Downloaded 10 times
![Shreyas M.S, Prof. D. Jayaramaiah / International Journal of Engineering Research and
Applications (IJERA) ISSN: 2248-9622 www.ijera.com
Vol. 3, Issue 4, Jul-Aug 2013, pp.765-771
765 | P a g e
Anti-Void Traversal Mechanism Using Pressure Routing For
Underwater Sensor Networks
Shreyas M.S1
, Prof. D. Jayaramaiah2
1
M.Tech Student,
2
Head of the dept,
Department of Information Science Engineering The Oxford College of Engineering VTU Bangalore, India
Abstract
Underwater acoustic sensor networks
have recently been proposed as a way to explore
and capture oceanographic data to monitor
underwater environments. A specialized
geographic routing problem called pressure
routing that directs a packet to any sonobuoys on
the surface based on depth information available
from on-board pressure gauges. In this respect,
the efficient handling of void areas in the acoustic
network is the main challenge of pressure
routing. It was recently proven that the greedy
stateless perimeter routing method, very popular
in terrestrial networks, cannot be extended to
void recovery in acoustic networks. In order to
remedy this problem, the existing protocol Depth
based routing is enhanced. The proposed solution
takes advantage of what is already inherited as a
natural part of geographic routing to provide
clues on the routing direction for data packets
with minimal overhead to navigate around the
voids. The proposed solution that uses depth
information, sequence number and hop count
and exploits opportunistic beacon packet
receptions to circumvent void areas and
efficiently progress towards the destination when
choosing forwarding nodes the proposed solution
follows this direction by embedding small
amounts of trace routing data in each beaconing
packet to inform neighboring nodes about the
broadcasting node’s status as a local maxima or
dead end node and avoid routing to nodes which
may lead to a void in the network.
Index Terms— Pressure Routing, Geographic
Routing, Opportunistic data forwarding, Any-cast
Routing.
I. INTRODUCTION
Underwater sensor networks (UWSNs)
communications are becoming increasingly
important, with numerous applications emerging in
military tactical surveillance applications,
oceanographic data collection environmental and
pollution monitoring [1], [2]. Underwater acoustic
networking is the enabling technology for these
applications. In underwater networks, to perform
collaborative monitoring tasks over a given area a
variable number of sensors and vehicles that are
deployed forming a sea Swarm (Sensor Equipped
Aquatic Swarm) that moves as a group with water
current [3], [4]. Each sensor is equipped with a low
bandwidth acoustic modem and with various sensors
(e.g., Drogues [5]). Moreover, it can control its
depth through a fish-like bladder apparatus and a
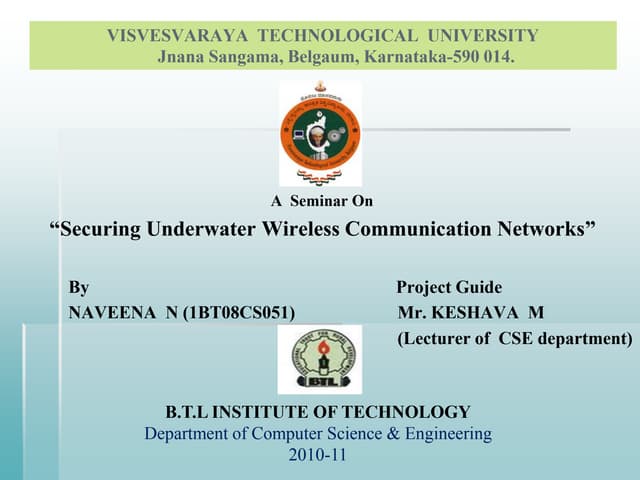
pressure gauge. The swarm is escorted by sonobuoys
at the sea surface that are equipped with both
acoustic and radio (e.g., Wi-Fi or Satellites)
communications and GPS (See Fig 1).
Fig 1: Sea swarm architecture
Our goal in this paper is to design an
efficient any cast routing protocol for underwater
data collection that addresses several challenges that
are unique to underwater communications like the
underwater acoustic channel is prone to packet
losses and severely constrained by long propagation
latency and low bandwidth (usually less than
100Kbps) [16] and collisions in a congested
network. Energy efficiency is a critical factor as
well, given that acoustic transmissions consume far
more energy than terrestrial radio communications
(reception to transmission power ratio of 1:125
[17]).
