Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
zaidthepro04
6 views
CH3.2 control systens 2 slides study.pdf
asdasd
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 35
2
/ 35
3
/ 35
4
/ 35
5
/ 35
6
/ 35
7
/ 35
8
/ 35
9
/ 35
10
/ 35
11
/ 35
12
/ 35
13
/ 35
14
/ 35
15
/ 35
16
/ 35
17
/ 35
18
/ 35
19
/ 35
20
/ 35
21
/ 35
22
/ 35
23
/ 35
24
/ 35
25
/ 35
26
/ 35
27
/ 35
28
/ 35
29
/ 35
30
/ 35
31
/ 35
32
/ 35
33
/ 35
34
/ 35
35
/ 35
More Related Content
PDF
Modern Control System (BE)
by
PRABHAHARAN429
PPSX
linear algebra in control systems
by
Ganesh Bhat
PPT
State_space_represenation_&_analysis.ppt
by
stevemwirigi77
PDF
Week_2.pdf State Variable Modeling, State Space Equations
by
idajia
PDF
Lec46
by
Rishit Shah
PPTX
Conversion of transfer function to canonical state variable models
by
Jyoti Singh
PPTX
Controllability of Linear Dynamical System
by
Purnima Pandit
PDF
Lec9
by
Rishit Shah
Modern Control System (BE)
by
PRABHAHARAN429
linear algebra in control systems
by
Ganesh Bhat
State_space_represenation_&_analysis.ppt
by
stevemwirigi77
Week_2.pdf State Variable Modeling, State Space Equations
by
idajia
Lec46
by
Rishit Shah
Conversion of transfer function to canonical state variable models
by
Jyoti Singh
Controllability of Linear Dynamical System
by
Purnima Pandit
Lec9
by
Rishit Shah
Similar to CH3.2 control systens 2 slides study.pdf
PDF
control systems.pdf
by
ShilpaSweety2
PPTX
INTRODUCTION TO STATE SPACE ANALYSIS basic
by
SIBANANDAMOHANTY5
PPTX
state space representation,State Space Model Controllability and Observabilit...
by
Waqas Afzal
PPT
lecture19-2xwwdver21119095256-7ef20eb1.ppt
by
h04324193
PPT
lecture1 (9).ppt
by
HebaEng
PDF
Modern Control - Lec07 - State Space Modeling of LTI Systems
by
Amr E. Mohamed
PPTX
State space analysis.pptx
by
RaviMuthamala1
DOCX
Discrete control
by
cairo university
PPT
STate Space Analysis
by
Hussain K
PDF
State space analysis-1-43.pdf state space
by
as10maths
PDF
Control Theory Lecture 4: State-Space Representation
by
Hangearnbsp
PDF
Lec47
by
Rishit Shah
PDF
Sbe final exam jan17 - solved-converted
by
cairo university
PDF
3.State-Space Representation of Systems.pdf
by
AbrormdFayiaz
PPTX
STATE_SPACE_ANALYSIS.final.pptx FOR ENGINEERING STUDENTS
by
surajeethedurev
DOCX
Discrete control2
by
cairo university
PDF
State equationlecture
by
haymanotyehuala
PDF
Modern Control Engineering Problems Ch 3.pdf
by
Mahamad Jawhar
PPTX
State space techniques for discrete control systems.
by
HugoGustavoGonzlezHe
PPTX
Introduction to mathematical control theory - Dr. Purnima Pandit
by
Purnima Pandit
control systems.pdf
by
ShilpaSweety2
INTRODUCTION TO STATE SPACE ANALYSIS basic
by
SIBANANDAMOHANTY5
state space representation,State Space Model Controllability and Observabilit...
by
Waqas Afzal
lecture19-2xwwdver21119095256-7ef20eb1.ppt
by
h04324193
lecture1 (9).ppt
by
HebaEng
Modern Control - Lec07 - State Space Modeling of LTI Systems
by
Amr E. Mohamed
State space analysis.pptx
by
RaviMuthamala1
Discrete control
by
cairo university
STate Space Analysis
by
Hussain K
State space analysis-1-43.pdf state space
by
as10maths
Control Theory Lecture 4: State-Space Representation
by
Hangearnbsp
Lec47
by
Rishit Shah
Sbe final exam jan17 - solved-converted
by
cairo university
3.State-Space Representation of Systems.pdf
by
AbrormdFayiaz
STATE_SPACE_ANALYSIS.final.pptx FOR ENGINEERING STUDENTS
by
surajeethedurev
Discrete control2
by
cairo university
State equationlecture
by
haymanotyehuala
Modern Control Engineering Problems Ch 3.pdf
by
Mahamad Jawhar
State space techniques for discrete control systems.
by
HugoGustavoGonzlezHe
Introduction to mathematical control theory - Dr. Purnima Pandit
by
Purnima Pandit
Recently uploaded
PPTX
Environmental and Ecology UNIT 4 - Global Warming-1.pptx
by
MinakshiSultania
PPTX
Aix-Marseille Université Diploma
by
美国加利福尼亚州立理工大学波莫纳分校学位证书补办【Q微号:1954 292 140】CPP毕业证购买
PPTX
Data Science with R Final yrUnit II.pptx
by
Osmania University
PPTX
Fiber reinforced concrete (FRC) is a composite material made from Portland ce...
by
manojaioe
PDF
Sensor & Instrument MODULE 3 REVISION PPT.pdf
by
26dsyogam
PPTX
Optimizing Plant Maintenance — Key Elements of a Successful Maintenance Plan ...
by
MaintWiz Technologies Private Limited
DOCX
Buy Facebook Ads Accounts_ Boost Your Professional ....docx
by
topusapro.com
PPTX
Industrial Smart Ventilation system.pptx
by
fsanjay42
PPTX
Civil_Engineering_Technician_Skill_Assessment_2025_2026_Presentation.pptx
by
CDR Australia Engineer
PDF
Paralleling of Alternators - First Edition - 2022
by
Mahmoud Moghtaderi
PDF
Nostr : A protocol for freedom of speech
by
Emre YILMAZ
PDF
A Guide to Components and Operation of Refrigeration Plant - Part 1
by
Mahmoud Moghtaderi
PPTX
2_Consequence of threats, E-mail threats, Web.pptx
by
dolly475229
PPTX
Network Security v1.0 - Module 2.pptx
by
ssuserb1479b
PDF
TechSprint: Innovate for Impact Hackathon
by
DeepakkumarSingh415123
PPTX
The Complete Guide to Energy Audits_ Unlocking Savings, Sustainability, and P...
by
greentechnexus2024
PPTX
Plant Bio-additives (2).pptxA plant bioadditive is a functional substance der...
by
Madan Bhandari university and St. Xavier's college , Maitighar
PPTX
Track & Monitor Preventive Maintenance — Best Practices with MaintWiz CMMS
by
MaintWiz Technologies Private Limited
PDF
Modeltomodel_Transformation_with_ATL (1).pdf
by
ISEMENSIAS
PPT
Tutorial-security-privacy-cloud intro duction about cloud compting its services
by
HEmansuSingh
Environmental and Ecology UNIT 4 - Global Warming-1.pptx
by
MinakshiSultania
Aix-Marseille Université Diploma
by
美国加利福尼亚州立理工大学波莫纳分校学位证书补办【Q微号:1954 292 140】CPP毕业证购买
Data Science with R Final yrUnit II.pptx
by
Osmania University
Fiber reinforced concrete (FRC) is a composite material made from Portland ce...
by
manojaioe
Sensor & Instrument MODULE 3 REVISION PPT.pdf
by
26dsyogam
Optimizing Plant Maintenance — Key Elements of a Successful Maintenance Plan ...
by
MaintWiz Technologies Private Limited
Buy Facebook Ads Accounts_ Boost Your Professional ....docx
by
topusapro.com
Industrial Smart Ventilation system.pptx
by
fsanjay42
Civil_Engineering_Technician_Skill_Assessment_2025_2026_Presentation.pptx
by
CDR Australia Engineer
Paralleling of Alternators - First Edition - 2022
by
Mahmoud Moghtaderi
Nostr : A protocol for freedom of speech
by
Emre YILMAZ
A Guide to Components and Operation of Refrigeration Plant - Part 1
by
Mahmoud Moghtaderi
2_Consequence of threats, E-mail threats, Web.pptx
by
dolly475229
Network Security v1.0 - Module 2.pptx
by
ssuserb1479b
TechSprint: Innovate for Impact Hackathon
by
DeepakkumarSingh415123
The Complete Guide to Energy Audits_ Unlocking Savings, Sustainability, and P...
by
greentechnexus2024
Plant Bio-additives (2).pptxA plant bioadditive is a functional substance der...
by
Madan Bhandari university and St. Xavier's college , Maitighar
Track & Monitor Preventive Maintenance — Best Practices with MaintWiz CMMS
by
MaintWiz Technologies Private Limited
Modeltomodel_Transformation_with_ATL (1).pdf
by
ISEMENSIAS
Tutorial-security-privacy-cloud intro duction about cloud compting its services
by
HEmansuSingh
CH3.2 control systens 2 slides study.pdf
1.
