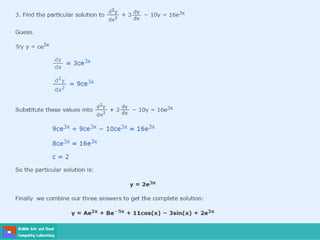
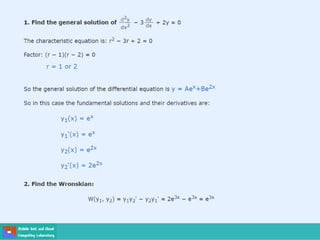
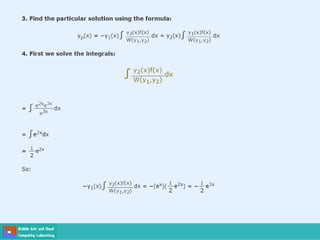
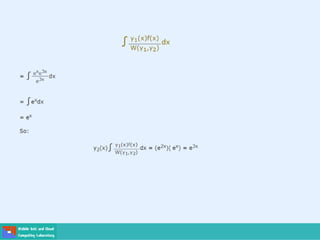
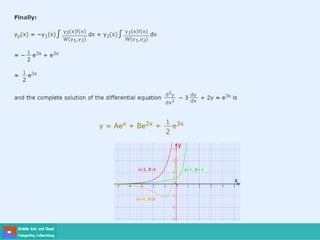










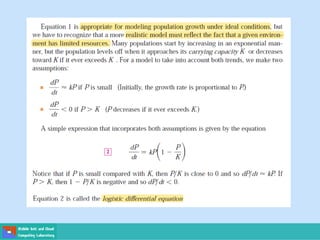

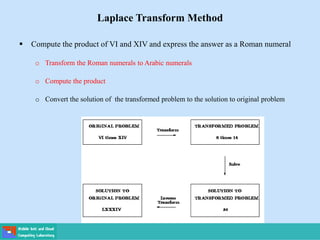
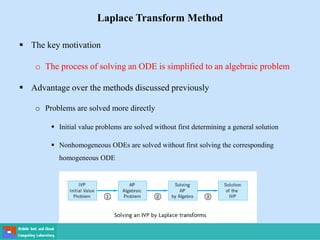
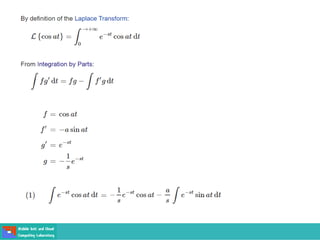
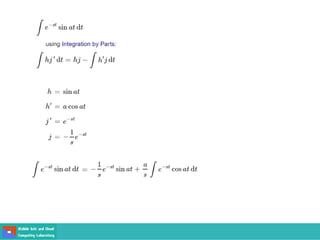
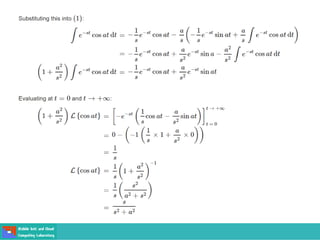
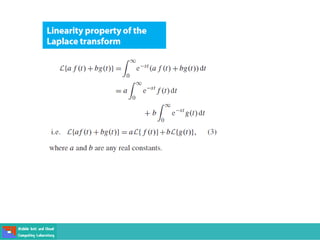







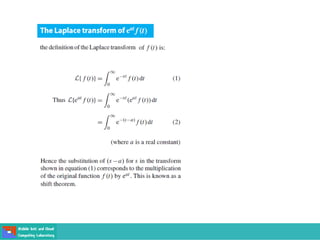
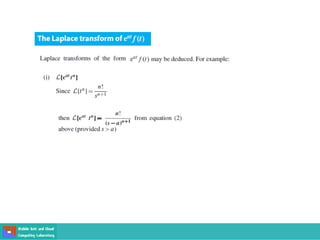
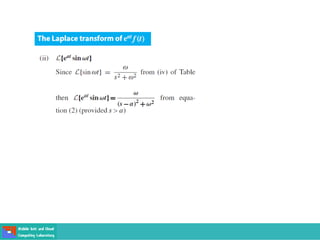

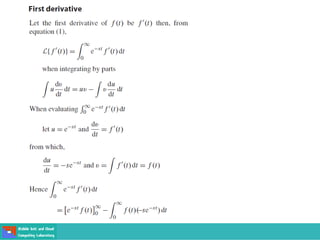
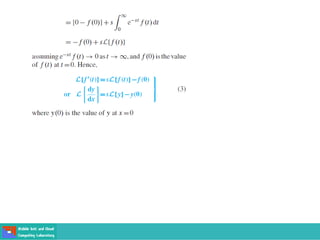

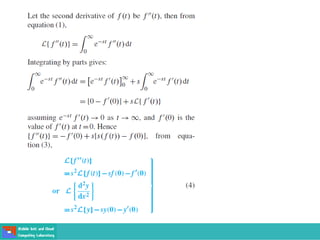
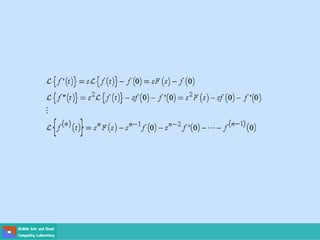









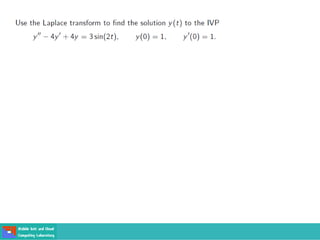

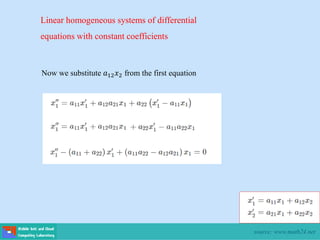
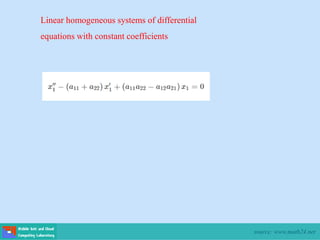
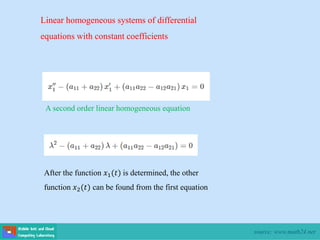

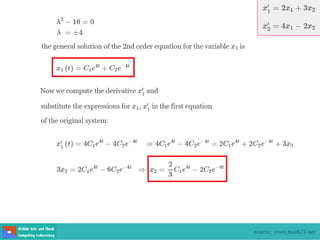
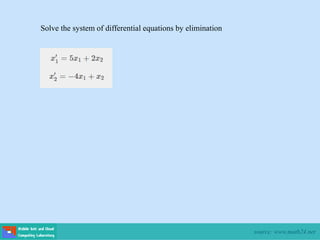

This document contains lecture slides on engineering mathematics from Sayed Chhattan Shah. It introduces differential equations and their applications. Some key points covered include: - A differential equation relates a function to its derivatives. The functions often represent physical quantities and the derivatives represent rates of change. - Ordinary differential equations have one independent variable, while partial differential equations have two or more. - Methods for solving differential equations include separation of variables, integrating factors, and numerical methods like Euler's method. - Applications include Newton's laws of motion and cooling, and population growth models. - Second order differential equations have solutions called complementary functions and particular integrals.