The existing terrestrial routing protocols
(e.g., OLSR [14], DSDV [12], AODV [11], DSR
[13]) can be modified in mobile underwater
networks to support any-cast routing. This approach
has few shortcomings: (1) it is challenging to
incorporate opportunistic forwarding mechanisms
(e.g., ExOR [9], LCOR [10]) into the stateful routing
protocols due to node mobility (2) these protocols
require frequent systematic flooding and route](https://image.slidesharecdn.com/dz34765771-130706050221-phpapp02/75/Dz34765771-1-2048.jpg)
![Shreyas M.S, Prof. D. Jayaramaiah / International Journal of Engineering Research and
Applications (IJERA) ISSN: 2248-9622 www.ijera.com
Vol. 3, Issue 4, Jul-Aug 2013, pp.765-771
766 | P a g e
maintenance with neighboring nodes, which are very
expensive operations under water.
In Acoustic networks, recent researches
has been directed to geographic routing because it
does not require any link state exchanges or route
maintenances (i.e., stateless and localized). Another
key advantage of geographic routing is that it
enables localized geo-opportunistic forwarding; i.e.,
a subset of nodes that have correctly received the
packet can collaboratively schedule a packet
transmission to maximize its progress toward the
destination [15]. Note that our geographic routing
problem is specialized in that it is any-cast to any
buoy on the surface. Thus, it suffices to route a
packet upwards to shallower depths. Given that the
onboard hydraulic pressure gauge can accurately
estimate depth (avg. error < 1m ), we can use depth
information for geographic any-cast routing (called
pressure routing).
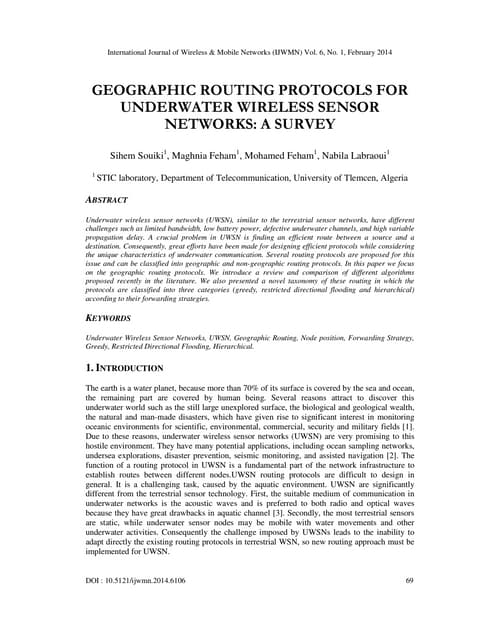
A simple greedy pressure routing often fails
in sparse underwater networks due to the presence
of void Nodes — packets must be routed around
such routing holes. As depicted in Fig. 2, a data
packet originating from node c may eventually be
routed to a local maximum node g when greedily
forwarded based on depth (via path P1). Node g
cannot make any progress toward the surface
because it does not have any neighboring node with
depth shallower than its own. Node g must thus
perform a route recovery process to get around the
void via path P2. For Underwater networks, there is
no efficient routing algorithm that delivers messages
deterministically even in the presence of void nodes.
Therefore several recovery methods was proposed
such as 2D void surface flooding and random walks
[15]. These methods also have a drawback: some of
the nodes around a void area will eventually route
packets to local maxima (called trapped nodes, e.g.,
node i and h in Fig. 1), and any nodes located
beneath the trapped nodes can potentially suffer
from route hop stretch because local greedy
forwarding may lead packets to local maxima and
then invoke fallback mechanisms. For example in
Fig.2, node c’s packet is greedily forwarded to the
local maxima via path P1 and then is re-routed via
path P2 (total 7 hops), whereas this packet can be
directly delivered via path P3 (total 3 hops). Note
that these problems will be more pronounced when
the number of sonobuoys is sparse or when node
density is low. This drawback of pressure routing is
inherently due to the nodes’ blindness to the network
topology, as they make localized routing decisions.
Fig. 2. Greedy Pressure Routing.
