Download to read offline
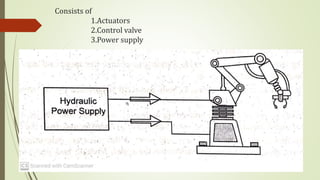
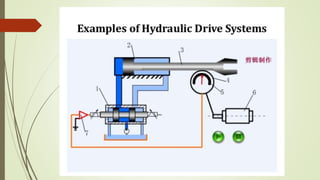
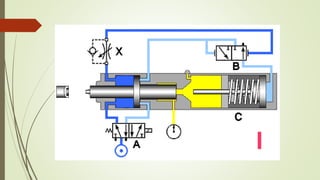
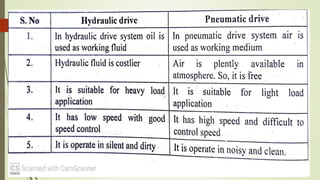
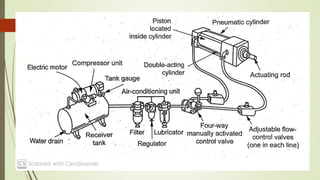
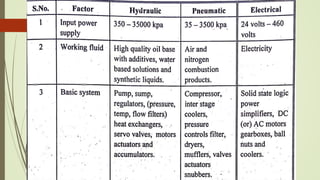
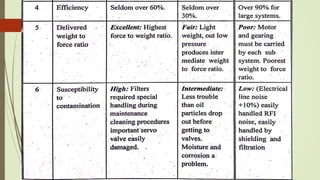
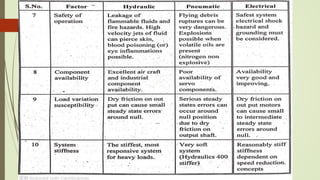
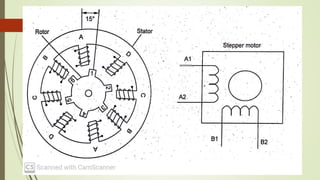
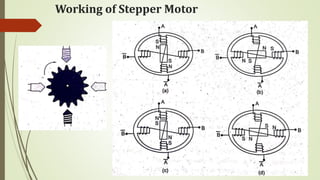
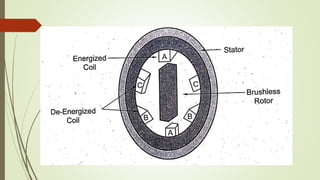
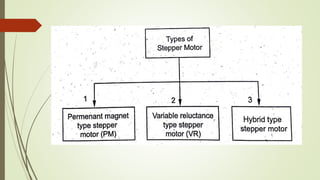
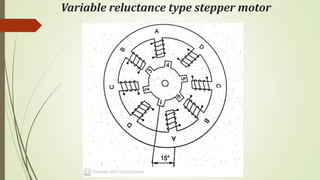
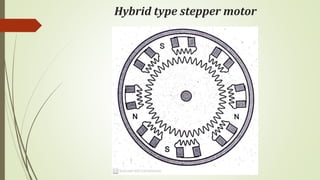
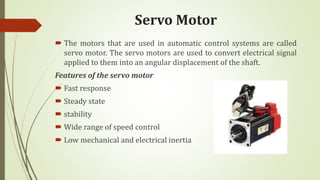
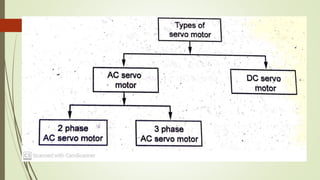
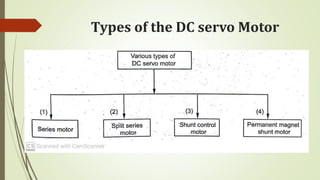
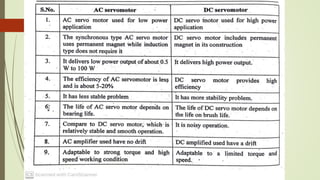
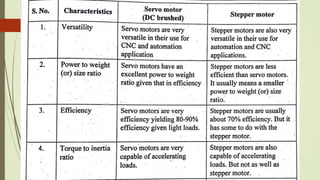
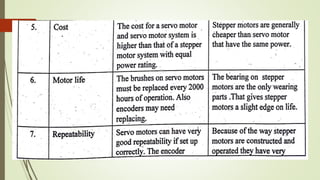
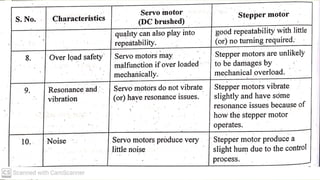

The document discusses various types of robot drive systems and end effectors. It describes hydraulic, pneumatic, and electric drive systems. Hydraulic drives use pressurized fluid and are suitable for heavy loads. Pneumatic drives use compressed air and are cheaper but generate more noise. Electric drives include AC servo motors, DC servo motors, and stepper motors. Stepper motors convert electrical pulses to rotational movement precisely. Servo motors are used in automatic control systems. The document also discusses actuators, motors, and end effectors like grippers used by robots.























































