CONTROL SYSTEMS II Mutaz
Ryalat Mechatronics Department(ME) School of Applied Technical Sciences (SATS) The German-Jordanian University (GJU) MR © ˆ Lecture 2 1/35
2.
ME547-8 CONTROL SYSTEMS II CH
3 (Modeling in the Time Domain) ❑ 3.5 Converting a Transfer Function to State Space ❑ 3.6 Converting from State Space to a Transfer Function ❑ 3.7 Linearization MR © ˆ Lecture 2 2/35
3.
3.5 Converting a
Transfer Function to State Space MR © ˆ Lecture 2 3/35
4.
Transfer Function Representation ❑
Using the Laplace transform, it is possible to convert a system’s time-domain representation into a frequency-domain input/output representation, known as the transfer function. In so doing, it also transforms the governing differential equation into an algebraic equation which is often easier to analyze. ❑ Transfer Function. The transfer function of a linear, time-invariant, differential equation system is defined as the ratio of the Laplace transform of the output (response function) to the Laplace transform of the input (driving function) under the assumption that all initial conditions are zero in the in the frequency domain. ❑ The Laplace transform of a time domain function, f(t), is defined below: F(s) = L{f(t)} = Z ∞ 0 e−st f(t)dt where the parameter s = σ + jω is a complex frequency variable. MR © ˆ Lecture 2 4/35
5.
Transfer Function Representation ❑
The Laplace transform of the nth derivative of a function is particularly important: L dn f dtn = sn F(s) − sn−1 f(0) − sn−2 ˙ f(0) − ... − f(n−1) (0) ❑ Frequency-domain methods are most often used for analyzing LTI single-input/single-output (SISO) systems, e.g. those governed by a constant coefficient differential equation, as shown below: an dn y dtn + ... + a1 dy dt + a0y(t) = bm dm u dtm + ... + b1 du dt + b0u(t) ❑ The Laplace transform of this equation is given below: ansn Y (s)+...+a1sY (s)+a0Y (s) = bmsm U(s)+...+b1sU(s)+b0U(s) ❑ where Y (s) and U(s) are the Laplace Transforms of y(t) and u(t), respectively. MR © ˆ Lecture 2 5/35
6.
Transfer Function Representation ❑
Note that when finding transfer functions, we always assume that the each of the initial conditions, y(0), ẏ(0), u(0), etc. is zero. The transfer function from input U(s) to output Y (s) is, therefore: G(s) = Y (s) U(s) = bmsm + bm−1sm−1 + ... + b1s + b0 ansn + an−1sn−1 + ... + a1s + a0 ❑ It is useful to factor the numerator and denominator of the transfer function into what is termed zero-pole-gain form: G(s) = N(s) D(s) = K (s − z1)(s − z2)...(s − zm−1)(s − zm) (s − p1)(s − p2)...(s − pn−1)(s − pn) ❑ The zeros of the transfer function, z1, . . . , zm, are the roots of the numerator polynomial, i.e. the values of s such that N(s) = 0. The poles of the transfer function, p1, . . . , pn, are the roots of the denominator polynomial, i.e. the values of s such that D(s) = 0. Both the zeros and poles may be complex valued (have both real and imaginary parts). The system Gain is K = bm/an. MR © ˆ Lecture 2 6/35
7.
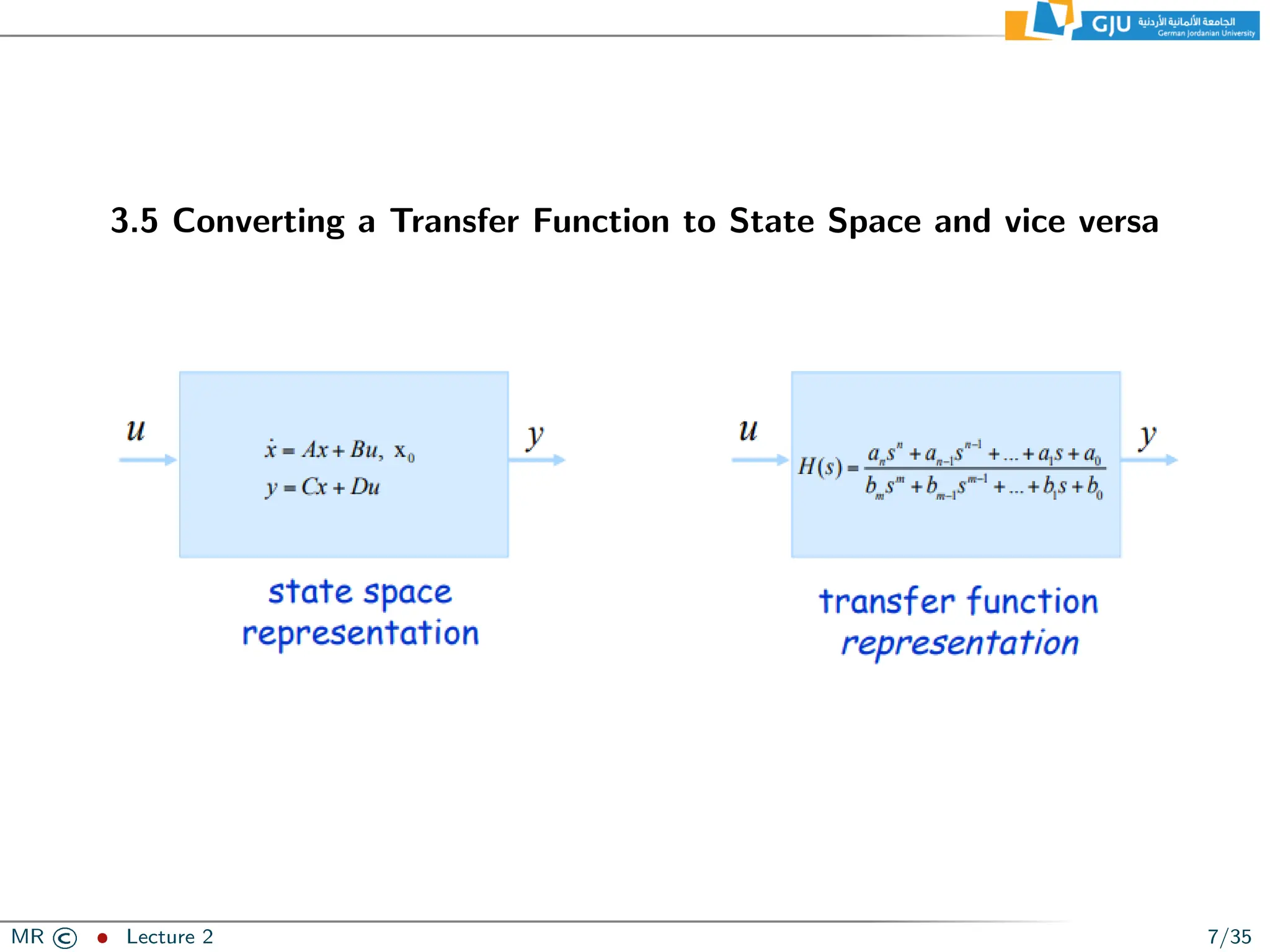
3.5 Converting a
Transfer Function to State Space and vice versa MR © ˆ Lecture 2 7/35
8.
TF’s to State-Space
Models ❑ The goal is to develop a state-space model given a transfer function for a system G(s). ❑ But there are three primary cases to consider: ❑ Simple numerator G(s) = Y (s) U(s) = 1 ansn + an−1sn−1 + ... + a1s + a0 ❑ Numerator order less than denominator order G(s) = Y (s) U(s) = bmsm + bm−1sm−1 + ... + b1s + b0 ansn + an−1sn−1 + ... + a1s + a0 , m n ❑ Numerator equal to denominator order G(s) = Y (s) U(s) = bmsm + bm−1sm−1 + ... + b1s + b0 ansn + an−1sn−1 + ... + a1s + a0 , m = n MR © ˆ Lecture 2 8/35
9.