In this paper, pressure routing is improved
by providing nodes with a partial view of the
network topology such that greedy pressure routing
is guided by soft-state breadcrumbs (i.e., up/down
directions) from the sonobuoys. This soft-state
breadcrumb approach, which exploits periodic
beaconing to build directional trails toward the
surface nodes utilize geo-opportunistic forwarding
along the directional trails.
The rest of the paper in organized as
follows. In section II, review the related work in
field. In section III, provide a detailed description of
proposed techniques. In section IV, provide a details
about parameters used for simulation and validate
the performance of proposed approach by comparing
it with existing approach. In section V, conclude the
paper.
II. RELATED WORK
Underwater Sensor Networks are attracting
the attention of industry and academia as well [15].
At one side, it can enable a wide range of aquatic
applications, and on the same time, adverse
environmental conditions create a range of
challenges for underwater communication and
networking. Major challenges in the design of
underwater acoustic networks are:
Battery power is limited and usually
batteries cannot be recharged, because solar
energy cannot be exploited;
Channel characteristics, including long and
variable propagation delays, multi-path and
fading problems;
The available bandwidth is severely
limited;
High bit error rates;
Underwater sensors are prone to failures
because of fouling, corrosion, etc.
The main issues for development for routing
protocols for underwater sensor network.
Harsh deployment environment is the major
challenging factor which comes under
routing protocol for underwater sensor
network.
Bandwidth capacity is low because routing
protocol for underwater sensor network
comes from high bit error rates.](https://image.slidesharecdn.com/dz34765771-130706050221-phpapp02/75/Dz34765771-2-2048.jpg)
![Shreyas M.S, Prof. D. Jayaramaiah / International Journal of Engineering Research and
Applications (IJERA) ISSN: 2248-9622 www.ijera.com
Vol. 3, Issue 4, Jul-Aug 2013, pp.765-771
767 | P a g e
Node mobility is also another concern
which comes under routing protocol for
underwater sensor network because if they
are not anchored at the bottom of the sea.
This situation conclusion in a dynamic
topology
Radio single are not efficient compare to
routing protocol for underwater sensor
network. Because it provides high
propagation delays.
High propagation delays are the major
factor of routing protocol for underwater
sensor network.
The applications for underwater acoustic sensor
networks:
Environmental monitoring. UW-ASNs can
perform pollution monitoring (chemical,
biological and nuclear). For example, it
may be possible to detail the chemical
slurry of antibiotics, estrogen-type
hormones and insecticides to monitor
streams, rivers, lakes and ocean bays (water
quality in situ analysis). Monitoring of
ocean currents and winds, improved
weather forecast, detecting climate change,
under-standing and predicting the effect of
human activities on marine ecosystems,
biological monitoring such as tracking of
fishes or micro-organisms, are other
possible applications. For example, in [16],
the design and construction of a simple
underwater sensor network is described to
detect extreme temperature gradients
(thermoclines), which are considered to be
a breeding ground for certain marine micro-
organisms.
Undersea explorations. Underwater sensor
networks can help detecting underwater
oilfields or reservoirs, determine routes for
laying undersea cables, and assist in
exploration for valuable minerals.
Disaster prevention. Sensor networks that
measure seismic activity from remote
locations can provide tsunami warnings to
coastal areas, or study the effects of
submarine earthquakes (seaquakes).
Assisted navigation. Sensors can be used to
identify hazards on the seabed, locate
dangerous rocks or shoals in shallow
waters, mooring positions, submerged
wrecks, and to perform bathymetry
profiling.
Underwater Routing Protocols: Vector-Based
Forwarding (VBF) [6] prescribes that packets be
forwarded to the nodes that are located within a
route of the given width between the source and the
destination. This relay selection algorithm saves
energy consumption by reducing the number of
packet relays. Note that there are also geographic
routing protocols that exploit the opportunistic
forwarding features in underwater environments [7].
Pressure Routing: Yan et al. proposed a greedy
any-cast routing solution called Depth Based
Routing (DBR) [8]. They suggested that packet
forwarding decisions be made locally based on the
pressure (or depth) level measured at each node.
