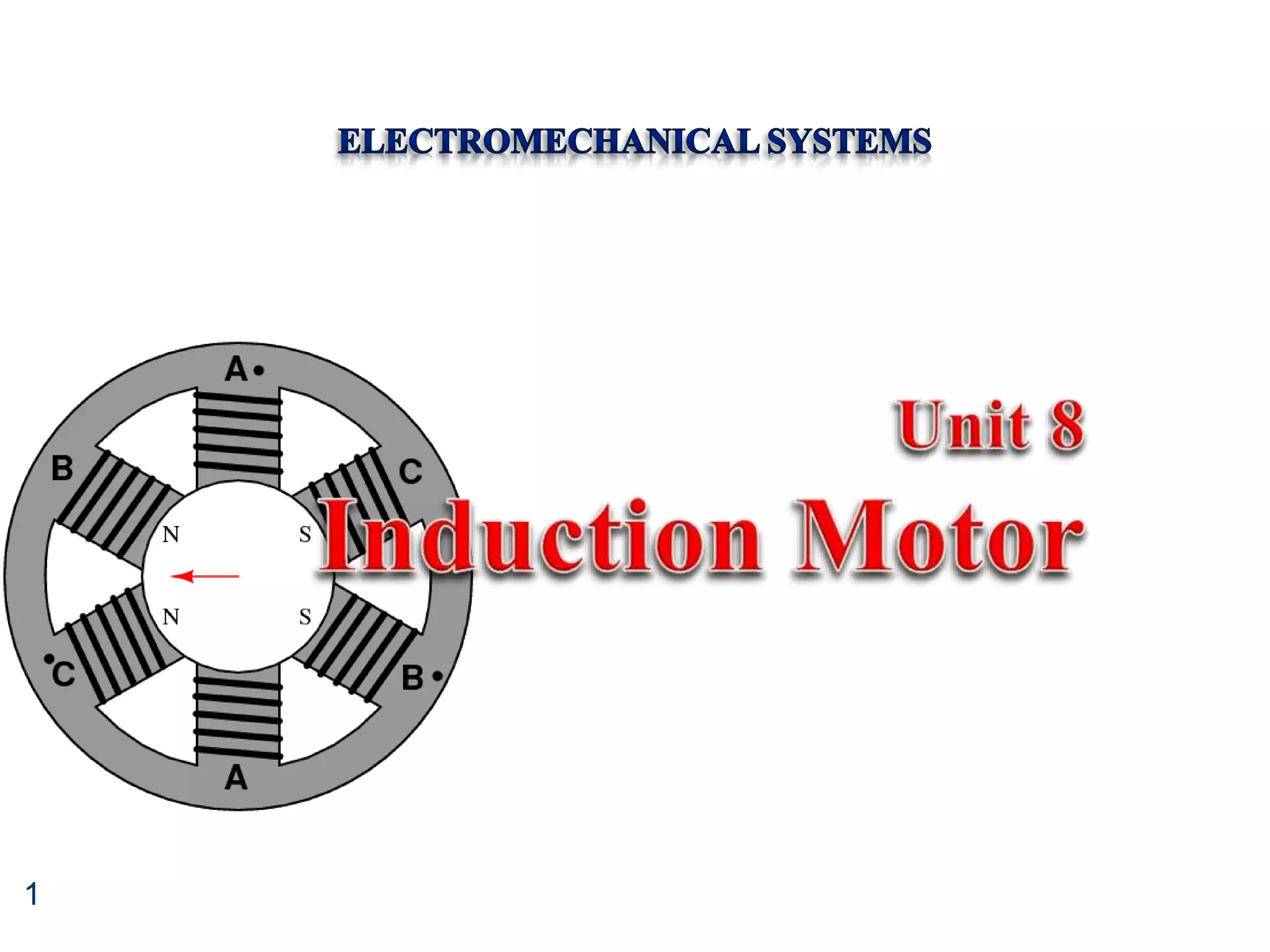
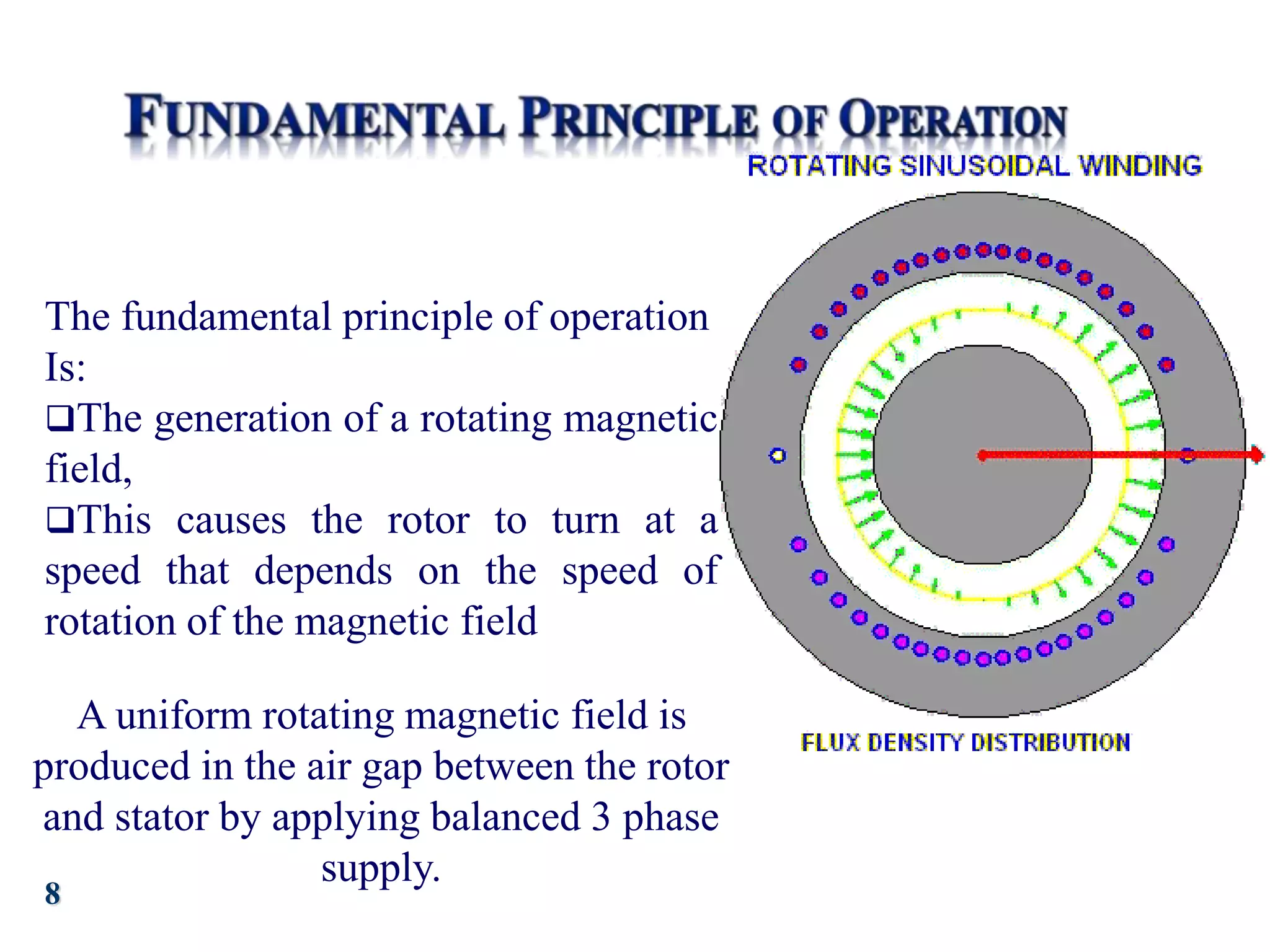
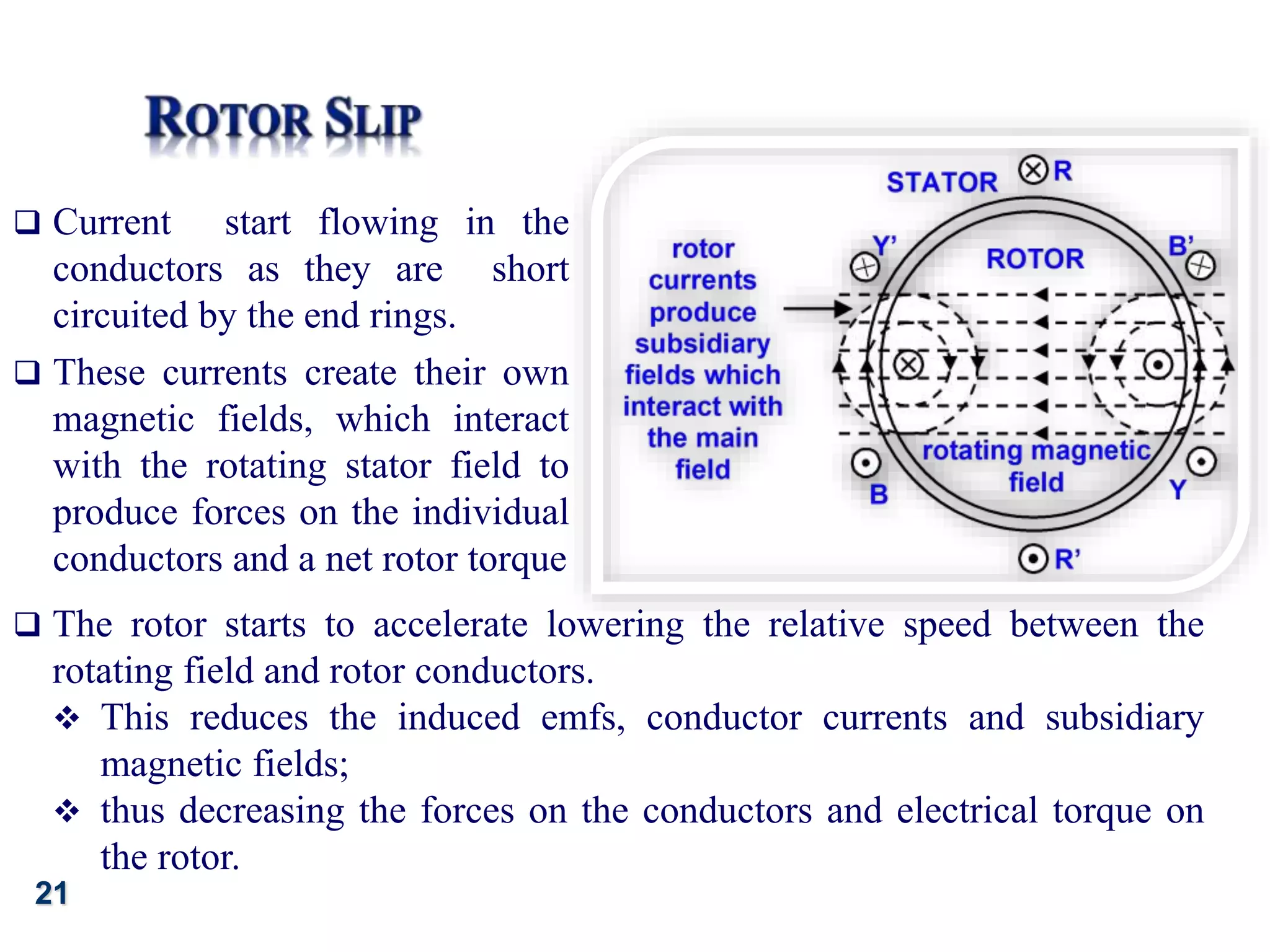
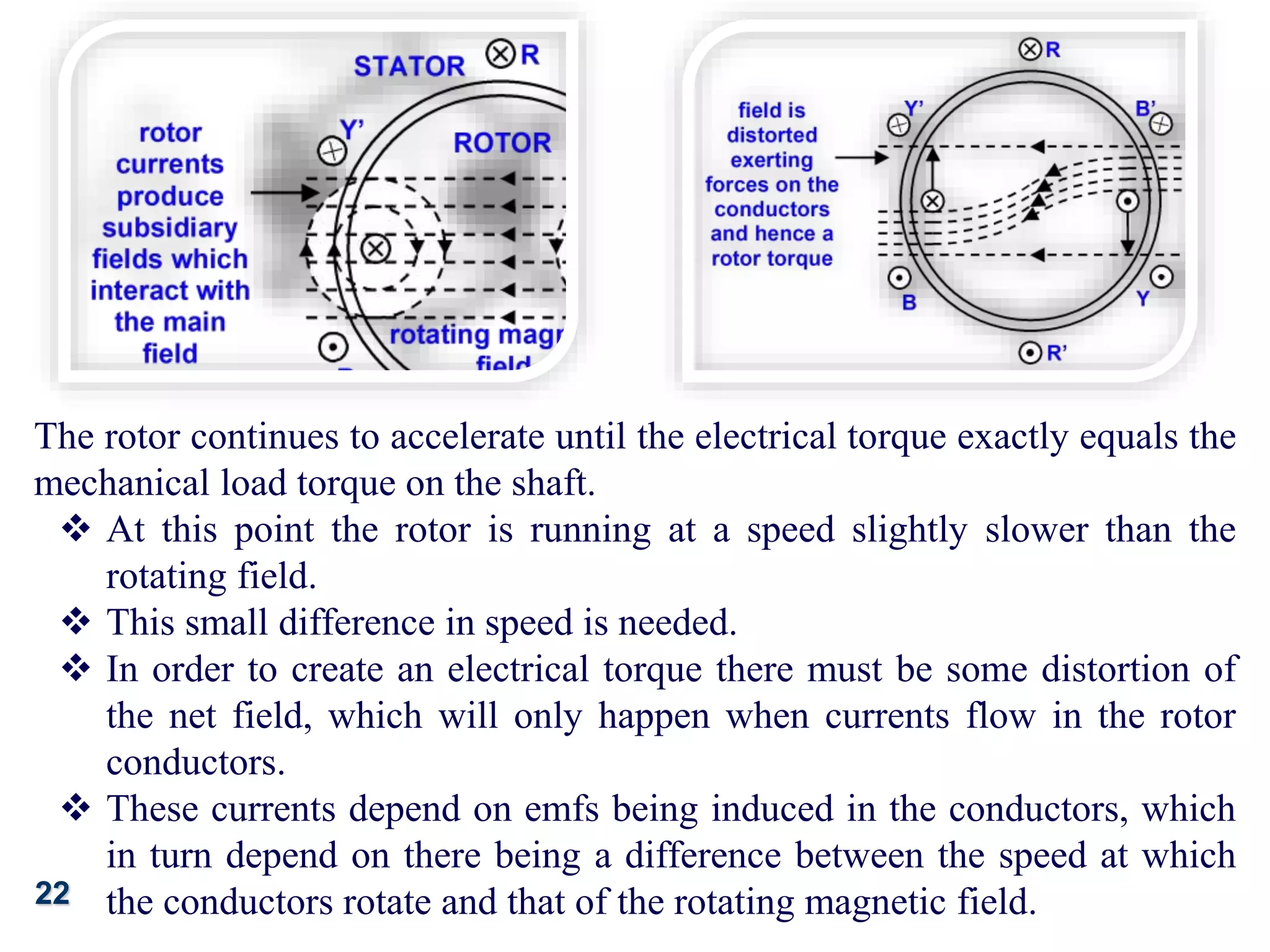