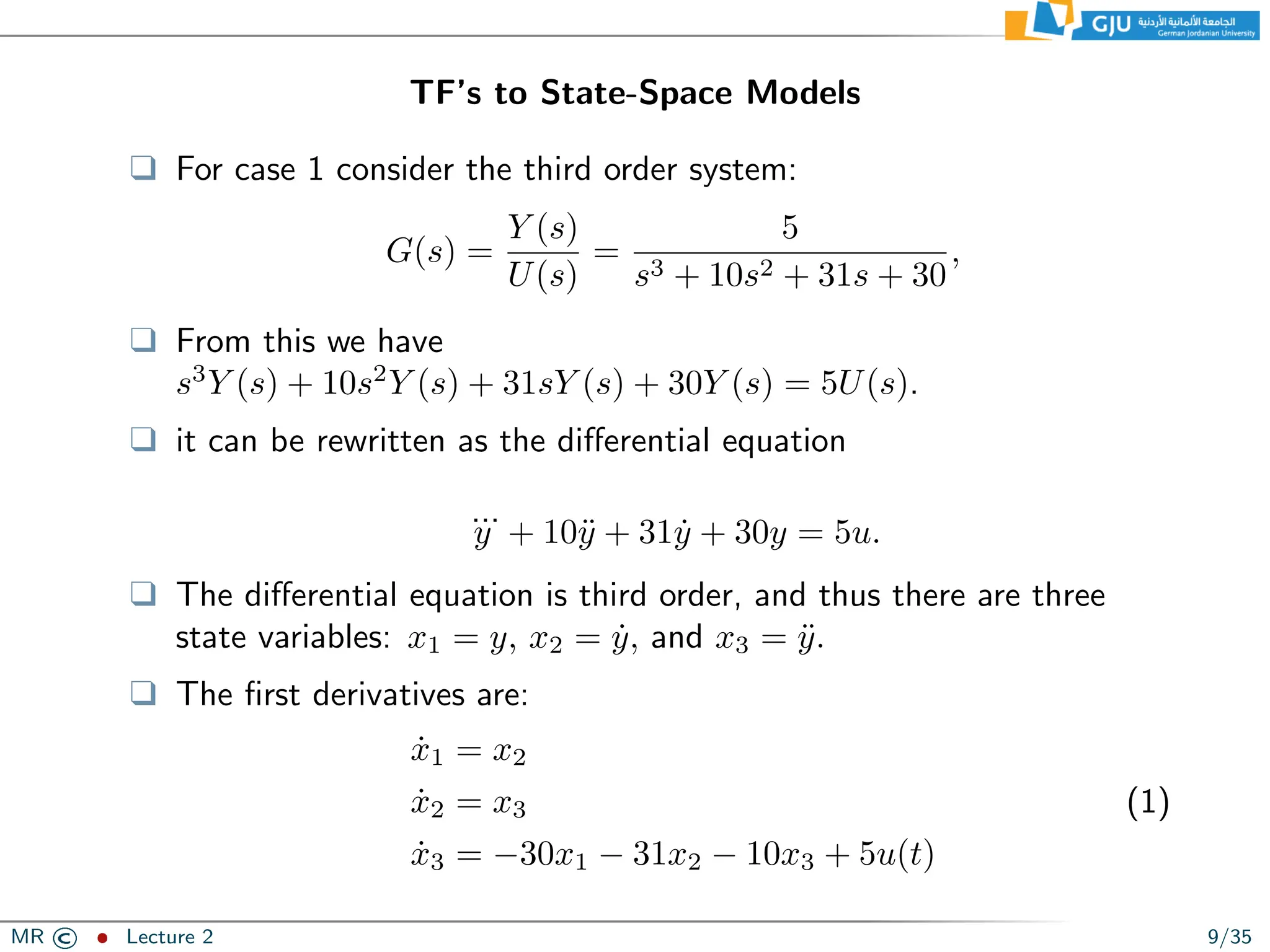
TF’s to State-Space
Models ❑ For case 1 consider the third order system: G(s) = Y (s) U(s) = 5 s3 + 10s2 + 31s + 30 , ❑ From this we have s3 Y (s) + 10s2 Y (s) + 31sY (s) + 30Y (s) = 5U(s). ❑ it can be rewritten as the differential equation ... y + 10ÿ + 31ẏ + 30y = 5u. ❑ The differential equation is third order, and thus there are three state variables: x1 = y, x2 = ẏ, and x3 = ÿ. ❑ The first derivatives are: ẋ1 = x2 ẋ2 = x3 ẋ3 = −30x1 − 31x2 − 10x3 + 5u(t) (1) MR © ˆ Lecture 2 9/35
10.
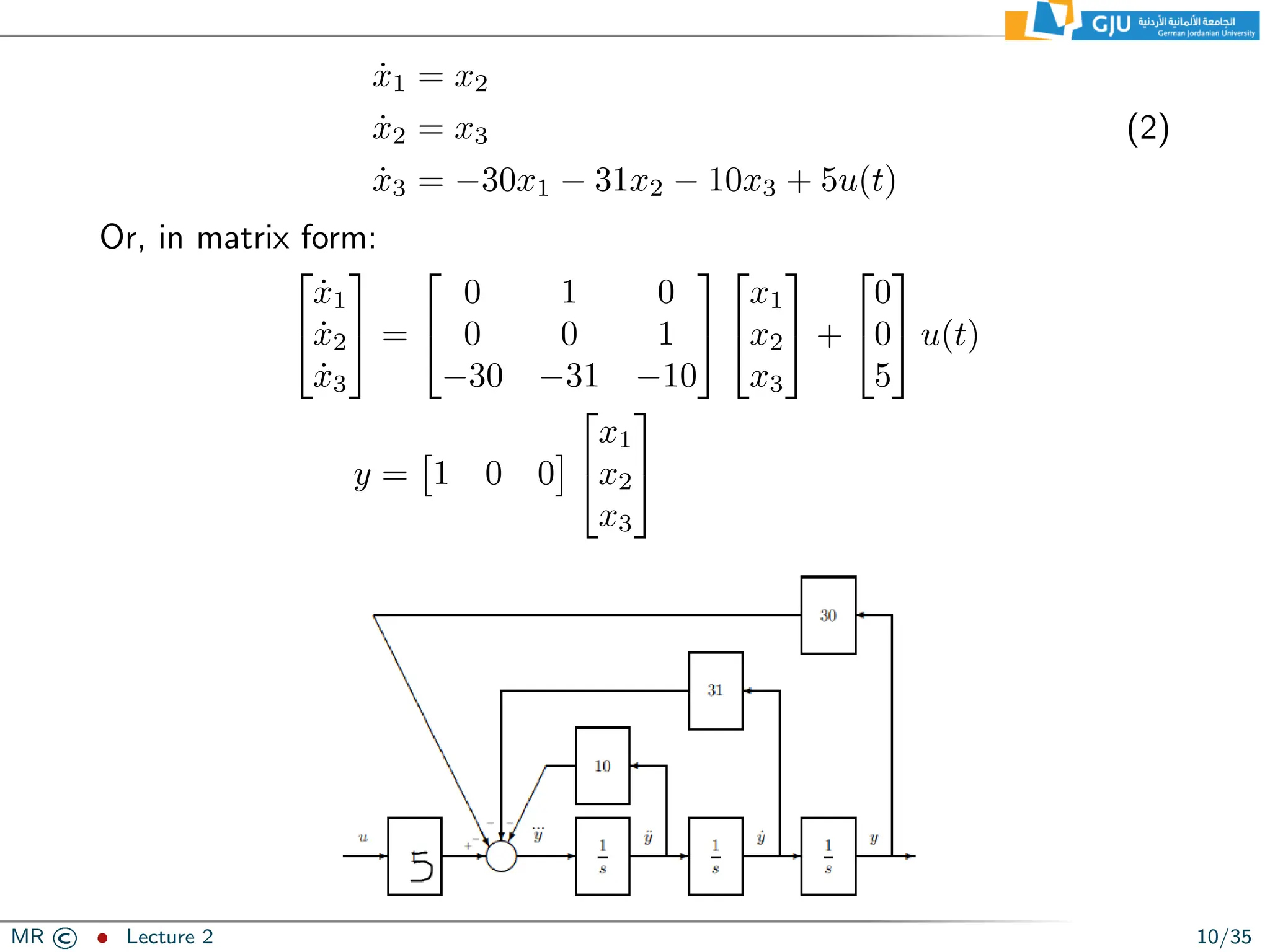
ẋ1 = x2 ẋ2
= x3 ẋ3 = −30x1 − 31x2 − 10x3 + 5u(t) (2) Or, in matrix form: ẋ1 ẋ2 ẋ3 = 0 1 0 0 0 1 −30 −31 −10 x1 x2 x3 + 0 0 5 u(t) y = 1 0 0 x1 x2 x3 MR © ˆ Lecture 2 10/35
11.
