Downloaded 100 times

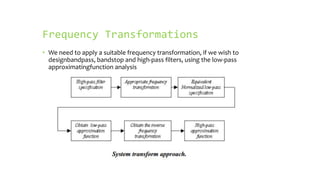
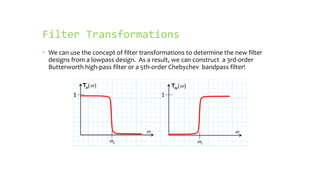
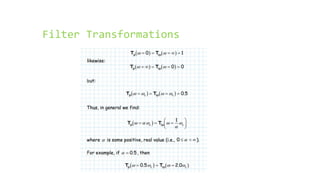
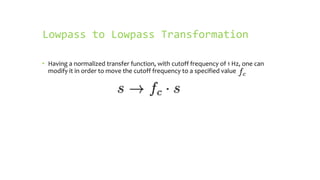
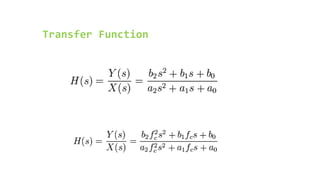
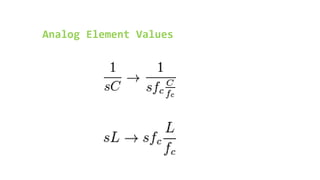
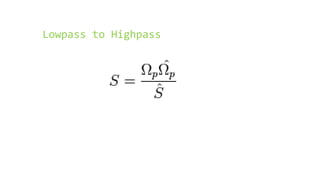
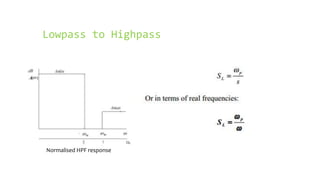
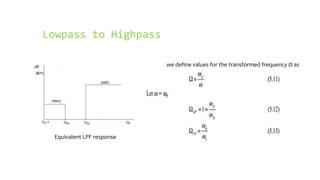
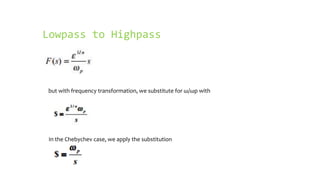


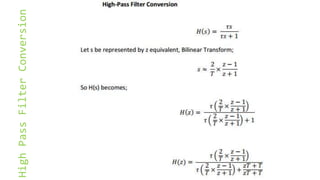

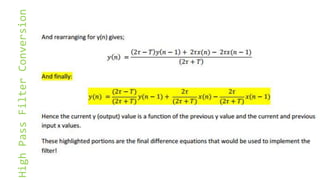

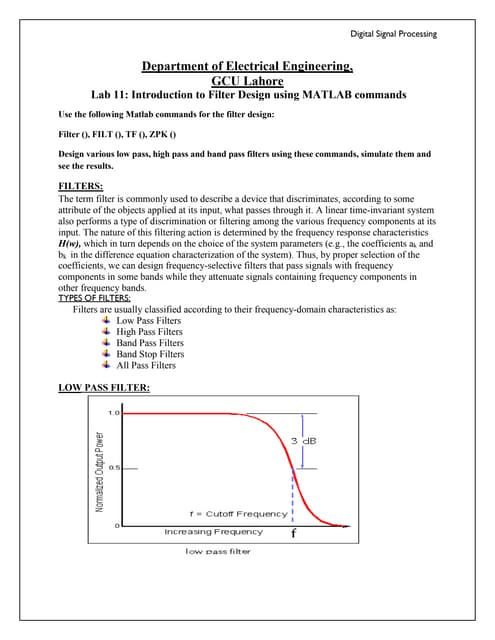
This document discusses frequency transformations that can be used to design bandpass, bandstop, and high-pass filters based on a low-pass filter design. It explains that filters can be transformed from low-pass to other types by applying a suitable frequency transformation. Common transformations include applying substitutions to move the cutoff frequency or replace the frequency variable to transform the response from low-pass to high-pass. The transformations allow filters to be designed by first specifying a normalized low-pass filter and then transforming it.











![Digital Signal Processing[ECEG-3171]-Ch1_L02](https://cdn.slidesharecdn.com/ss_thumbnails/dspl2-180427094423-thumbnail.jpg?width=640&height=640&fit=bounds)