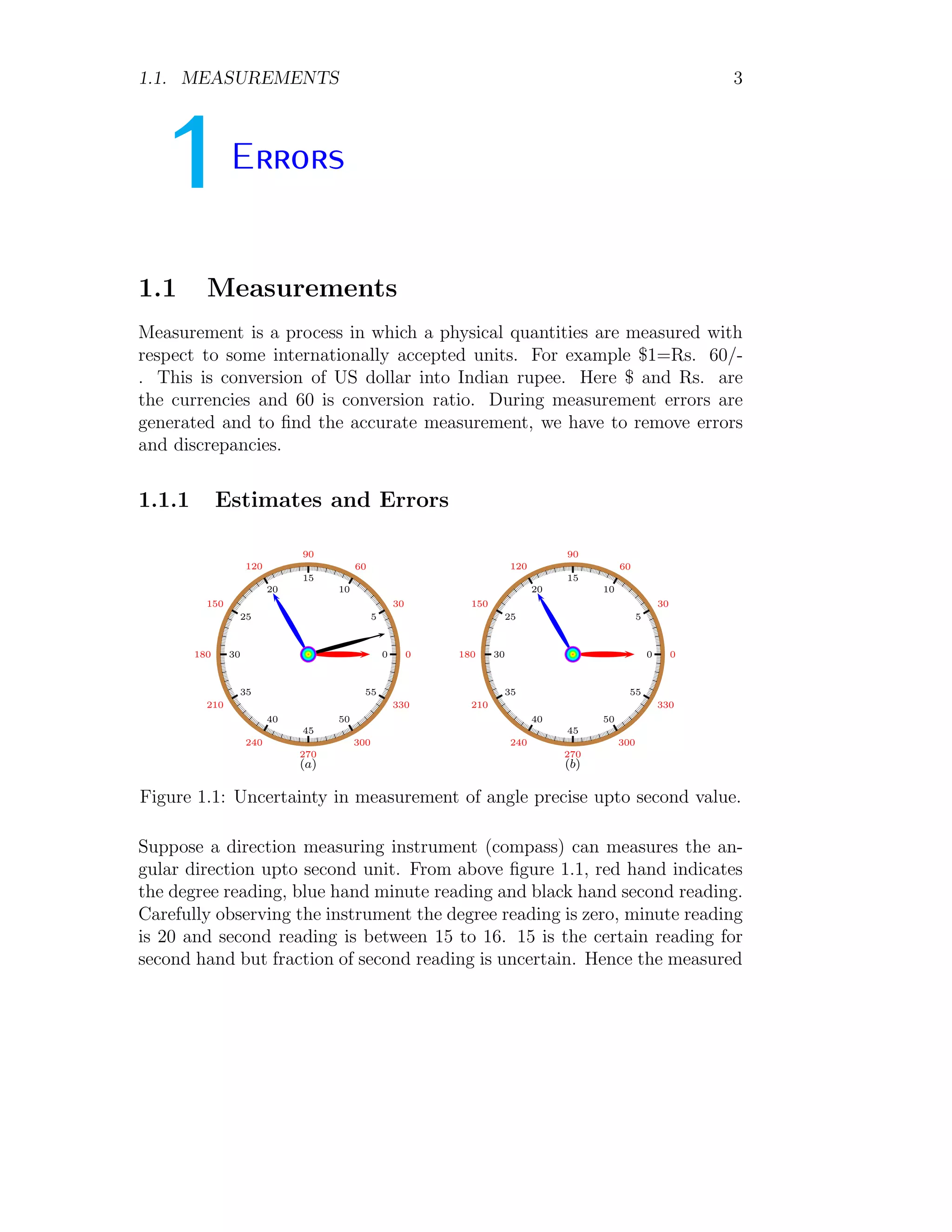
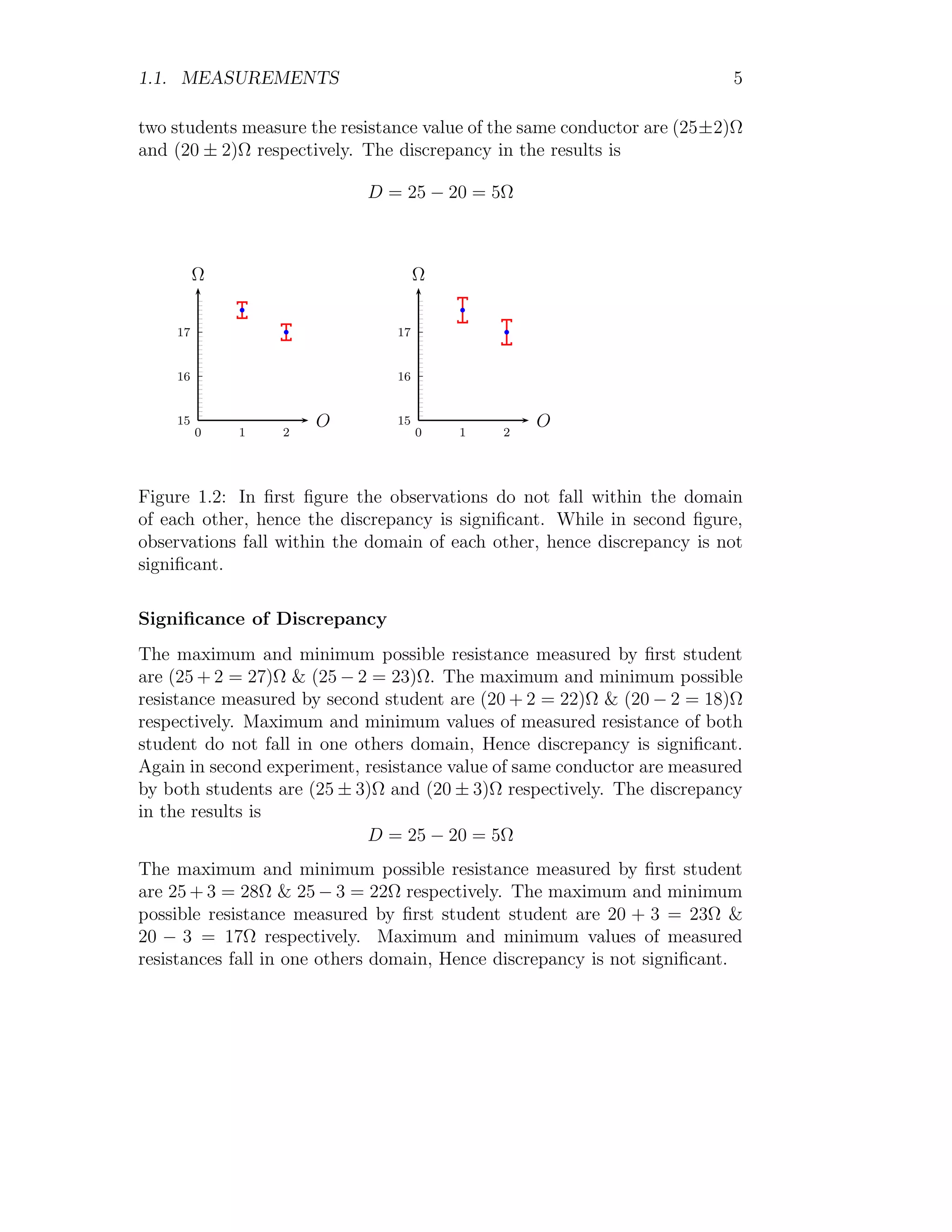
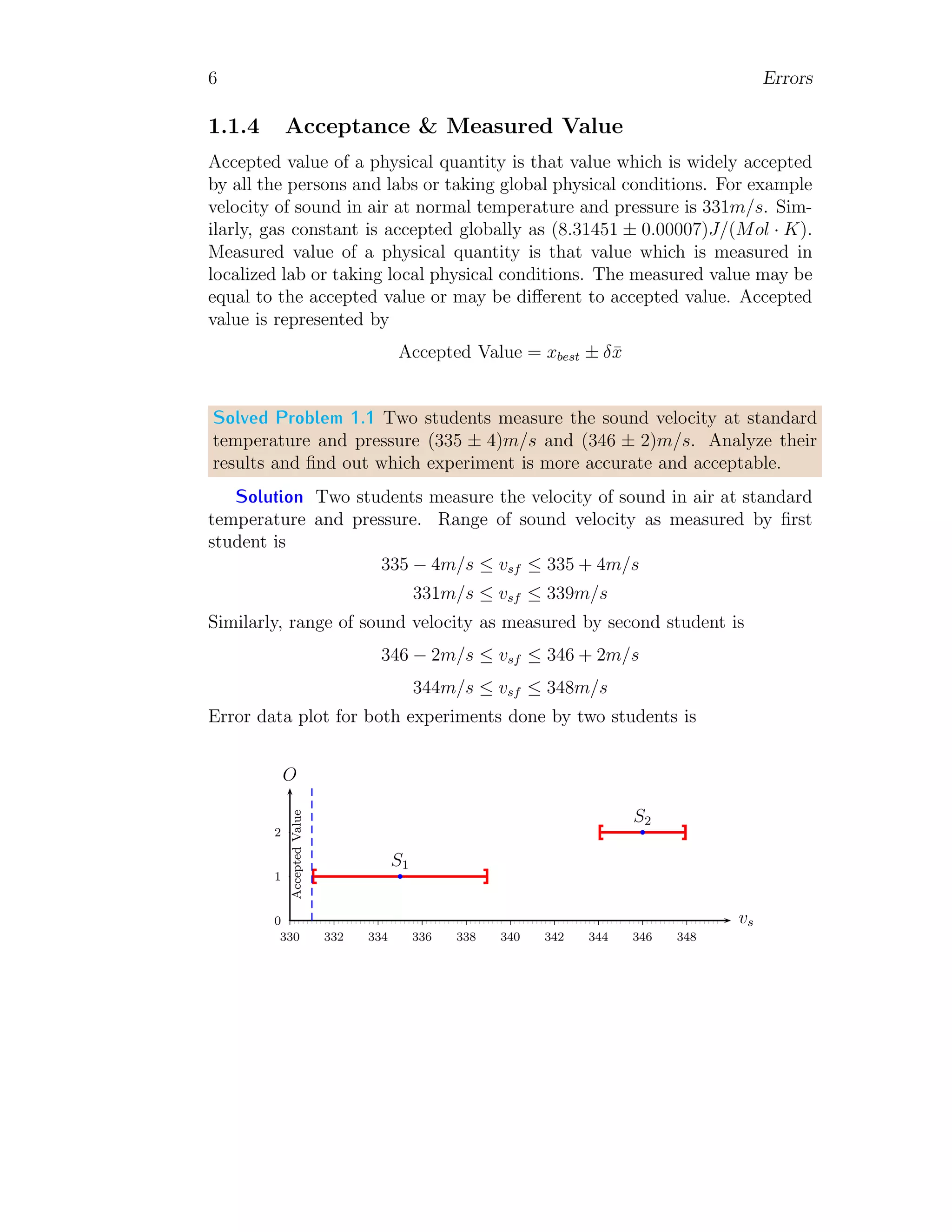
The document discusses error measurement in scientific contexts, emphasizing the definitions and classifications of errors such as systematic, random, and observational errors. It explains how to measure accuracy and precision, with examples illustrating discrepancies in measurements from different observers. The text concludes by highlighting that errors are absolute and additive, regardless of the operations applied (addition, subtraction, etc.).