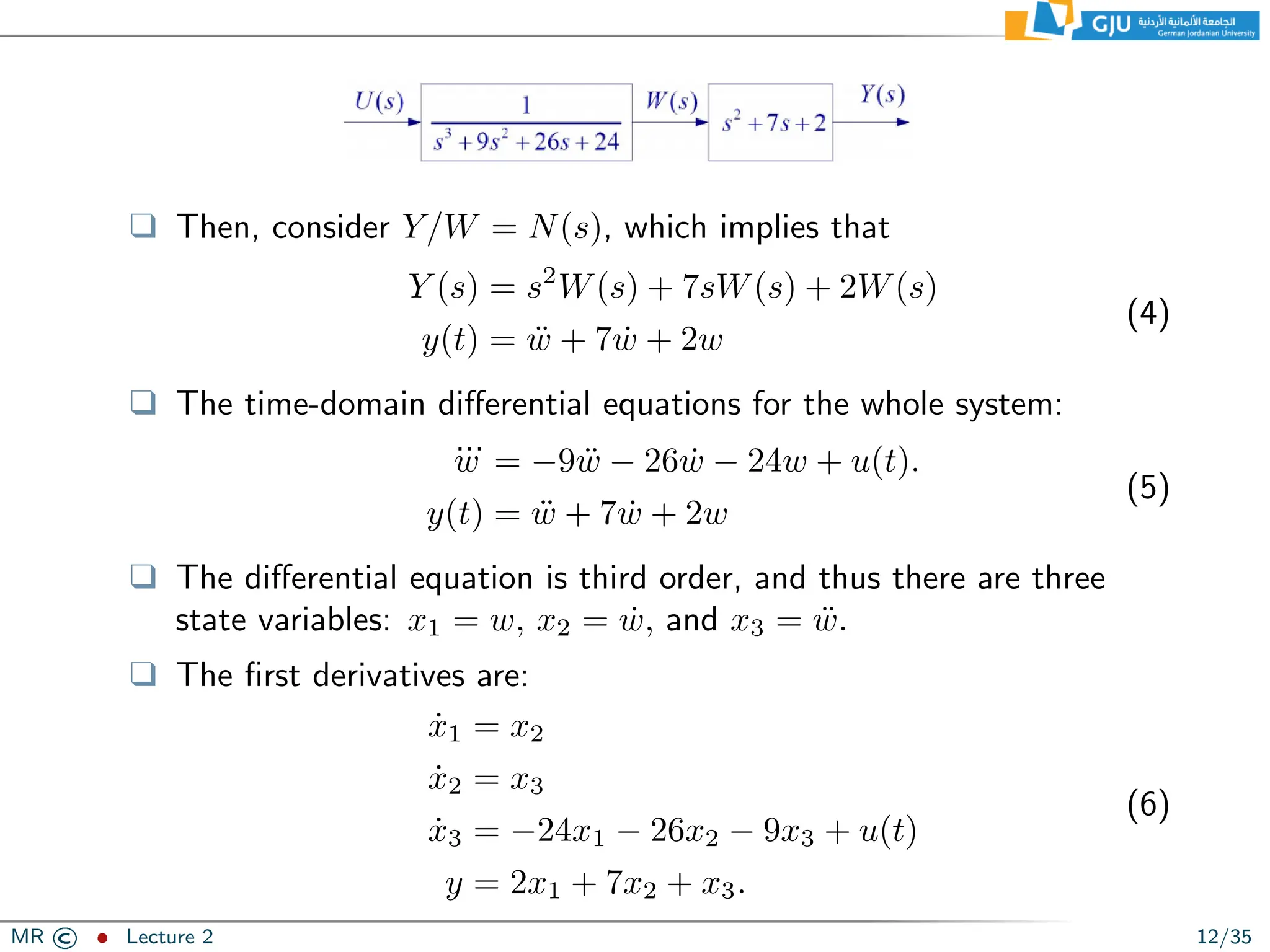
TF’s to State-Space
Models ❑ For case 2 consider the third order system: G(s) = Y (s) U(s) = s2 + 7s + 2 s3 + 9s2 + 26s + 24 = N(s) D(s) , ❑ Let Y (s) U(s) = Y (s) W(s) · W(s) U(s) ❑ where Y/W = N(s) and W/U = 1/D(s). ❑ The transfer function in block diagram cascade form ❑ Then representation of W/U = 1/D(s) is the same as case 1 s3 W(s) = −9s2 W(s) − 26sW(s) − 24W(s) + U(s) ... w = −9ẅ − 26ẇ − 24w + u(t). (3) MR © ˆ Lecture 2 11/35
12.
❑ Then, consider
Y/W = N(s), which implies that Y (s) = s2 W(s) + 7sW(s) + 2W(s) y(t) = ẅ + 7ẇ + 2w (4) ❑ The time-domain differential equations for the whole system: ... w = −9ẅ − 26ẇ − 24w + u(t). y(t) = ẅ + 7ẇ + 2w (5) ❑ The differential equation is third order, and thus there are three state variables: x1 = w, x2 = ẇ, and x3 = ẅ. ❑ The first derivatives are: ẋ1 = x2 ẋ2 = x3 ẋ3 = −24x1 − 26x2 − 9x3 + u(t) y = 2x1 + 7x2 + x3. (6) MR © ˆ Lecture 2 12/35
13.
ẋ1 = x2 ẋ2
= x3 ẋ3 = −24x1 − 26x2 − 9x3 + u(t) y = 2x1 + 7x2 + x3. (7) Or, in matrix form: ẋ1 ẋ2 ẋ3 = 0 1 0 0 0 1 −24 −26 −9 x1 x2 x3 + 0 0 1 u(t) y = 2 7 1 x1 x2 x3 MR © ˆ Lecture 2 13/35
14.
3.6 Converting from
State Space to a Transfer Function MR © ˆ Lecture 2 14/35
15.
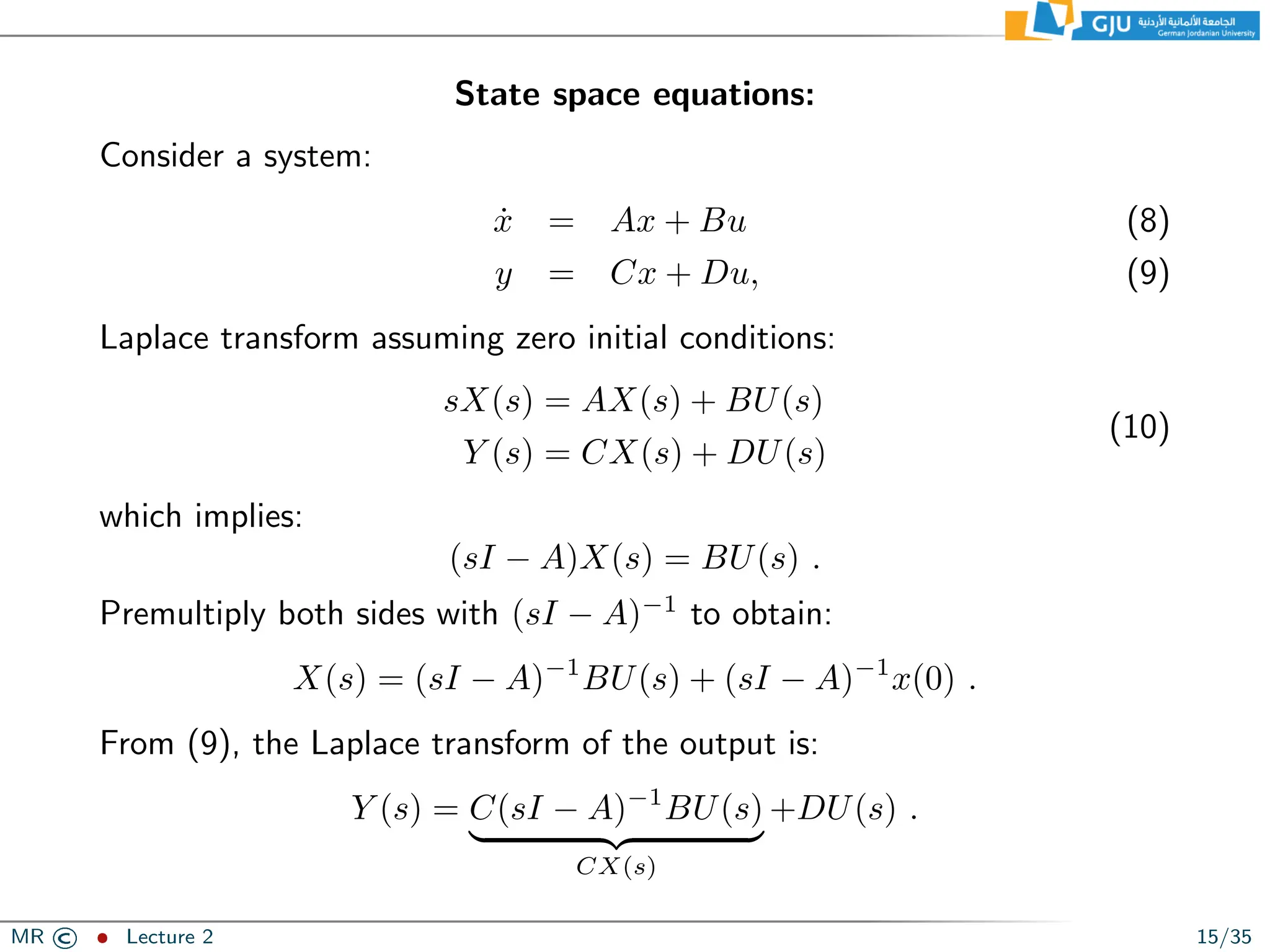
State space equations: Consider
a system: ẋ = Ax + Bu (8) y = Cx + Du, (9) Laplace transform assuming zero initial conditions: sX(s) = AX(s) + BU(s) Y (s) = CX(s) + DU(s) (10) which implies: (sI − A)X(s) = BU(s) . Premultiply both sides with (sI − A)−1 to obtain: X(s) = (sI − A)−1 BU(s) + (sI − A)−1 x(0) . From (9), the Laplace transform of the output is: Y (s) = C(sI − A)−1 BU(s) | {z } CX(s) +DU(s) . MR © ˆ Lecture 2 15/35
16.