Packets would then be geographically forwarded to
nodes with shallower depth in a greedy fashion
toward the water surface. DBR exploits the
simultaneous packet reception induced by the
broadcast nature of the wireless medium and
performs opportunistic greedy forwarding via a
subset of the neighbors that have received the packet
correctly. However, DBR lacks an efficient
forwarding set selection method and a recovery
method from local maxima. Therefore, recent
research in underwater networks has been directed to
position-based or geographic routing because it does
not require any link state exchanges or route
maintenances (i.e., stateless and localized). Thus, it
suffices to route a packet upwards to shallower
depths. Given that the onboard hydraulic pressure
gauge can accurately estimate depth, we can use
depth information for geographic any-cast routing
(called pressure routing).
Opportunistic Routing: Most opportunistic routing
protocols (also called any-path routing) such as
ExOR [9], Least Cost Opportunistic Routing
(LCOR) [10], which do not use geographic
information, require global topology and link quality
information (like link state routing) to find a set of
forwarding groups toward the destination; thus, they
are more suitable for static wireless mesh or sensor
networks. In practice, geographic routing can also
benefit from opportunistic forwarding, as in
Geographic Random Forwarding (GeRaF) [13],
Contention Based Forwarding (CBF) [14], and
Focused Beam Routing (FBR) [15], though these
methods are not optimal due to lack of global
knowledge. In the literature, researchers have
typically used a geometric shape (e.g., a
triangle/cone [14], [15]) that is faced toward the
destination for forwarding set selection to prevent
hidden terminal problems.
III. PROPOSED TECHNIQUES
The proposed Anti-Void (AV) technique
consists of three components, namely Routing
Initialization, Enhanced Periodic Beaconing and
Opportunistic directional data forwarding.
A. Routing Initialization
The Sonobuoys uses Enhanced Periodic
Beaconing method to propagate their reachability
information to sensor nodes. Each node’s beacon is
augmented with additional information, namely the
NodeID (), sender’s depth π() (or pressure
level), hop count to a sonobuoys hop_count(),](https://image.slidesharecdn.com/dz34765771-130706050221-phpapp02/75/Dz34765771-3-2048.jpg)

![Shreyas M.S, Prof. D. Jayaramaiah / International Journal of Engineering Research and
Applications (IJERA) ISSN: 2248-9622 www.ijera.com
Vol. 3, Issue 4, Jul-Aug 2013, pp.765-771
769 | P a g e
greedy upward forwarding; otherwise, we use
greedy downward forwarding. As the data packet is
forwarded upward beneath the concave area of
voids, a change of data forwarding direction is
inevitable. Data forwarding direction alone cannot
provide sufficient information to route packets to the
destination. In conjunction, we use the next-hop data
forwarding direction, which was the predecessor’s
data forwarding direction during beacon propagation
and now becomes the next-hop’s data forwarding
direction. The forwarding node uses the next-hop’s
data forwarding direction as an additional direction
constraint to ensure that routing properly follows the
direction trails; i.e., among all neighboring nodes, a
neighboring nodes whose data forwarding directions
are equal to the next-hop data forwarding direction
of the current node. Therefore, there are only four
possible cases of data forwarding and next-hop data
forwarding direction setting: up-up, down-down,
down-up, and up-down.
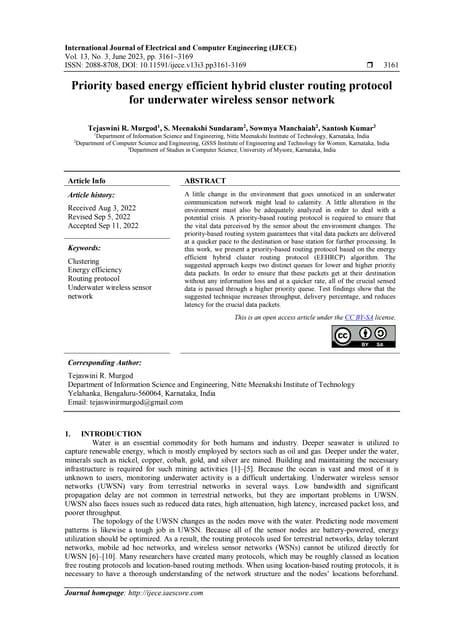
Consider an example scenario depicted in
Fig. 4. In particular, let us take a look at the nodes a,
b, and x. Here, node x is a trapped node that
eventually delivers packets to the local maximum
via greedy upward forwarding. DF_dir and NDF_dir
of nodes a and b are up-up, whereas those of node x
are dn-up. Let us say that there is a packet to send in
node b. Node b’s DF_dir is up and will consider
nodes whose depth is shallower than that of node b,
namely nodes a and x. Since node x’s DF_dir
(down) does not match with that of NDF_dir (up),
the trapped node x is filtered out, and node a is only
considered as a forwarding candidate for local
greedy “upward” forwarding.
