Build a gesture controlled robotic arm using LPC2378 microcontroller based on ARM v4, MPU 9150 for gesture sensing, Zigbee module for wireless communication between sensor and the microcontroller
This was my final year project based on embedded system
this is the code
http://downloads..com/download/24001476/code.rar.html
and the pcb are
http://downloads..com/download/24001498/pcb.rar.html
This was my final year project based on embedded system
this is the code
http://downloads..com/download/24001476/code.rar.html
and the pcb are
http://downloads..com/download/24001498/pcb.rar.html
Lfr based inventory contol using forkliftNITISH KUMAR
Project on LFR based inventory control system using a forklift.
In this we have made a line follower robot which follows a fixed path for its working and it mainly carry/lift heavy or harmful materials from one place to another in an industry. The robot no only carries materials but it also distinguishes between different materials based on their color or weight and then follows a proper path for stacking them differently in a proper manner.
The aim of this project is to controlling a wheel chair and electrical devices by using MEMS accelerometer sensor (Micro Electro-Mechanical Systems) technology. MEMS accelerometer sensor is a Micro Electro Mechanical Sensor which is a highly sensitive sensor and capable of detecting the tilt. This sensor finds the tilt and makes use of the accelerometer to change the direction of the wheel chair depending on tilt. For example if the tilt is to the right side then the wheel chair moves in right direction or if the tilt is to the left side then the wheel chair moves in left direction. Wheel chair movement can be controlled in Forward, Reverse, and Left and Right direction.
Arduino Workshop 5th session
(NOW YOU CAN BUILD YOUR OWN CAR :D )
In this session, you will learn
- How to use the Ultrasonic sensor.
- What is the motor gearbox?
- L298N H-Bridge.
- Revision on functions in C languages.
Project is used to control the robotic vehicle using RF remote operation. Low power laser beam light is interfaced with microcontroller for desired operation
IOT based project for accident victims,where the message is directly sent to the nearby ambulance, and the traffic is maintained on the basis of the fact that whether an ambulance is present on the road or not.
The objective of this project is to provide an enhancement in the current railway system. This project is basically divided into two modules depending on its working.
The 1st module will provide an automatic railway gate at a level crossing replacing the gates operated by the gatekeeper. It deals with two things: Firstly, it deals with the reduction of time for which the gate is being kept closed and secondly, to provide safety to the road users by reducing railway accidents and also gives a prior intimation to the driver if any vehicle is stuck on the track during the train arrival so that the driver can take necessary precautions.
The 2nd module will deal with a container which will be placed below the entire lavatories which will automatically detect the platform and get closed to maintain the cleanliness of the platform. Next as soon the train will pass the station the container will get open to propel the slurry contains somewhere outside the station.
Lfr based inventory contol using forkliftNITISH KUMAR
Project on LFR based inventory control system using a forklift.
In this we have made a line follower robot which follows a fixed path for its working and it mainly carry/lift heavy or harmful materials from one place to another in an industry. The robot no only carries materials but it also distinguishes between different materials based on their color or weight and then follows a proper path for stacking them differently in a proper manner.
The aim of this project is to controlling a wheel chair and electrical devices by using MEMS accelerometer sensor (Micro Electro-Mechanical Systems) technology. MEMS accelerometer sensor is a Micro Electro Mechanical Sensor which is a highly sensitive sensor and capable of detecting the tilt. This sensor finds the tilt and makes use of the accelerometer to change the direction of the wheel chair depending on tilt. For example if the tilt is to the right side then the wheel chair moves in right direction or if the tilt is to the left side then the wheel chair moves in left direction. Wheel chair movement can be controlled in Forward, Reverse, and Left and Right direction.
Arduino Workshop 5th session
(NOW YOU CAN BUILD YOUR OWN CAR :D )
In this session, you will learn
- How to use the Ultrasonic sensor.
- What is the motor gearbox?
- L298N H-Bridge.
- Revision on functions in C languages.
