Downloaded 78 times
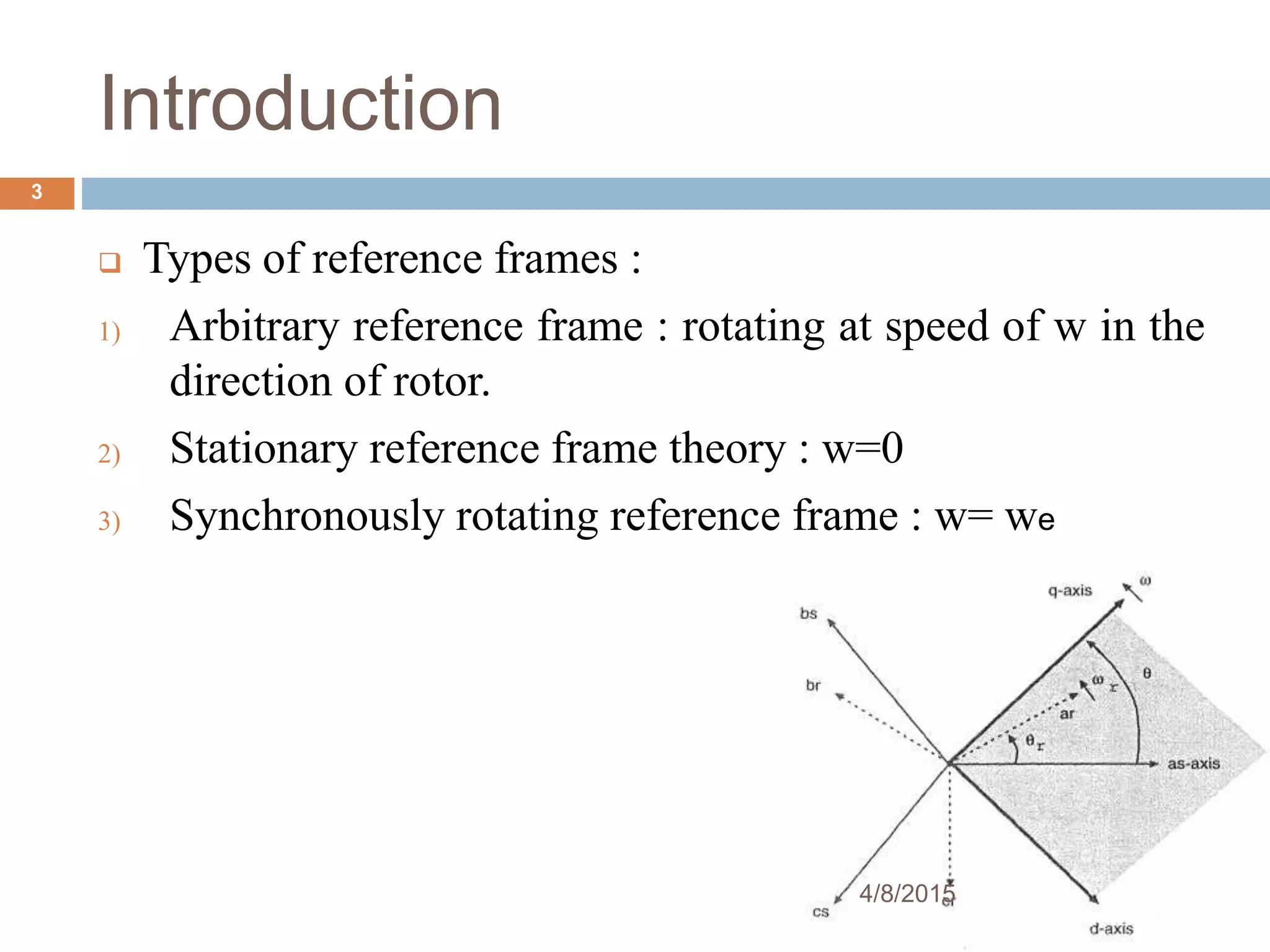
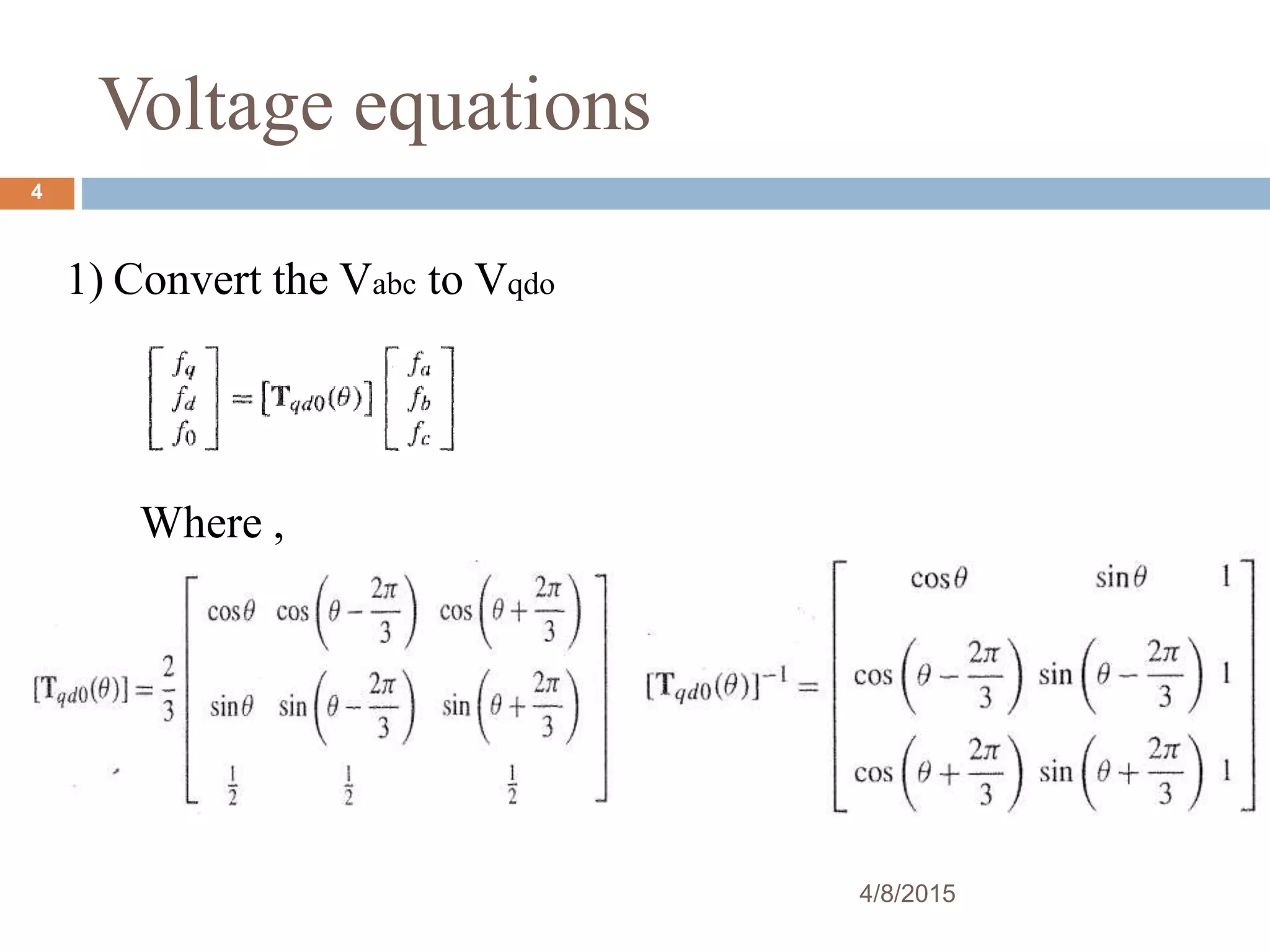
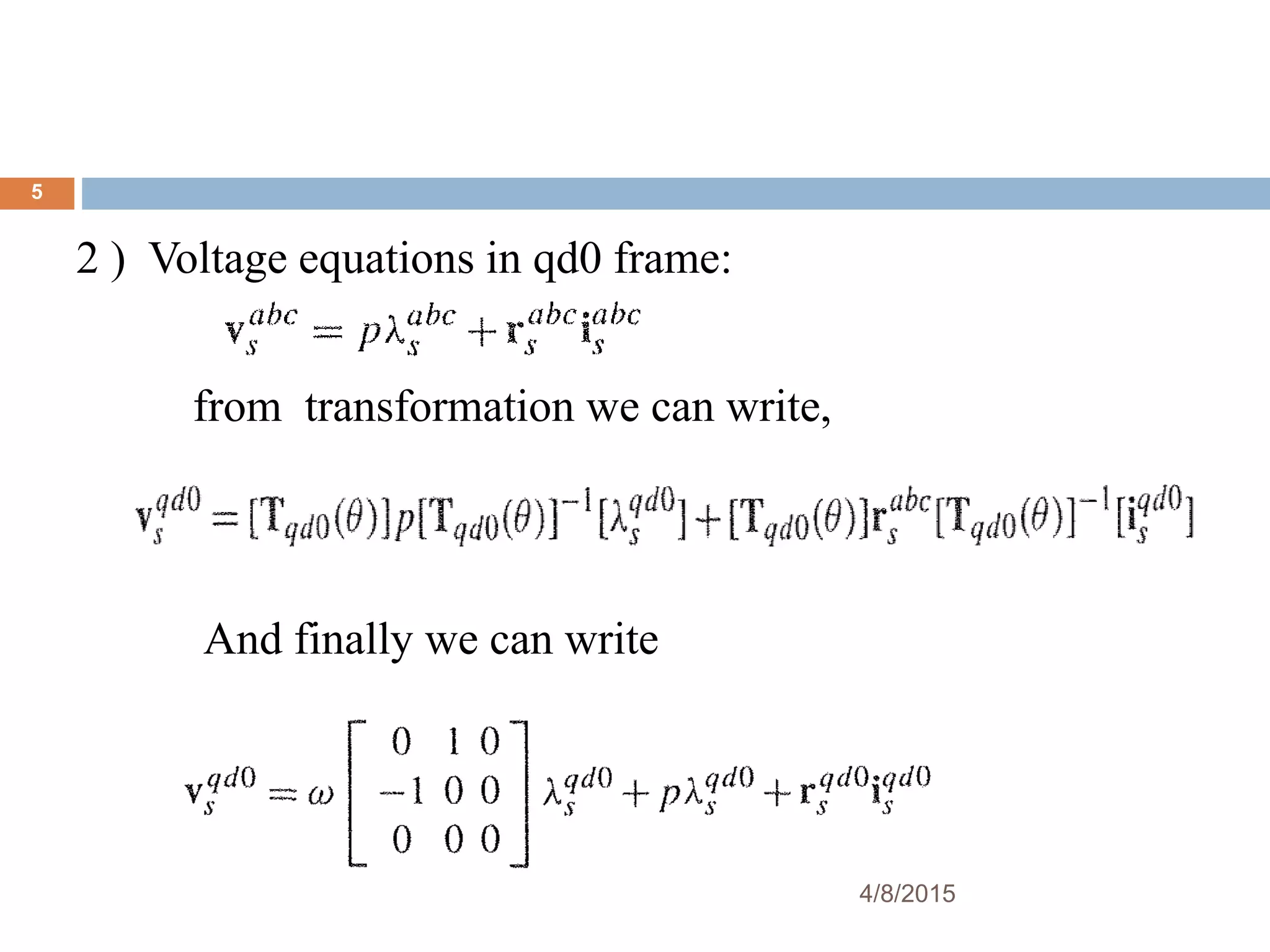
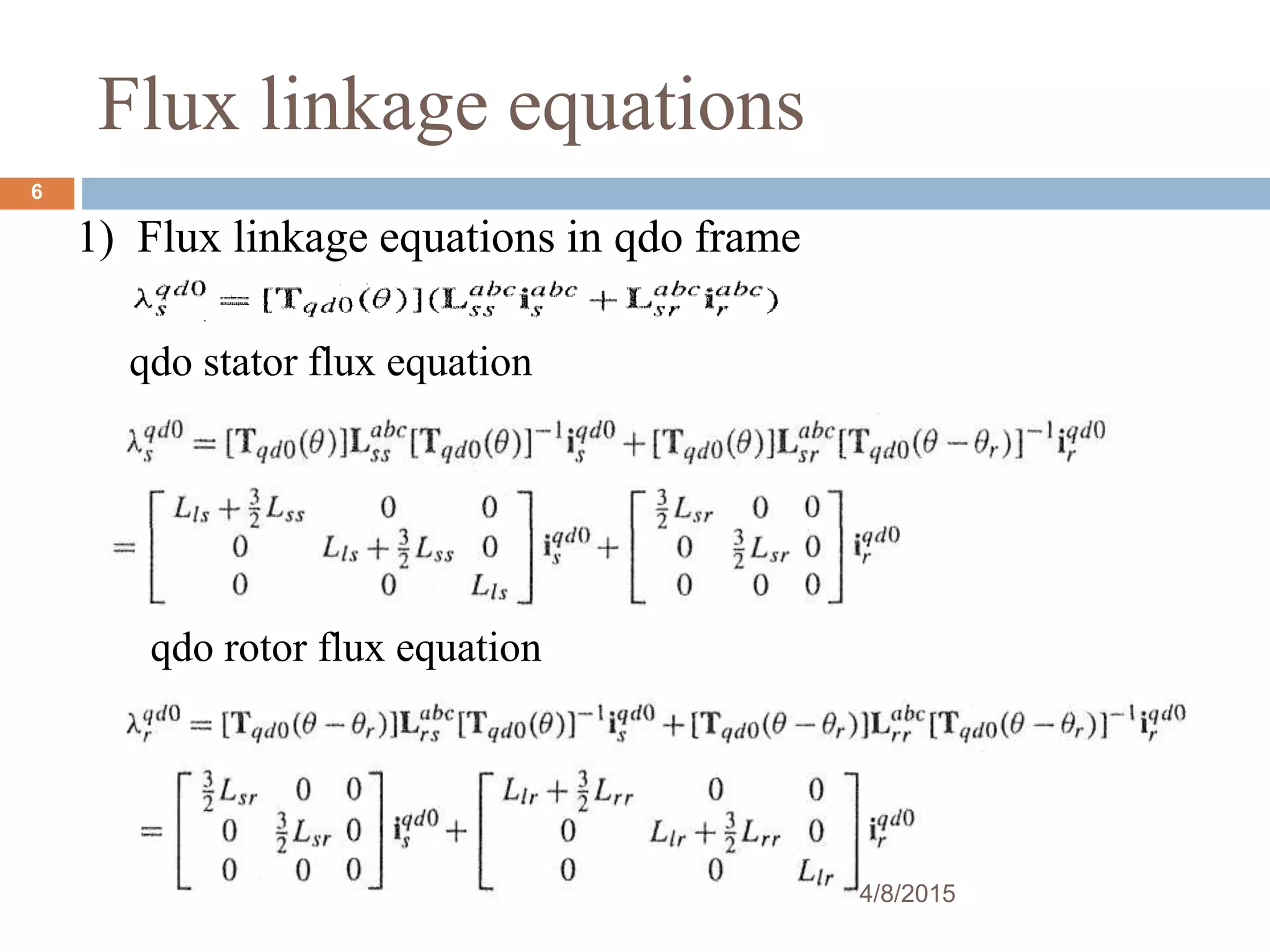

