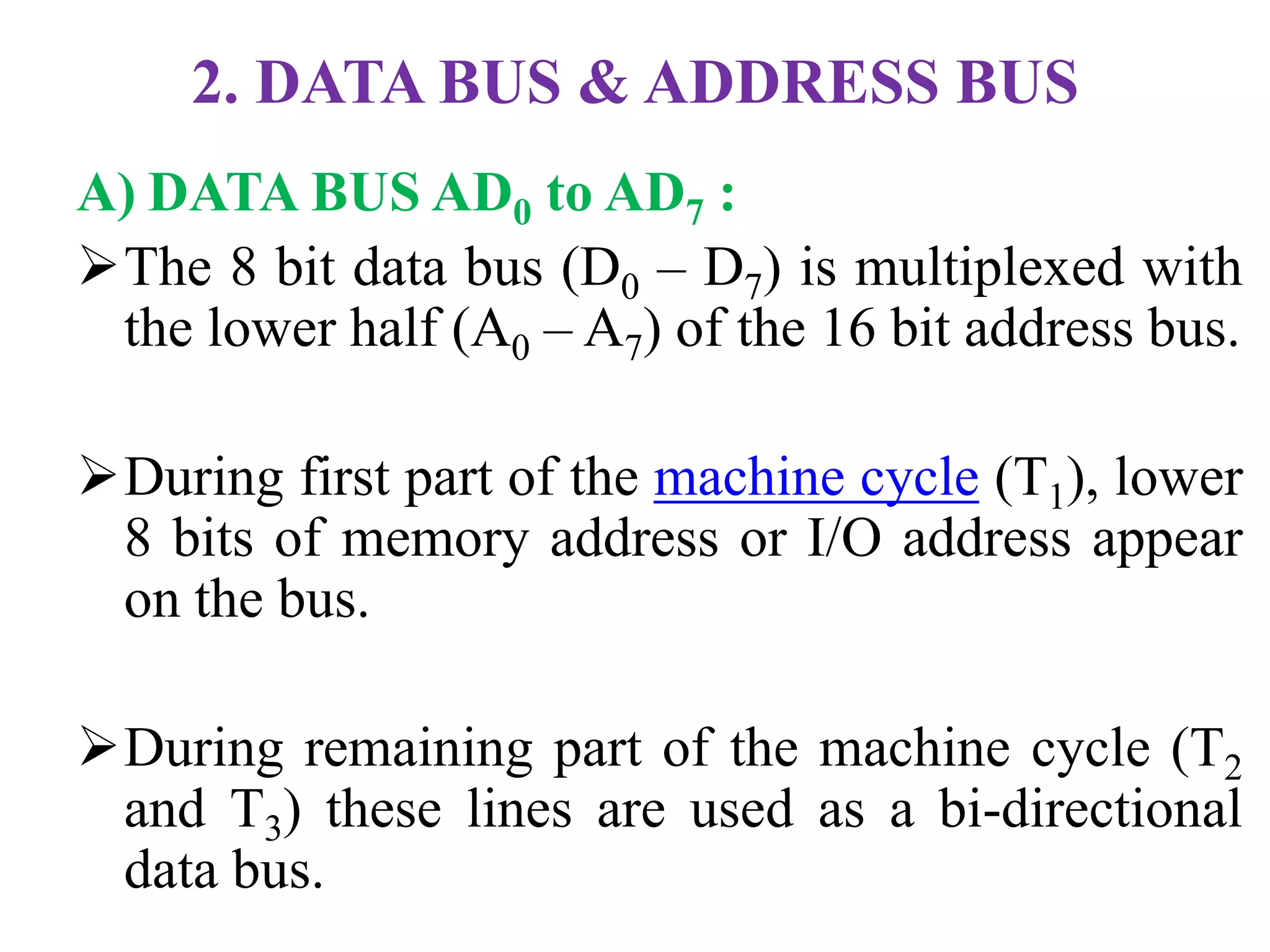
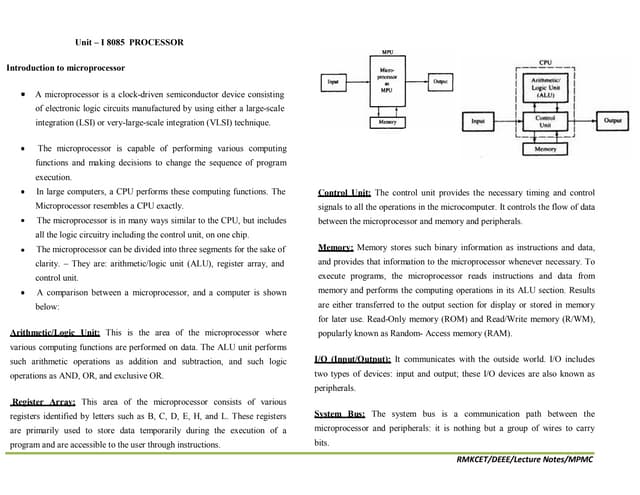
The document provides an overview of the 8085 microprocessor and 8051 microcontroller, discussing their architectures, characteristics, and applications. It introduces microprocessors as integrated circuits that manage various functions within computers and microcontrollers as specialized chips designed for specific tasks. Additionally, the content highlights differences between microprocessors and microcontrollers in terms of functionality and internal structures.