Project is used to control the robotic vehicle using RF remote operation. Low power laser beam light is interfaced with microcontroller for desired operation
IOT based project for accident victims,where the message is directly sent to the nearby ambulance, and the traffic is maintained on the basis of the fact that whether an ambulance is present on the road or not.
The objective of this project is to provide an enhancement in the current railway system. This project is basically divided into two modules depending on its working.
The 1st module will provide an automatic railway gate at a level crossing replacing the gates operated by the gatekeeper. It deals with two things: Firstly, it deals with the reduction of time for which the gate is being kept closed and secondly, to provide safety to the road users by reducing railway accidents and also gives a prior intimation to the driver if any vehicle is stuck on the track during the train arrival so that the driver can take necessary precautions.
The 2nd module will deal with a container which will be placed below the entire lavatories which will automatically detect the platform and get closed to maintain the cleanliness of the platform. Next as soon the train will pass the station the container will get open to propel the slurry contains somewhere outside the station.
Hand movement controlled robotic vehicle which can be controlled by simple gestures. The user just needs to wear a gesture device which includes a sensor. The sensor will record the movement of hand in a specific direction which will result in the movement of the robot in the respective direction. The robot and the Gesture device are connected wirelessly via radio waves. The wireless communication enables the user to interact with the robot in a more friendly way.
A short PowerPoint presentation on robotic arm, its features and its development. Contains a video explanation, please download to watch it....Thanks for watching.
Servo Based 5 Axis Robotic Arm Project ReportRobo India
Robo India presents a project report on servo motor based 5 axis robotic arm.
This project is operated through PC software that is made in Visual Basic. AVR family's Atmel Atmega 8 is used in controller board, it runs on Arduino IDE platform.
Detailed mechnical drawings of all of the parts are also given.
We welcome all of your views and queries.
Thanks & Regards
Team Robo India
www.roboindia.com
info@roboindia.com
Robotic Arm using flex sensor and servo motorjovin Richard
A robotic arm is a type of mechanical arm, usually programmable, with similar functions to a human arm; the arm may be the sum total of the mechanism or may be part of a more complex robot. we have used FLEX SENSOR for the inuput and SERVO MOTOR as output for the movement. Motor Driver L293D is used to increase the power. atmega8 is used here.
Haptic gloves controlled robotic arm using MEMS accelerometerijiert bestjournal
Robots of the current generation have been used in fields isolated from the human society. The definitions of robotics are numerous and varied,ultimately they all deal with a labour - saving machine that with increasing technological capabilities gets clos er and closer to human mechanical and mental capabilities. In order to represent the robotic technology in the field of human - machine interaction and wireless communication for allows interactivity in real - time with virtual objects it is very necessary to develop some or the other technology that makes the maximum use of robot to help people do their work in an efficient way in their day to day life . The main objective of the project is to design and develop the Robot that is used to move using wireless sys tem by recognizing hand motion that is controlled by haptics technology for virtual environment & human - machine systems capable of haptic interaction.
Monitoring and Control System for Building Application Using Modbus Remote Te...IJITCA Journal
This paper presents the design of a monitoring and control system that will be installed in buildings and
used as a building management system for monitoring dan controlling mechanical and electrical devices
embedded in the building.
The system implements the master slave RS485 multidrop configuration. The system hardware consists of
sensor, controller, and actuator. Arduino board with AT Mega series microcontroller unit (MCU) is used
as controller. MCU’s ADC will be used as sensor. MODBUS remote terminal unit is used as protocol and
implemented inside the master and slave progam inside the MCU.
At the end of this paper, the result of transmission with various baud rate setting, various cable length,
multiple message frames and are presented.