Fig. 4. Opportunistic Directional Data Forwarding
IV. SIMULATIONS
Simulation setup
A simulation is performed on set of network
topologies with varying number of sensor nodes.
The nodes will be allowed to move over the network
location. Meanwhile, additional 4 nodes are
deployed on the upper surface of the region to
simulate the presence of Sonobuoys (sink node) and
assumption that these Sonobuoys will be static.
The parameters which are considered in the
simulation are listed in the table below
Simulation results
The network connectivity is analysed first
and its impact on the performance of greedy
forwarding under different node and sonobuoys
densities. Comparative study between the proposed
solution and existing DBR protocol [8] is made.
Extensive simulation results show that proposed
solution outperforms existing DBR protocol.
Fig. 5: Energy consumption per message
Fig. 5 shows the average energy
consumption per message. Energy consumption per
message decreases as the number of deployed nodes
increases. A higher number of deployed nodes
consequently can yield more chances for greedy
upward forwarding to succeed without requiring a
route recovery process to reach any of the
sonobuoys, resulting in less energy consumption per
message.
PARAMETER VALUE
Area 800m * 800m
Simulation Time 120 sec
Number of nodes 50-300
Number of Sink Nodes 4
Transmission Range 200m
Initial battery pack 1000 J
Tx Power 20 W [17]
Rx Power 600 mW [17]
Idle Mode Power 5 mW
Data rate 100 Kbps
Packet size 500 Kb](https://image.slidesharecdn.com/dz34765771-130706050221-phpapp02/75/Dz34765771-5-2048.jpg)
![Shreyas M.S, Prof. D. Jayaramaiah / International Journal of Engineering Research and
Applications (IJERA) ISSN: 2248-9622 www.ijera.com
Vol. 3, Issue 4, Jul-Aug 2013, pp.765-771
770 | P a g e
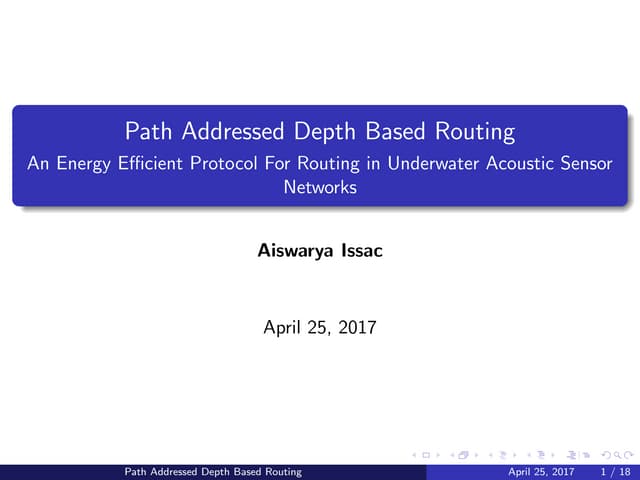
Fig 6: Packet Delivery Ratio
Fig. 6 shows the average packet delivery
ratio. As the number of nodes increases probability
of error occurred during routing will be less.
Although a packet may reach the sinks multiple
times, these redundant packets are considered as
only one distinct packet.
V. CONCLUSION
In this paper, the proposed solution which
exploits periodic beaconing to build directional path
towards the surface by avoiding void regions and
features opportunistic directional forwarding for
packet delivery. The extensive simulations showed
that proposed solution outperforms existing scheme
by significantly lowering the frequency of recovery
fall-backs and by reducing the energy consumption.
REFERENCES
[1]. J. Kong, J.-H. Cui, D. Wu, and M. Gerla,
“Building Underwater Ad-hoc Networks
and Sensor Networks for Large Scale Real-
time Aquatic Applications,” in IEEE
MILCOM, 2005.