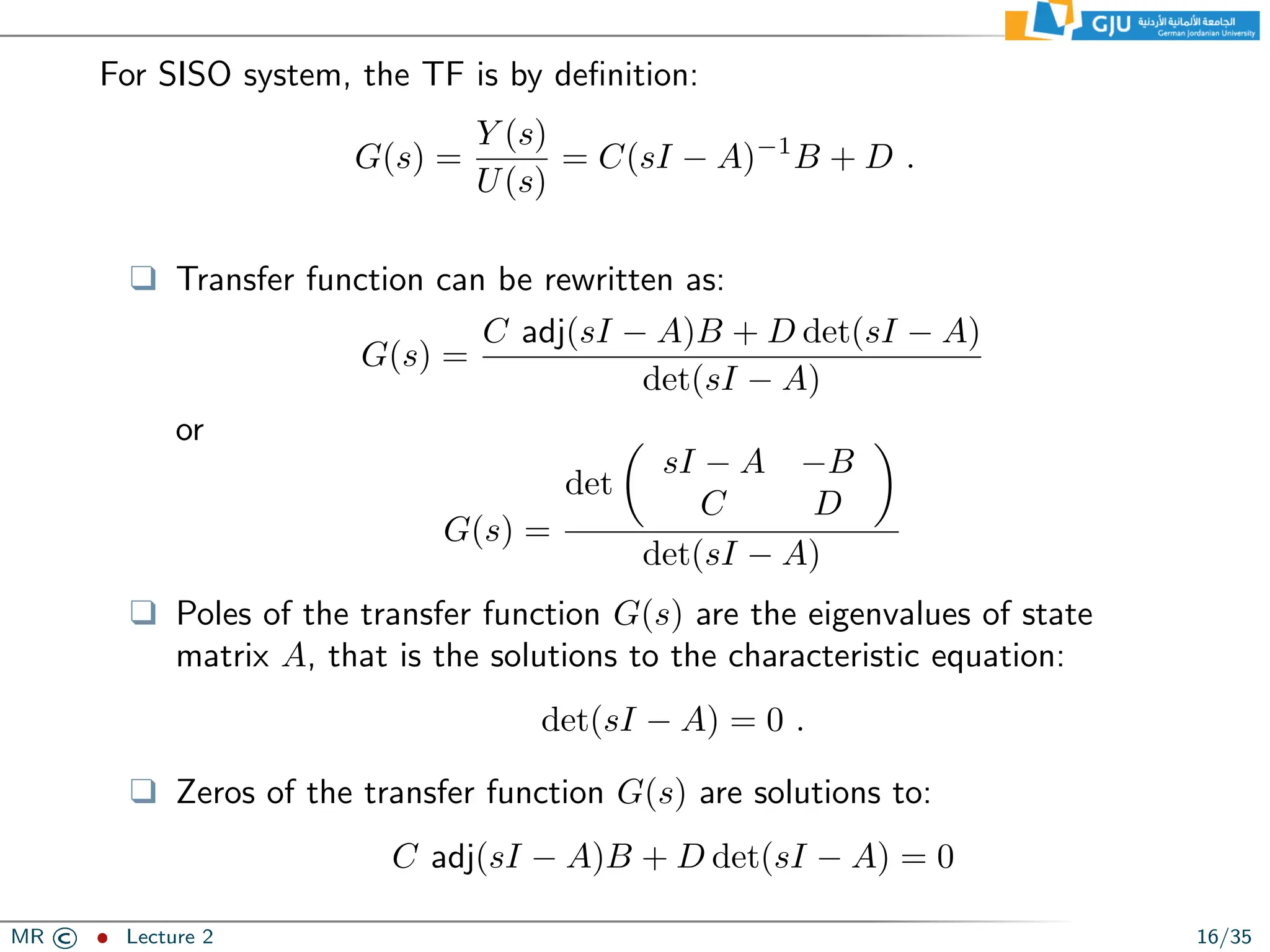
For SISO system,
the TF is by definition: G(s) = Y (s) U(s) = C(sI − A)−1 B + D . ❑ Transfer function can be rewritten as: G(s) = C adj(sI − A)B + D det(sI − A) det(sI − A) or G(s) = det sI − A −B C D det(sI − A) ❑ Poles of the transfer function G(s) are the eigenvalues of state matrix A, that is the solutions to the characteristic equation: det(sI − A) = 0 . ❑ Zeros of the transfer function G(s) are solutions to: C adj(sI − A)B + D det(sI − A) = 0 MR © ˆ Lecture 2 16/35
17.
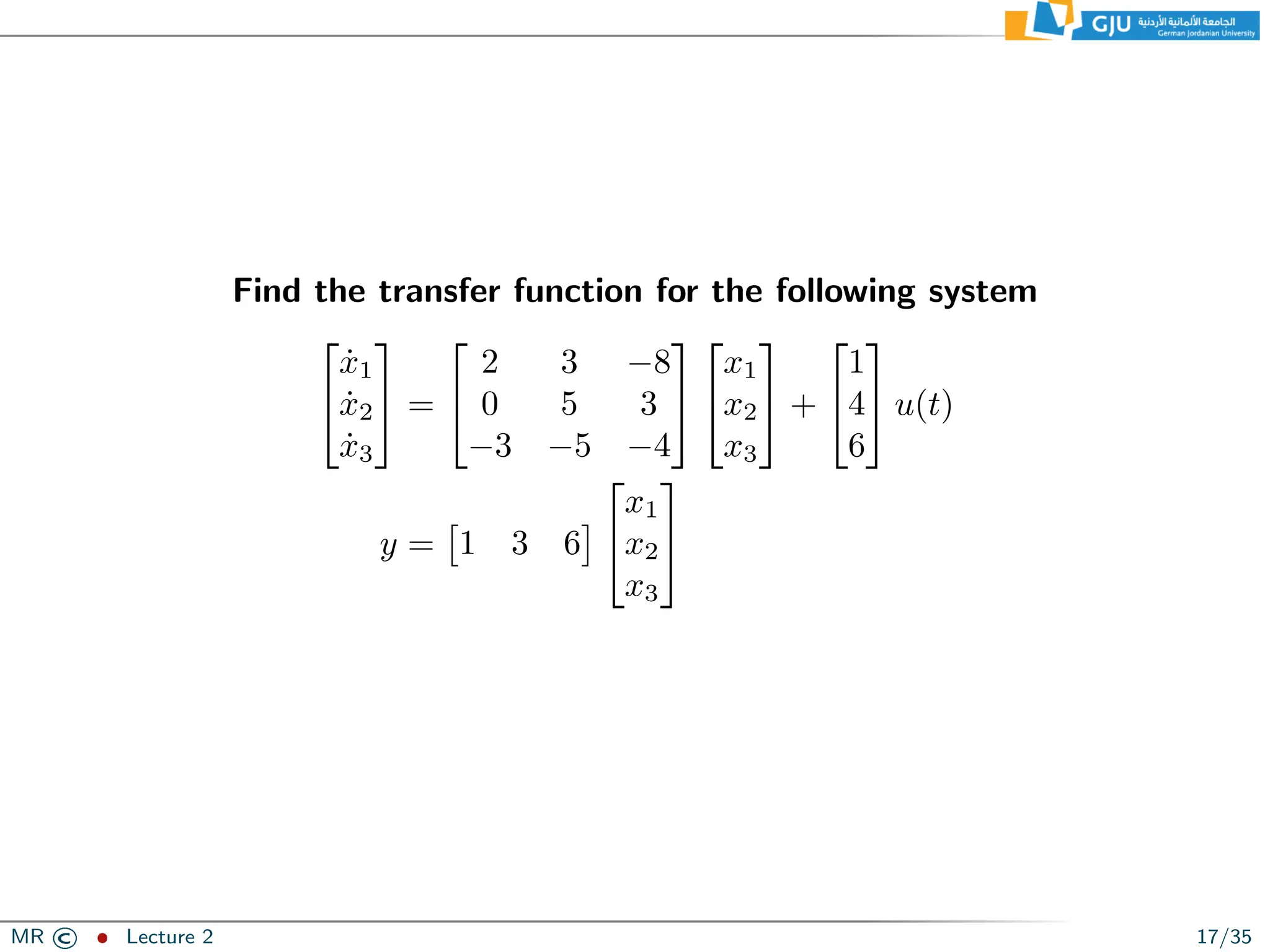
Find the transfer
function for the following system ẋ1 ẋ2 ẋ3 = 2 3 −8 0 5 3 −3 −5 −4 x1 x2 x3 + 1 4 6 u(t) y = 1 3 6 x1 x2 x3 MR © ˆ Lecture 2 17/35
18.