Abstract: Haptics is the science of applying touch sensation and control for interaction with virtual or physical application. In this project, our aim is to make a robotic arm that will copy the actual movements of a human hand. Motion of the hand will vary the potentiometer resistance which is placed on the human arm. This change in resistance produces an equivalent output voltage which is given to the microcontroller. The microcontroller converts this analog signal to digital and produces corresponding PWM signals which are required for the servomotors on the robotic arm to run. Servomotors are connected to the receiver microcontroller. PWM pulses are sent to the receiver controller. The hardware of this project is very user friendly, portable, easy to handle and also very light in weight. It has a very simple design and also very easy to assemble. We have used 5 Degrees of Freedom i.e. Shoulder, Elbow, Wrist and Finger
Real-Time Monitoring and Control System for Industryijsrd.com
Industrial automation and control systems become an integral part of industries and hence the project Real-Time Monitoring and Control System is an important system. Real-Time Monitoring and Controlling System aims to monitor the environmental parameters like Temperature, Humidity, Pressure statistics in any factory and controlling peripheral systems also transmit parameter wireless to the Monitoring room using Zigbee Technology. It uses ARM 7 based embedded technologies from NXP which is sister company of Philips and made for used in highly sensitive and critical Real Time systems.
Ijeee 33-36-surveillance system for coal mines based on wireless sensor networkKumar Goud
Abstract: The foremost critical task for coal mine is of keeping track of miners spread out across a large mining areas .It becomes even difficult when mine tunnels collapse. Many mines use a radio system to track miners, but when a collapse occurs, the base stations connected by a thin wire often are rendered useless. In this project to overcome the demerits of radio system we used wireless technology for tracking the miners. For this purpose a small RF transmitter module is equipped to each person entering a mine. Each transceiver placed in the mine look after the location of miners. The transceivers communicate with base stations through Zigbee module. In addition of tracking the location of miners we also include sensors such as temperature & humidity to intimate the base station & miners when some atmosphere changes occur. Mine operators are now able to monitor the real-time locations of each miner to better pinpoint their locations in the event of an emergency. Even after a full-day of use, mine operators can locate an individual miner within ten feet.
Key Words: Wireless sensor networks (WSN), ZIGBEE, and LPC2148.
Design and Implementation of Payload Camera Control System for Unmanned Aeria...ijtsrd
The aim of this research is to design and implement PIC based radio frequency wireless communication system of two axes Pan Tilt payload camera unit for UAV. Camera is used as a payload and two servo motors are used to adjust the camera positioner in two axes to take the desired photo. User interface program is designed by C language on personal computer and serial communication RS232 protocol is used for data communication between personal computer and microcontroller. SONY digital camera is used to take the desired photographs and store recorded data to its memory. Ultra High Frequency band radio frequency wireless transmitter and receiver pairs are used for data communication link between the ground station and the receiver on the vehicle. And they are Amplitude Shift Keying ASK type IC and transmission frequency is 433.92MHZ. The Futaba S3003 servo motors mounted on the payload are driven by PWM pulse related to the transmitted data from the transmitter in order to get the desire payload camera orientation. The control system is based on microcontroller PIC16F877A. The microcontroller CCS C language is used for this control system. Saw Aung Nyein Oo | Naw Octavia "Design and Implementation of Payload (Camera) Control System for Unmanned Aerial Vehicle" Published in International Journal of Trend in Scientific Research and Development (ijtsrd), ISSN: 2456-6470, Volume-3 | Issue-5 , August 2019, URL: https://www.ijtsrd.com/papers/ijtsrd26781.pdf Paper URL: https://www.ijtsrd.com/engineering/electronics-and-communication-engineering/26781/design-and-implementation-of-payload-camera-control-system-for-unmanned-aerial-vehicle/saw-aung-nyein-oo
The peer-reviewed International Journal of Engineering Inventions (IJEI) is started with a mission to encourage contribution to research in Science and Technology. Encourage and motivate researchers in challenging areas of Sciences and Technology.