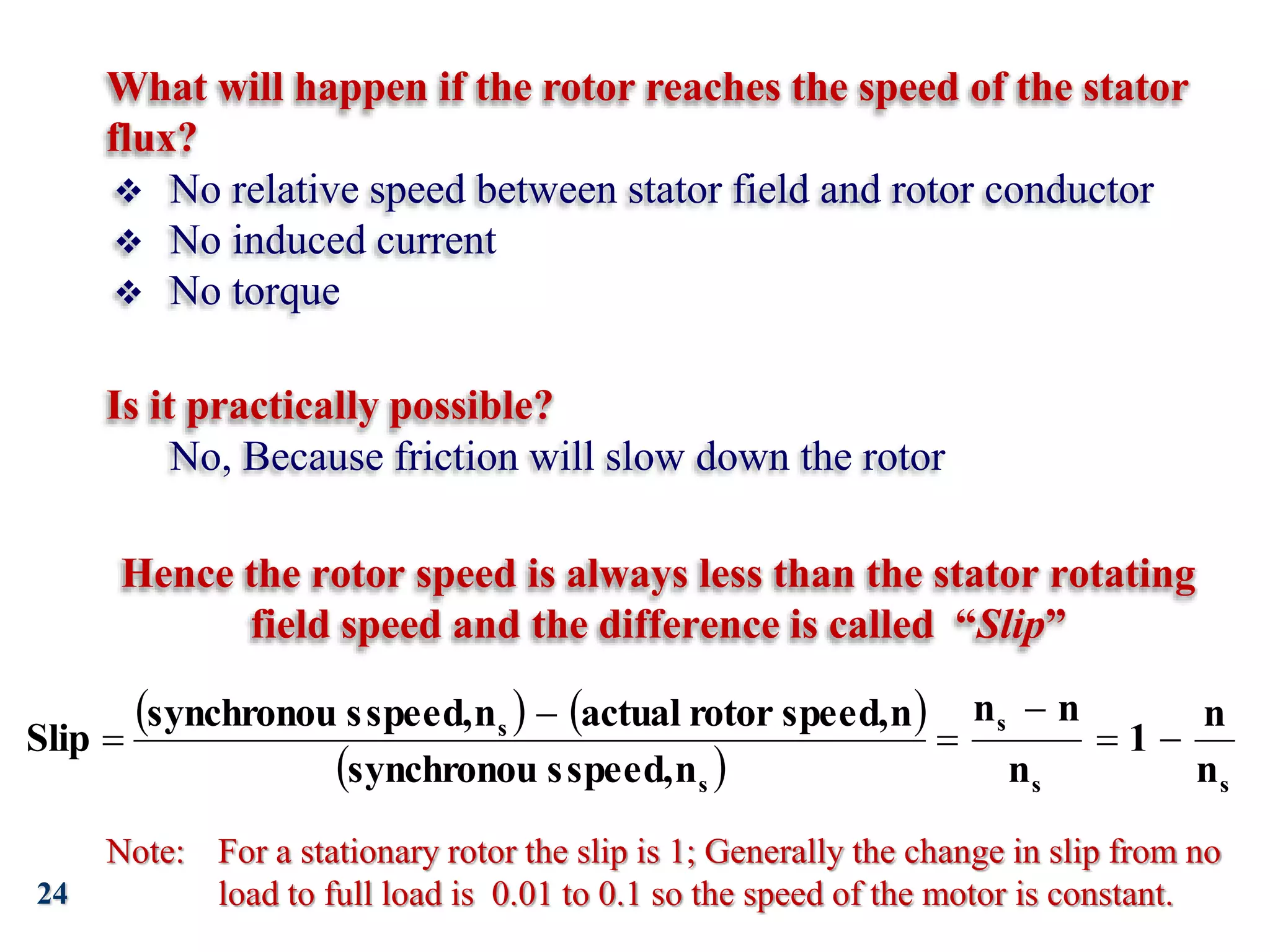
The document discusses the principles of operation of 3-phase induction motors. It explains that a 3-phase induction motor operates using a rotating magnetic field produced by a 3-phase AC current in the stator windings which causes the rotor to turn. As the rotor turns slightly slower than the rotating field, a slip is produced which generates an induced current in the rotor and produces torque. The torque causes the rotor to accelerate until the motor reaches its operating speed where the torque equals the load.