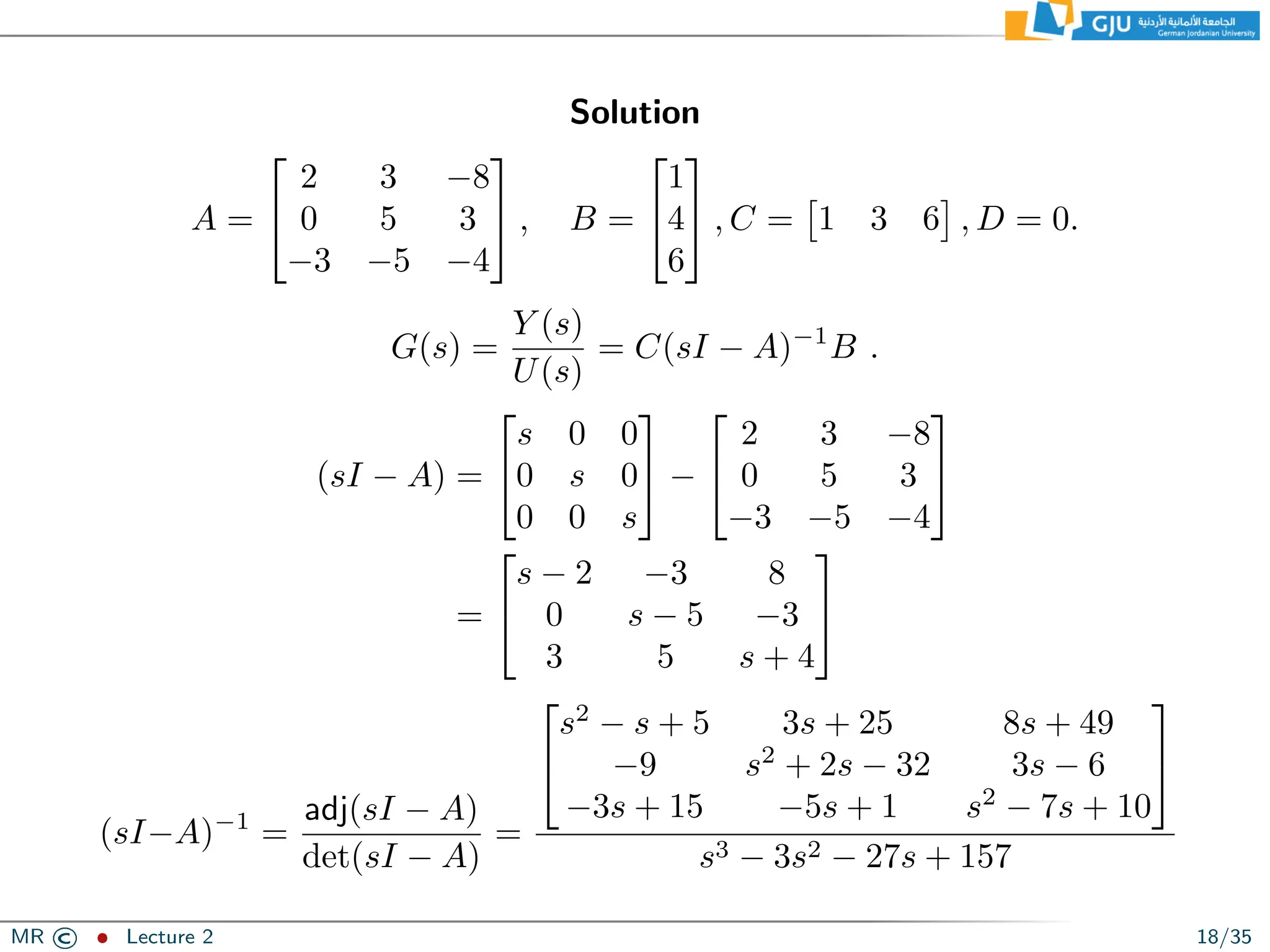
Solution A = 2 3
−8 0 5 3 −3 −5 −4 , B = 1 4 6 , C = 1 3 6 , D = 0. G(s) = Y (s) U(s) = C(sI − A)−1 B . (sI − A) = s 0 0 0 s 0 0 0 s − 2 3 −8 0 5 3 −3 −5 −4 = s − 2 −3 8 0 s − 5 −3 3 5 s + 4 (sI−A)−1 = adj(sI − A) det(sI − A) = s2 − s + 5 3s + 25 8s + 49 −9 s2 + 2s − 32 3s − 6 −3s + 15 −5s + 1 s2 − 7s + 10 s3 − 3s2 − 27s + 157 MR © ˆ Lecture 2 18/35
19.
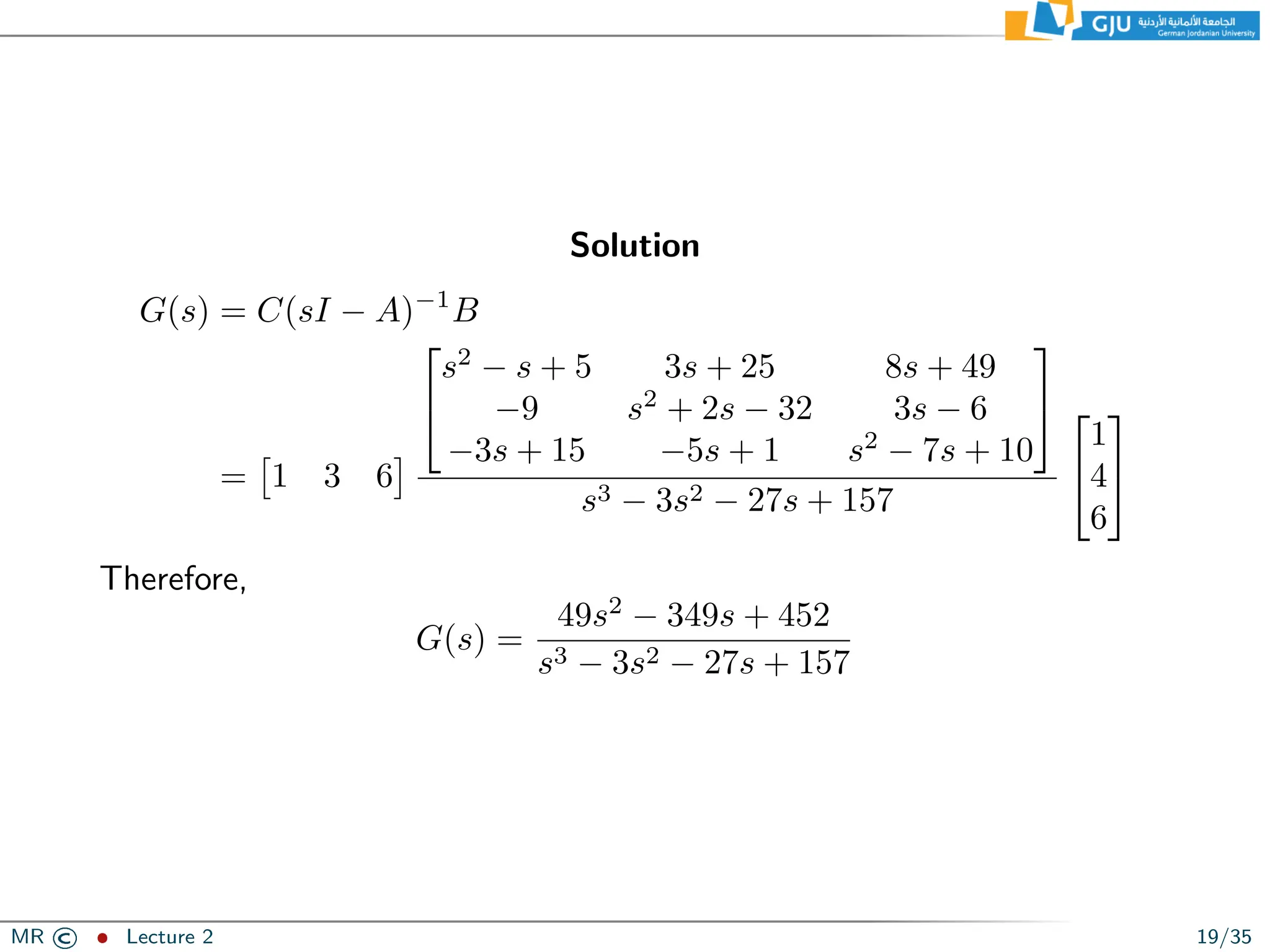
Solution G(s) = C(sI
− A)−1 B = 1 3 6 s2 − s + 5 3s + 25 8s + 49 −9 s2 + 2s − 32 3s − 6 −3s + 15 −5s + 1 s2 − 7s + 10 s3 − 3s2 − 27s + 157 1 4 6 Therefore, G(s) = 49s2 − 349s + 452 s3 − 3s2 − 27s + 157 MR © ˆ Lecture 2 19/35
20.