DC Motor Drive System (Cascade Control Strategy)Rishikesh Bagwe
- Controlled the speed of a DC motor using cascaded current and speed PI controllers
- Root Locus Analysis was used to determine the controller gains
- Faster transient response with zero steady - state error was achieved
QNET Heating Ventilation and Air Conditioning in LABVIEW & Strain GuagesRishikesh Bagwe
- Studied the wiring diagram of PI and ON-OFF controller implemented in LabVIEW and analysed its effects
- Interfaced strain gauge sensor with LabVIEW software via NI ELVIS for weight measurement
Dynamic Matrix Control (DMC) on jacket tank heater - Rishikesh BagweRishikesh Bagwe
The Dynamic Matrix Control (DMC) method of Model Predictive Control was simulated in MATLAB on Jacketed Tank Heater. The characteristics of the liquid being controlled are height and temperature
Industrial Training at Shahjalal Fertilizer Company Limited (SFCL)MdTanvirMahtab2
This presentation is about the working procedure of Shahjalal Fertilizer Company Limited (SFCL). A Govt. owned Company of Bangladesh Chemical Industries Corporation under Ministry of Industries.
COLLEGE BUS MANAGEMENT SYSTEM PROJECT REPORT.pdfKamal Acharya
The College Bus Management system is completely developed by Visual Basic .NET Version. The application is connect with most secured database language MS SQL Server. The application is develop by using best combination of front-end and back-end languages. The application is totally design like flat user interface. This flat user interface is more attractive user interface in 2017. The application is gives more important to the system functionality. The application is to manage the student’s details, driver’s details, bus details, bus route details, bus fees details and more. The application has only one unit for admin. The admin can manage the entire application. The admin can login into the application by using username and password of the admin. The application is develop for big and small colleges. It is more user friendly for non-computer person. Even they can easily learn how to manage the application within hours. The application is more secure by the admin. The system will give an effective output for the VB.Net and SQL Server given as input to the system. The compiled java program given as input to the system, after scanning the program will generate different reports. The application generates the report for users. The admin can view and download the report of the data. The application deliver the excel format reports. Because, excel formatted reports is very easy to understand the income and expense of the college bus. This application is mainly develop for windows operating system users. In 2017, 73% of people enterprises are using windows operating system. So the application will easily install for all the windows operating system users. The application-developed size is very low. The application consumes very low space in disk. Therefore, the user can allocate very minimum local disk space for this application.
Overview of the fundamental roles in Hydropower generation and the components involved in wider Electrical Engineering.
This paper presents the design and construction of hydroelectric dams from the hydrologist’s survey of the valley before construction, all aspects and involved disciplines, fluid dynamics, structural engineering, generation and mains frequency regulation to the very transmission of power through the network in the United Kingdom.
Author: Robbie Edward Sayers
Collaborators and co editors: Charlie Sims and Connor Healey.
(C) 2024 Robbie E. Sayers
CFD Simulation of By-pass Flow in a HRSG module by R&R Consult.pptxR&R Consult
CFD analysis is incredibly effective at solving mysteries and improving the performance of complex systems!
Here's a great example: At a large natural gas-fired power plant, where they use waste heat to generate steam and energy, they were puzzled that their boiler wasn't producing as much steam as expected.
R&R and Tetra Engineering Group Inc. were asked to solve the issue with reduced steam production.
An inspection had shown that a significant amount of hot flue gas was bypassing the boiler tubes, where the heat was supposed to be transferred.
R&R Consult conducted a CFD analysis, which revealed that 6.3% of the flue gas was bypassing the boiler tubes without transferring heat. The analysis also showed that the flue gas was instead being directed along the sides of the boiler and between the modules that were supposed to capture the heat. This was the cause of the reduced performance.
Based on our results, Tetra Engineering installed covering plates to reduce the bypass flow. This improved the boiler's performance and increased electricity production.
It is always satisfying when we can help solve complex challenges like this. Do your systems also need a check-up or optimization? Give us a call!
Work done in cooperation with James Malloy and David Moelling from Tetra Engineering.
More examples of our work https://www.r-r-consult.dk/en/cases-en/
Student information management system project report ii.pdfKamal Acharya
Our project explains about the student management. This project mainly explains the various actions related to student details. This project shows some ease in adding, editing and deleting the student details. It also provides a less time consuming process for viewing, adding, editing and deleting the marks of the students.