[2]. I. F. Akyildiz, D. Pompili, and T. Melodia,
“Underwater Acoustic Sensor Networks:
Research Challenges,” Elsevier Ad Hoc
Networks, 2005.
[3]. U. Lee, J. Kong, J.-S. Park, E. Magistretti,
and M. Gerla. Time-Critical Underwater
Sensor Diffusion with No Proactive
Exchanges and Negligible Reactive Floods.
In ISCC’06, June 2006.
[4]. Z. Zhou, J.-H. Cui, and A. Bagtzoglou.
Scalable Localization with Mobility
Prediction for Underwater Sensor
Networks. In INFOCOM’08, Apr. 2008.
[5]. J. Jaffe and C. Schurgers. Sensor Networks
of Freely Drifting Autonomous Underwater
Explorers. In WUWNet’06, Sep. 2006.
[6]. P. Xie, J.-H. Cui, and L. Lao, “Vbf: Vector-
based forwarding protocol for underwater
sensor networks.” in Networking, 2006.
[7]. J. M. Jornet, M. Stojanovic, and M. Zorzi,
“Focused Beam Routing Protocol for
Underwater Acoustic Networks,” in
WUWNet’08, Sep. 2008.
[8]. H. Yan, Z. Shi, and J.-H. Cui, “DBR:
Depth-Based Routing for Underwater
Sensor Networks,” in IFIP Networking,
2008.
[9]. S. Biswas and R. Morris, “Opportunistic
Routing in Multi-Hop Wireless Networks,”
in SIGCOMM, 2005.
[10]. H. Dubois-Ferriere, M. Grossglauser, and
M. Vetterli, “Least-Cost Opportunistic
Routing,” in Allerton, 2007.
[11]. C. E. Perkins and E. M. Royer, “Ad-hoc
on-demand distance vector routing,” in
IEEE Workshop on Mobile Computing Sys.
and Apps., 1997.
[12]. C. E. Perkins and P. Bhagwat, “Highly
dynamic destination sequenced distance-
vector routing (dsdv) for mobile
computers,” in SIGCOMM, 1994.
[13]. D. B. Johnson and D. A. Maltz, “Dynamic
source routing in ad hoc wireless
networks,” Mobile Computing, pp. 153–
181, 1996.
[14]. Clausen and P. Jacquet, “Optimized Link
State Routing Protocol (OLSR),” IETF
RFC 3626, 2003.
[15]. Jun-Hong Cui, Jiejun Kong, Mario Gerla
and Shengli Zhou, " Challenges: Building
Scalable Mobile Underwater Wireless
Sensor Networks for Aquatic
Applications", IEEE Network, Special
Issue on Wireless Sensor Networking, Vol.
20, No. 3, pp.12-18, May/June 2006.
[16]. B. Zhang, G.S. Sukhatme, A.A. Requicha,
Adaptive sampling for marine
microorganism monitoring, in: IEEE/RSJ
International Conference on Intelligent
Robots and Systems, 2004.
[17]. http://www.hydrointernational.com/files/pr
oductsurvey_v_pdfdocument_15.pdf
Authors Profile
Shreyas M.S is currently Pursuing
Master of Technology in Computer
Network Engineering from The
Oxford College of Engineering under
Visvesvaraya Technological
University (VTU), India and has
received the Bachelor of Engineering
in Information Science and
Engineering in 2011 from VTU,
India. His area of interest is
Terrestrial and Acoustic Wireless
Sensor Networks.](https://image.slidesharecdn.com/dz34765771-130706050221-phpapp02/75/Dz34765771-6-2048.jpg)


The document discusses the design of an anti-void traversal mechanism using pressure routing for underwater sensor networks to efficiently route data packets towards surface sonobuoys while managing void areas in the acoustic environment. It addresses the challenges of underwater communications, such as limited bandwidth, high latency, and energy efficiency, and proposes a solution that enhances existing depth-based routing protocols with opportunistic beacon packet receptions and a breadcrumb approach to navigate around voids. The paper outlines the development and validation of this routing protocol as a more effective means of ensuring reliable underwater data collection.