3.7 Linearization MR ©
ˆ Lecture 2 20/35
21.
Linearization ❑ The differential
equations of motion for almost all processes and plants selected for control in nature are nonlinear. On the other hand, most analysis and control design methods are much easier for linear than for nonlinear models. ❑ A nonlinear differential equation is an equation for which the derivatives of the state have a nonlinear relationship to the state itself and/or the control. In other words, a general nonlinear state-space model can be written in the form: ẋ = f(x, u) (11) y = h(x, u), (12) where x ∈ Rn , u ∈ Rm and y ∈ Rp are respectively the state, input and output of the system. Equation (11) is called the state equation and (12) is called the output equation. MR © ˆ Lecture 2 21/35
22.
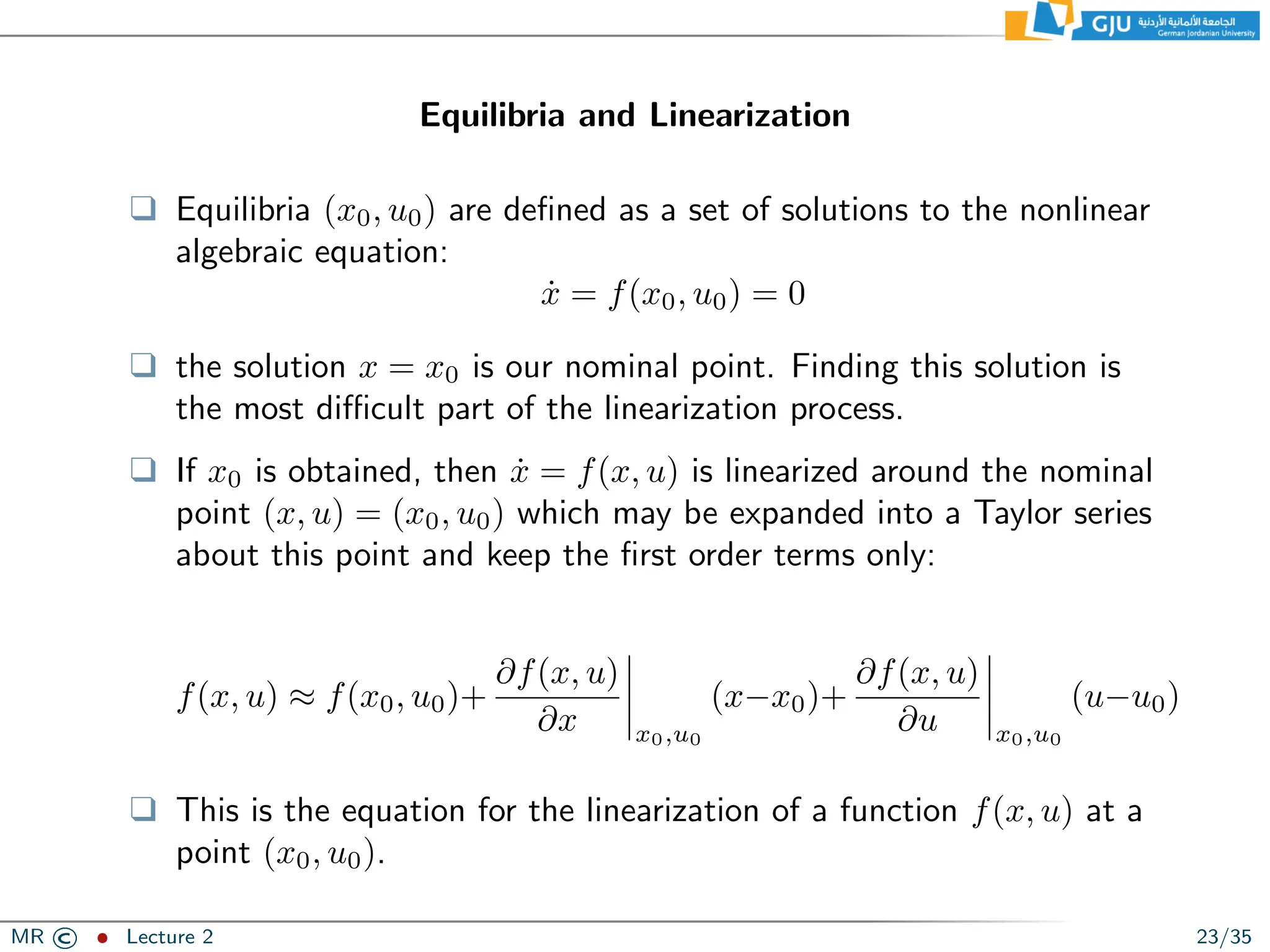
Equilibria and Linearization ❑
Linearization is a method that allows us to represent a general nonlinear state space model (11), (12), locally about an operating (nominal) point (equilibrium), by a linear state-space model. It involves finding a linear model that approximates a nonlinear one. ❑ This nominal point is physically defined usually by the designer and, roughly speaking, should be a condition where the system is expected to spend most of its life at. ❑ In control engineering a normal operation of the system may be around an equilibrium point, and the signals may be considered small signals around the equilibrium. ❑ if the system operates around an equilibrium point and if the signals involved are small signals, then it is possible to approximate the nonlinear system by a linear system. MR © ˆ Lecture 2 22/35
23.
Equilibria and Linearization ❑
Equilibria (x0, u0) are defined as a set of solutions to the nonlinear algebraic equation: ẋ = f(x0, u0) = 0 ❑ the solution x = x0 is our nominal point. Finding this solution is the most difficult part of the linearization process. ❑ If x0 is obtained, then ẋ = f(x, u) is linearized around the nominal point (x, u) = (x0, u0) which may be expanded into a Taylor series about this point and keep the first order terms only: f(x, u) ≈ f(x0, u0)+ ∂f(x, u) ∂x x0,u0 (x−x0)+ ∂f(x, u) ∂u x0,u0 (u−u0) ❑ This is the equation for the linearization of a function f(x, u) at a point (x0, u0). MR © ˆ Lecture 2 23/35
24.
❑ Introduce new
variables δx = x − x0 and δu = u − u0. ❑ Expand the nonlinear equation into McLaurin series around the equilibrium and keep only the first order terms: ẋ0 + δẋ ≈ f(x0, u0) + Aδx + Bδu, where A and B are Jacobians of f with respect to x and u, evaluated at (x0, u0), that is: A = ∂f ∂x (x0, u0); B = ∂f ∂u (x0, u0) I.e. the elements of A and B are given by: A = [aij], where [aij] = ∂fi ∂xj , B = [bij], where [bij] = ∂fi ∂uj . ❑ The system: δẋ = Aδx + Bδu, (13) is called the linearization of the nonlinear model ẋ = f(x, u) at (x0, u0). MR © ˆ Lecture 2 24/35
25.