About
Indigenized remote control interface card suitable for MAFI system CCR equipment. Compatible for IDM8000 CCR. Backplane mounted serial and TCP/Ethernet communication module for CCR remote access. IDM 8000 CCR remote control on serial and TCP protocol.
• Remote control: Parallel or serial interface.
• Compatible with MAFI CCR system.
• Compatible with IDM8000 CCR.
• Compatible with Backplane mount serial communication.
• Compatible with commercial and Defence aviation CCR system.
• Remote control system for accessing CCR and allied system over serial or TCP.
• Indigenized local Support/presence in India.
• Easy in configuration using DIP switches.
Technical Specifications
Indigenized remote control interface card suitable for MAFI system CCR equipment. Compatible for IDM8000 CCR. Backplane mounted serial and TCP/Ethernet communication module for CCR remote access. IDM 8000 CCR remote control on serial and TCP protocol.
Key Features
Indigenized remote control interface card suitable for MAFI system CCR equipment. Compatible for IDM8000 CCR. Backplane mounted serial and TCP/Ethernet communication module for CCR remote access. IDM 8000 CCR remote control on serial and TCP protocol.
• Remote control: Parallel or serial interface
• Compatible with MAFI CCR system
• Copatiable with IDM8000 CCR
• Compatible with Backplane mount serial communication.
• Compatible with commercial and Defence aviation CCR system.
• Remote control system for accessing CCR and allied system over serial or TCP.
• Indigenized local Support/presence in India.
Application
• Remote control: Parallel or serial interface.
• Compatible with MAFI CCR system.
• Compatible with IDM8000 CCR.
• Compatible with Backplane mount serial communication.
• Compatible with commercial and Defence aviation CCR system.
• Remote control system for accessing CCR and allied system over serial or TCP.
• Indigenized local Support/presence in India.
• Easy in configuration using DIP switches.
Courier management system project report.pdfKamal Acharya
It is now-a-days very important for the people to send or receive articles like imported furniture, electronic items, gifts, business goods and the like. People depend vastly on different transport systems which mostly use the manual way of receiving and delivering the articles. There is no way to track the articles till they are received and there is no way to let the customer know what happened in transit, once he booked some articles. In such a situation, we need a system which completely computerizes the cargo activities including time to time tracking of the articles sent. This need is fulfilled by Courier Management System software which is online software for the cargo management people that enables them to receive the goods from a source and send them to a required destination and track their status from time to time.
Event Management System Vb Net Project Report.pdfKamal Acharya
In present era, the scopes of information technology growing with a very fast .We do not see any are untouched from this industry. The scope of information technology has become wider includes: Business and industry. Household Business, Communication, Education, Entertainment, Science, Medicine, Engineering, Distance Learning, Weather Forecasting. Carrier Searching and so on.
My project named “Event Management System” is software that store and maintained all events coordinated in college. It also helpful to print related reports. My project will help to record the events coordinated by faculties with their Name, Event subject, date & details in an efficient & effective ways.
In my system we have to make a system by which a user can record all events coordinated by a particular faculty. In our proposed system some more featured are added which differs it from the existing system such as security.
Immunizing Image Classifiers Against Localized Adversary Attacksgerogepatton
This paper addresses the vulnerability of deep learning models, particularly convolutional neural networks
(CNN)s, to adversarial attacks and presents a proactive training technique designed to counter them. We
introduce a novel volumization algorithm, which transforms 2D images into 3D volumetric representations.
When combined with 3D convolution and deep curriculum learning optimization (CLO), itsignificantly improves
the immunity of models against localized universal attacks by up to 40%. We evaluate our proposed approach
using contemporary CNN architectures and the modified Canadian Institute for Advanced Research (CIFAR-10
and CIFAR-100) and ImageNet Large Scale Visual Recognition Challenge (ILSVRC12) datasets, showcasing
accuracy improvements over previous techniques. The results indicate that the combination of the volumetric
input and curriculum learning holds significant promise for mitigating adversarial attacks without necessitating
adversary training.
