Downloaded 41 times
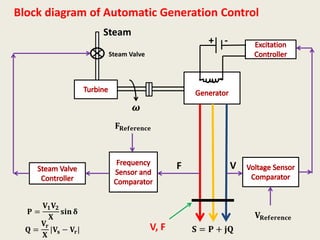
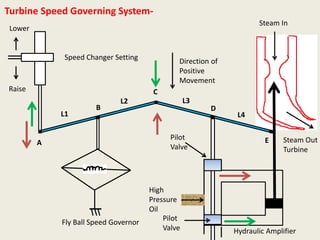
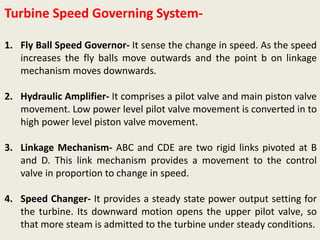
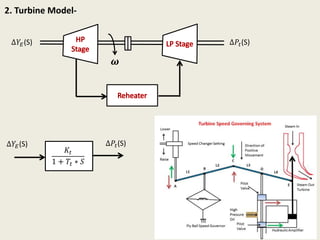
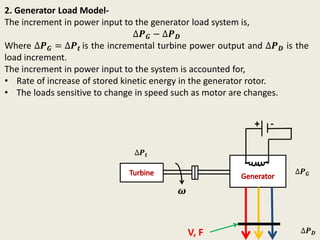
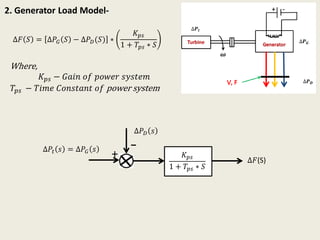
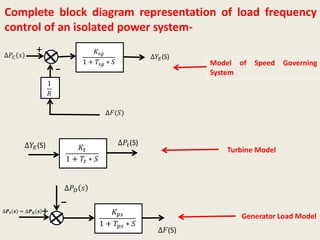
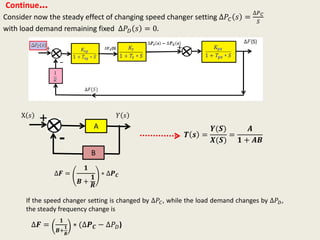
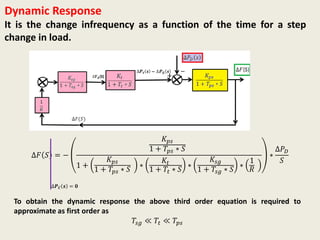
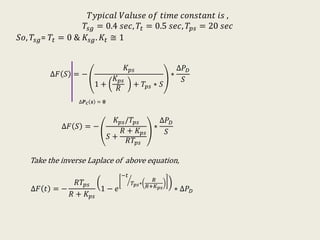
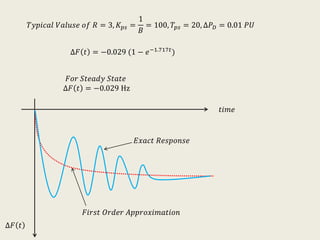
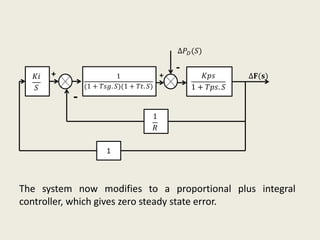
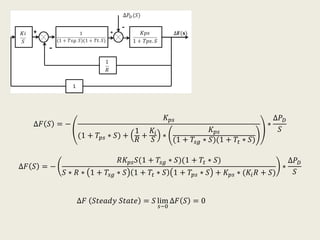
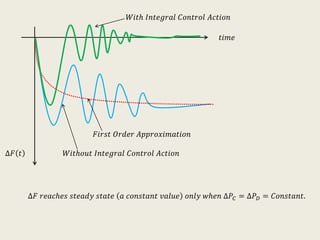
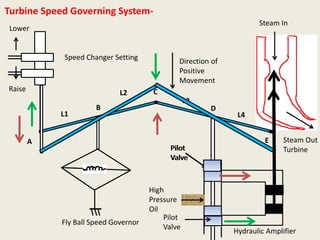
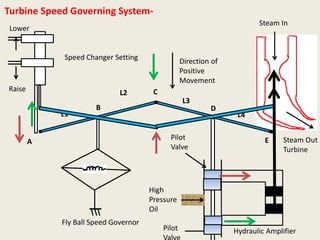

This document provides an overview of automatic generation control (AGC) in power systems. It includes: 1) Block diagrams showing the components of AGC including speed governors, turbines, generators and load control. The diagrams model the dynamics of these components. 2) Descriptions of the turbine speed governing system, including flyball governors, hydraulic amplifiers and linkage mechanisms used to control steam flow based on generator speed. 3) Equations modeling the dynamics of the speed governor, turbine, and generator-load system and their interaction under different conditions like a load change when the speed changer is fixed. 4) Explanations of concepts like droop characteristic and steady-state frequency deviation from a load