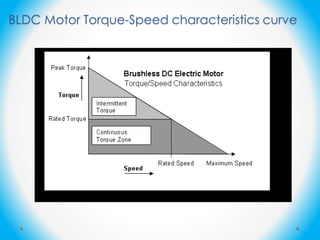
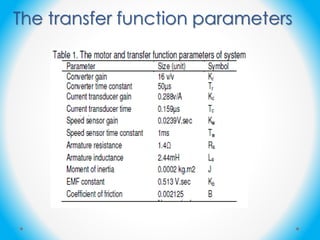
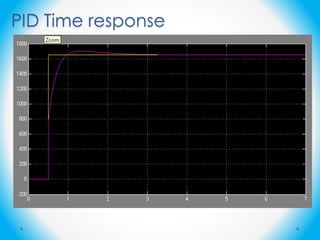
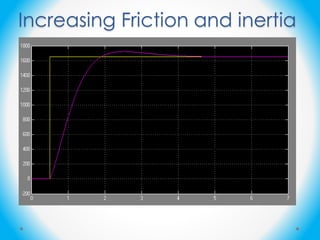
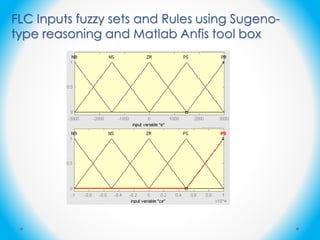
This document describes the development of an integrated fuzzy logic controller (IFLC) for controlling the rotation speed of a brushless DC servomotor. The IFLC takes the error and change in error as inputs and provides a single output to control the motor speed. Both proportional-integral-derivative (PID) and fuzzy logic controllers are integrated in the IFLC design. Simulation results show that the IFLC provides better performance than the PID controller or a conventional fuzzy logic controller alone. Further improvements could be made by adding an additional input for the change in change of error to the IFLC.



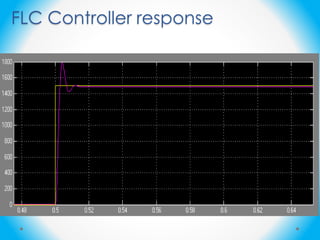
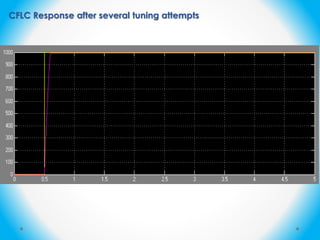
![FLC Controller
Cd k= 1*10^(-14), Cd k1= 1000, Sat=[-6000, 6000] (optimal response)](https://image.slidesharecdn.com/fuzzymotor-160207202325/85/Fuzzy-motor-16-320.jpg)
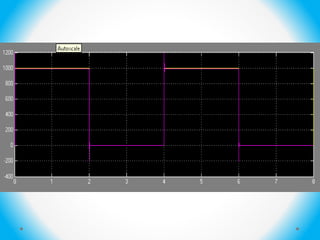
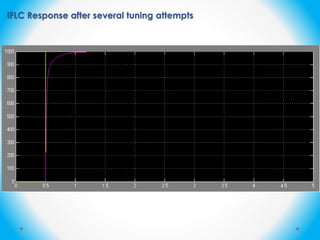
![IFLC Controller
Cd k= 1*10^(-14), Sat=[-1000, 1000], C-S: Kp= 30, KI= 88.107, Kd=1.00
C-C: Kp=1.00, Ki= 350.941 (optimal response)](https://image.slidesharecdn.com/fuzzymotor-160207202325/85/Fuzzy-motor-21-320.jpg)












![[000007]](https://cdn.slidesharecdn.com/ss_thumbnails/000007-211028000533-thumbnail.jpg?width=640&height=640&fit=bounds)