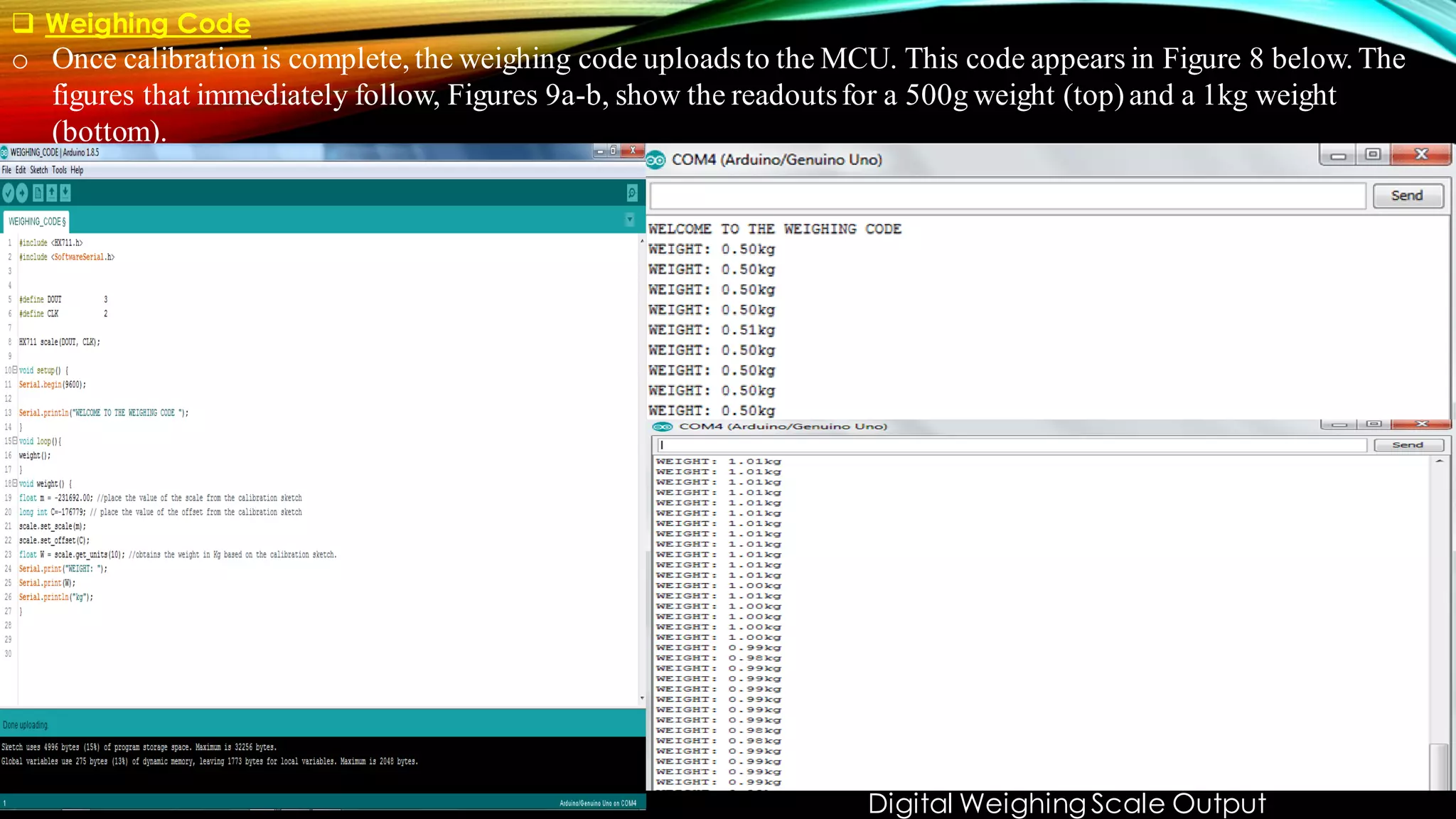
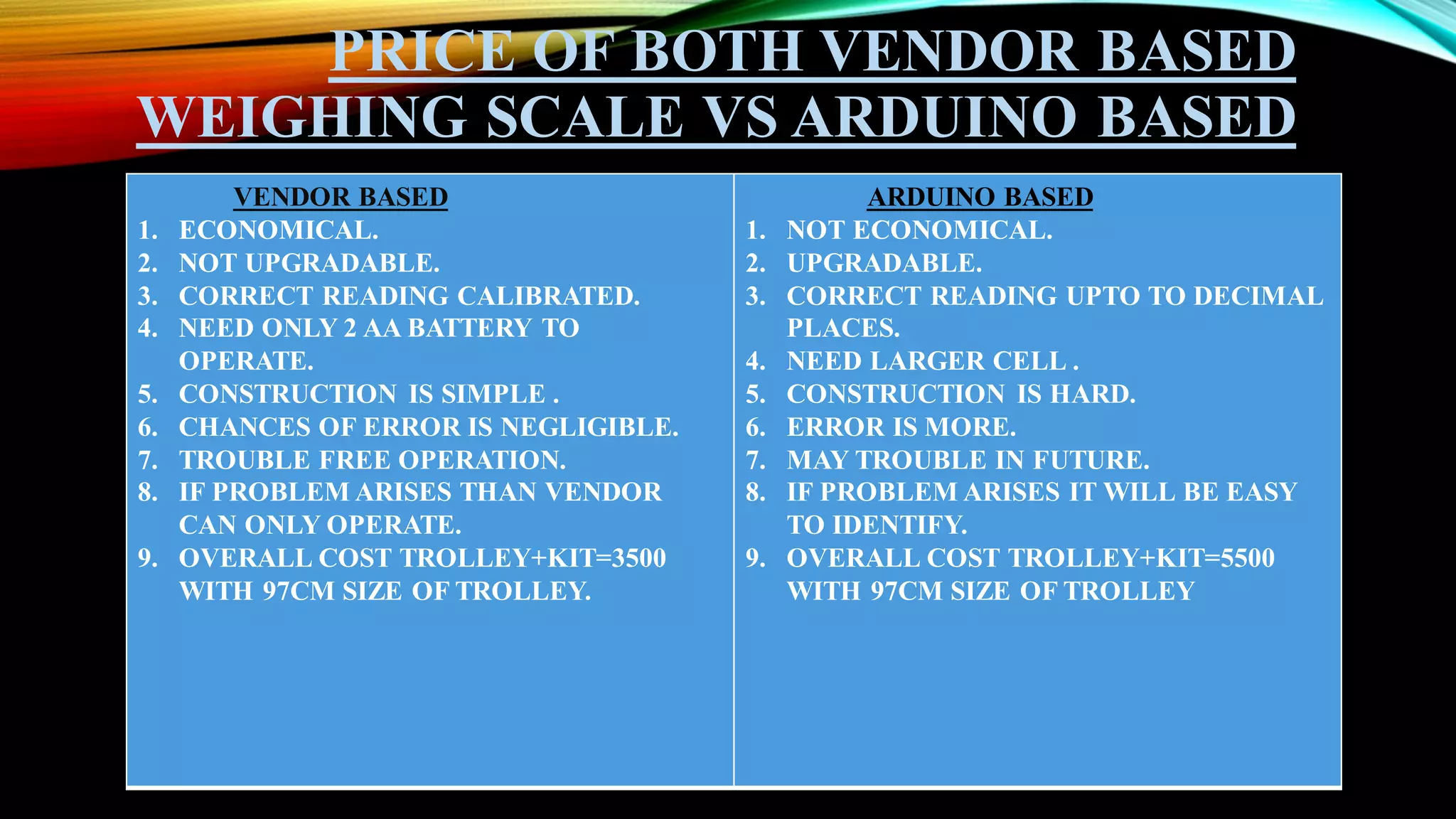
The document describes the development of an inbuilt weighing device for travel bags by a team named 'Let's Do It' from the Sant Longowal Institute of Engineering and Technology. The device aims to address the common problem of luggage weight measurement, utilizing a digital weighing system based on strain gauge load cells and Arduino technology, with a competitive analysis on vendor-based versus Arduino-based scales. The project supports the 'Make in India' initiative, contributing to job creation and showcasing a dedication to technological innovation in the luggage industry.