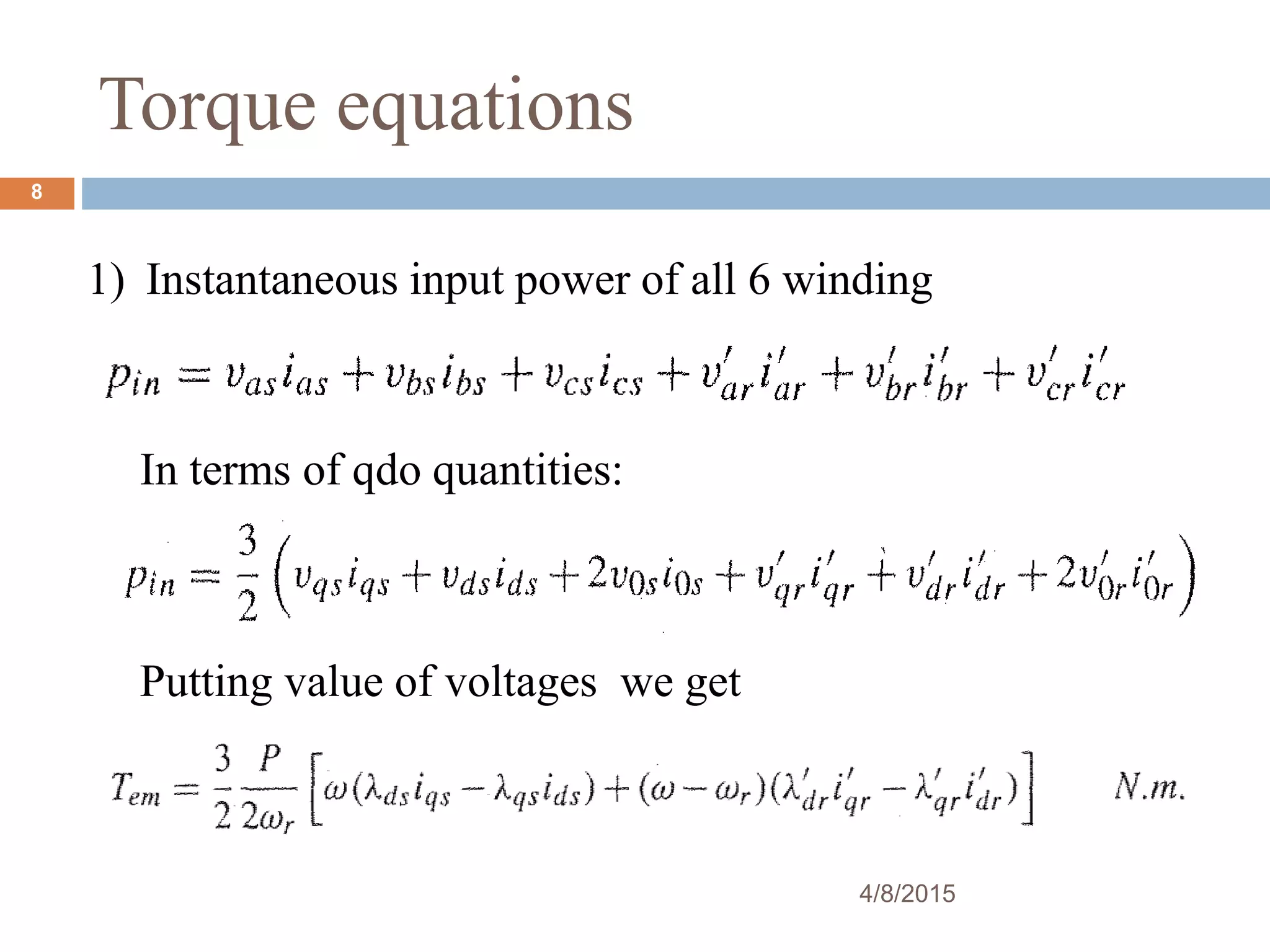
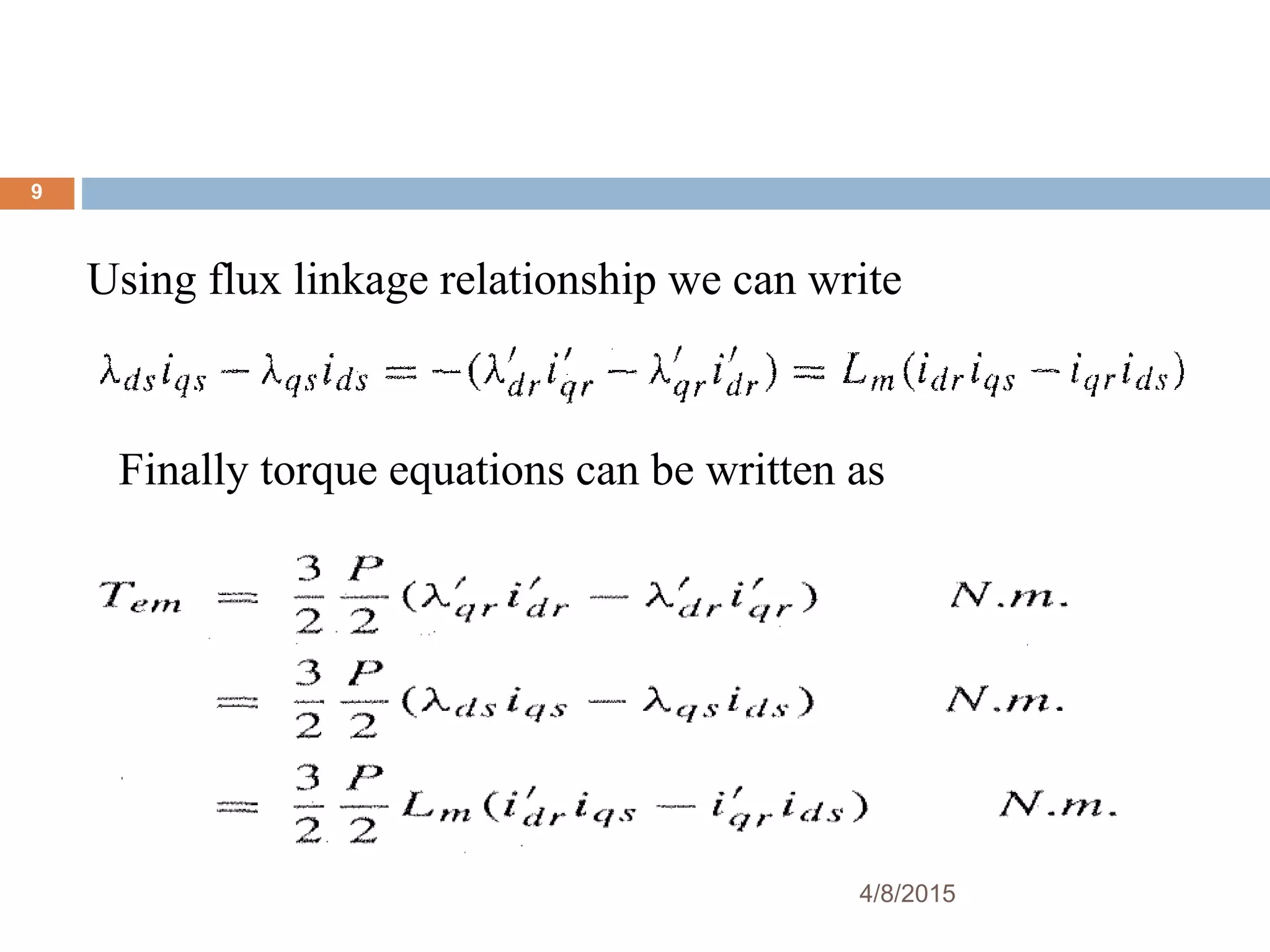
This document presents the modeling equations for induction machines. It introduces three reference frames for modeling: arbitrary, stationary, and synchronously rotating. It then derives the voltage, flux linkage, and torque equations in the d-q rotating reference frame. The voltage equations transform stator voltages to the d-q frame. Flux linkage equations relate the stator and rotor fluxes. Torque equations express torque as a function of flux linkage and current. In conclusion, the arbitrary reference frame allows the easiest mathematical modeling of induction machines while permitting saturation effects to be simulated.






































![Electric drives [ned mohan 2001 (scanned) 470pág]](https://cdn.slidesharecdn.com/ss_thumbnails/electricdrivesnedmohan2001-scanned470pg-121224050928-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)