Hybrid optimization of pumped hydro system and solar- Engr. Abdul-Azeez.pdffxintegritypublishin
Advancements in technology unveil a myriad of electrical and electronic breakthroughs geared towards efficiently harnessing limited resources to meet human energy demands. The optimization of hybrid solar PV panels and pumped hydro energy supply systems plays a pivotal role in utilizing natural resources effectively. This initiative not only benefits humanity but also fosters environmental sustainability. The study investigated the design optimization of these hybrid systems, focusing on understanding solar radiation patterns, identifying geographical influences on solar radiation, formulating a mathematical model for system optimization, and determining the optimal configuration of PV panels and pumped hydro storage. Through a comparative analysis approach and eight weeks of data collection, the study addressed key research questions related to solar radiation patterns and optimal system design. The findings highlighted regions with heightened solar radiation levels, showcasing substantial potential for power generation and emphasizing the system's efficiency. Optimizing system design significantly boosted power generation, promoted renewable energy utilization, and enhanced energy storage capacity. The study underscored the benefits of optimizing hybrid solar PV panels and pumped hydro energy supply systems for sustainable energy usage. Optimizing the design of solar PV panels and pumped hydro energy supply systems as examined across diverse climatic conditions in a developing country, not only enhances power generation but also improves the integration of renewable energy sources and boosts energy storage capacities, particularly beneficial for less economically prosperous regions. Additionally, the study provides valuable insights for advancing energy research in economically viable areas. Recommendations included conducting site-specific assessments, utilizing advanced modeling tools, implementing regular maintenance protocols, and enhancing communication among system components.
Explore the innovative world of trenchless pipe repair with our comprehensive guide, "The Benefits and Techniques of Trenchless Pipe Repair." This document delves into the modern methods of repairing underground pipes without the need for extensive excavation, highlighting the numerous advantages and the latest techniques used in the industry.
Learn about the cost savings, reduced environmental impact, and minimal disruption associated with trenchless technology. Discover detailed explanations of popular techniques such as pipe bursting, cured-in-place pipe (CIPP) lining, and directional drilling. Understand how these methods can be applied to various types of infrastructure, from residential plumbing to large-scale municipal systems.
Ideal for homeowners, contractors, engineers, and anyone interested in modern plumbing solutions, this guide provides valuable insights into why trenchless pipe repair is becoming the preferred choice for pipe rehabilitation. Stay informed about the latest advancements and best practices in the field.
The Benefits and Techniques of Trenchless Pipe Repair.pdf
Gesture controlled robotic arm embedded systems project
1. Project Report
Gesture Controlled Robotic Arm
Objective:
To design a gesture controlled robotic arm that maps the user hand movements.
The arm would be able to move in all the 3 dimensions
It would be wirelessly controlled
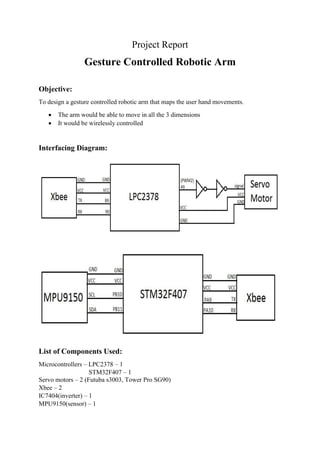
Interfacing Diagram:
List of Components Used:
Microcontrollers – LPC2378 – 1
STM32F407 – 1
Servo motors – 2 (Futuba s3003, Tower Pro SG90)
Xbee – 2
IC7404(inverter) – 1
MPU9150(sensor) – 1
2. Outcome:
We are able to run the motors by generating a PWM in LPC2378
The communication between the 2 Xbees is established
We are able to transfer values from the Xbee near STM32 to a variable in LPC2378
The communication between STM32F407 and the Xbee via UART is working
Conclusion:
The communication between STM32f407 and LPC2378 is established wirelessly via XBee
modules (using ZigBee protocol) and the commands are being transmitted to the
corresponding servos for their operation.