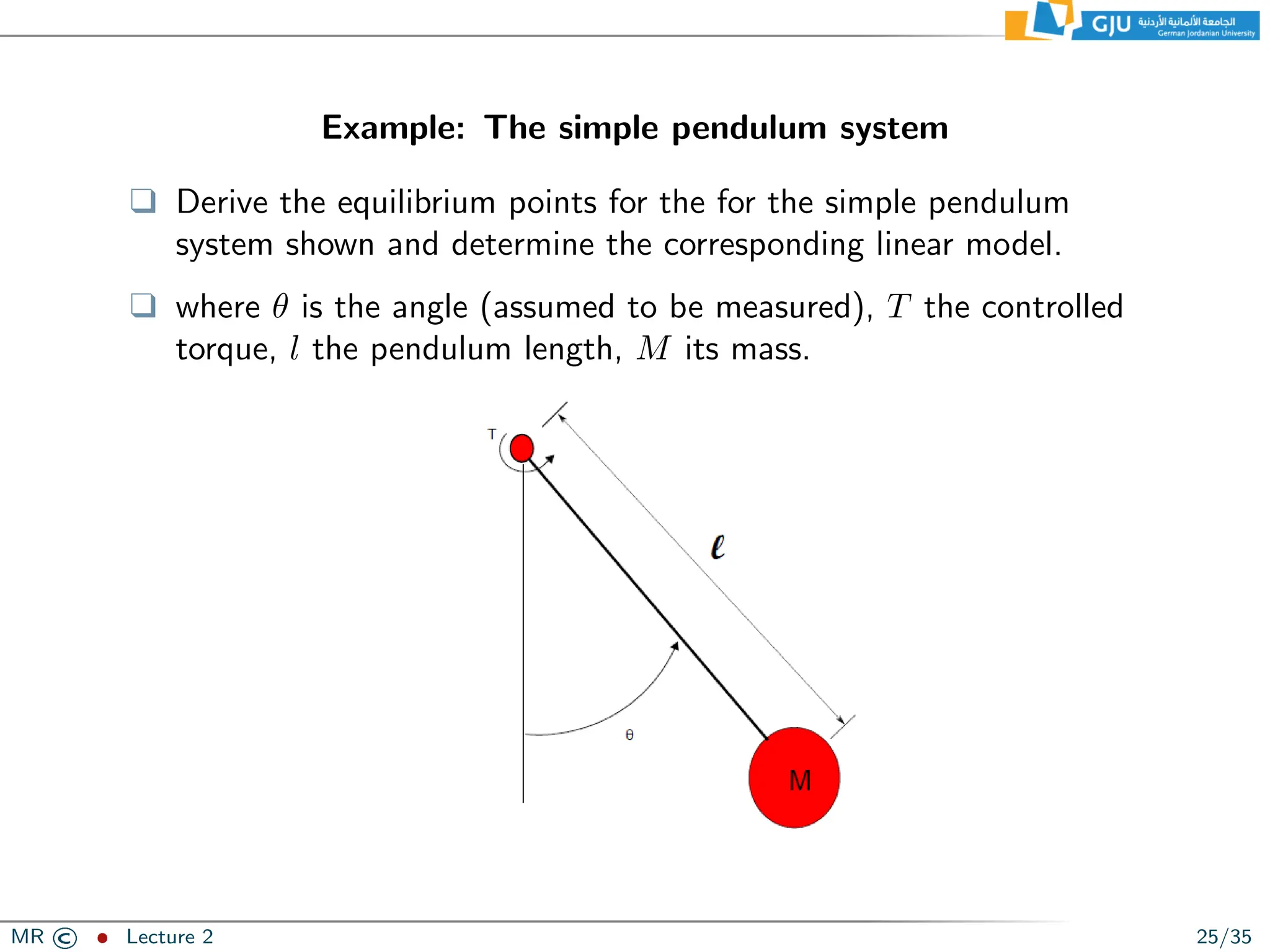
Example: The simple
pendulum system ❑ Derive the equilibrium points for the for the simple pendulum system shown and determine the corresponding linear model. ❑ where θ is the angle (assumed to be measured), T the controlled torque, l the pendulum length, M its mass. MR © ˆ Lecture 2 25/35
26.
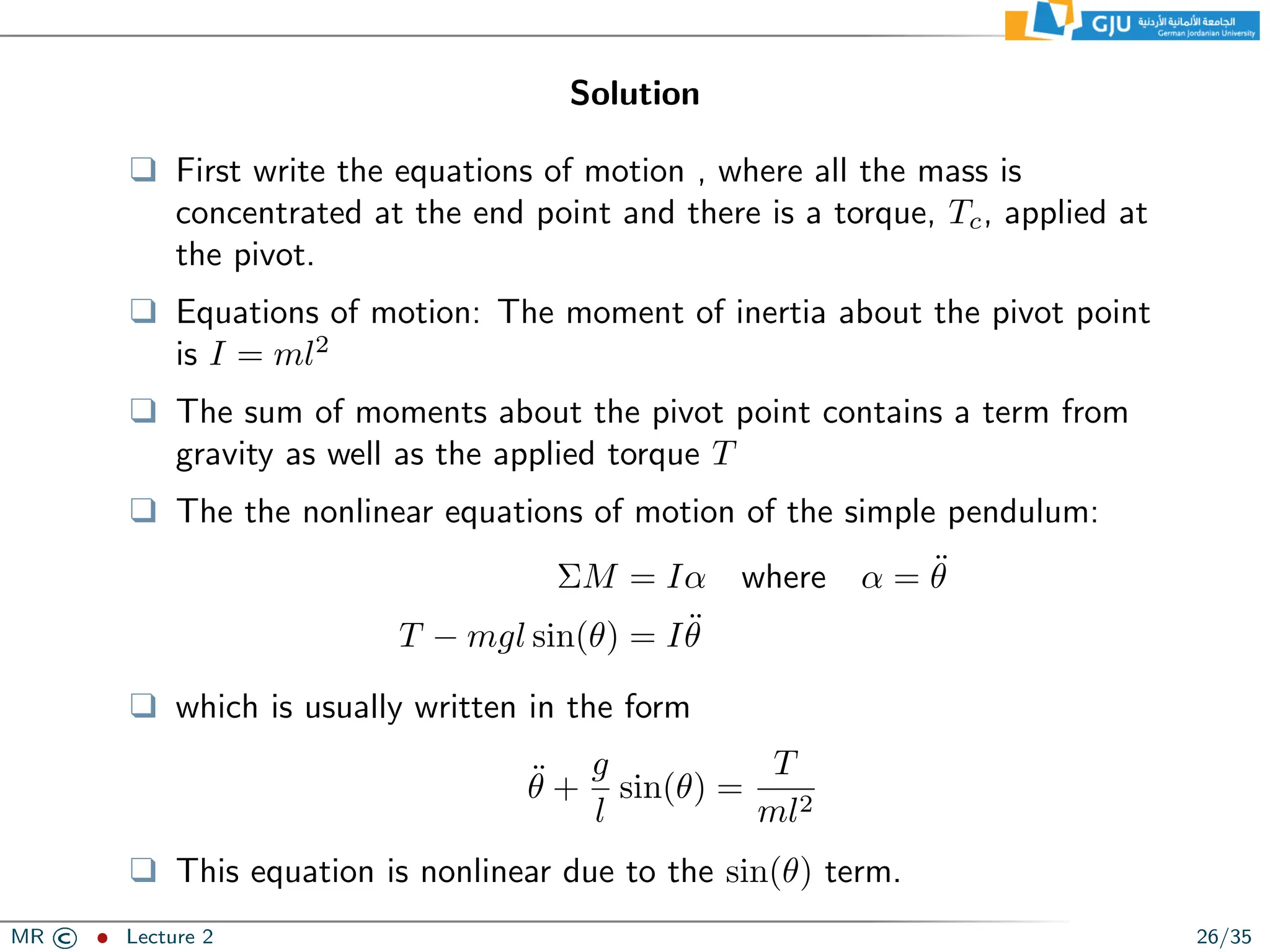
Solution ❑ First write
the equations of motion , where all the mass is concentrated at the end point and there is a torque, Tc, applied at the pivot. ❑ Equations of motion: The moment of inertia about the pivot point is I = ml2 ❑ The sum of moments about the pivot point contains a term from gravity as well as the applied torque T ❑ The the nonlinear equations of motion of the simple pendulum: ΣM = Iα where α = θ̈ T − mgl sin(θ) = Iθ̈ ❑ which is usually written in the form θ̈ + g l sin(θ) = T ml2 ❑ This equation is nonlinear due to the sin(θ) term. MR © ˆ Lecture 2 26/35
27.
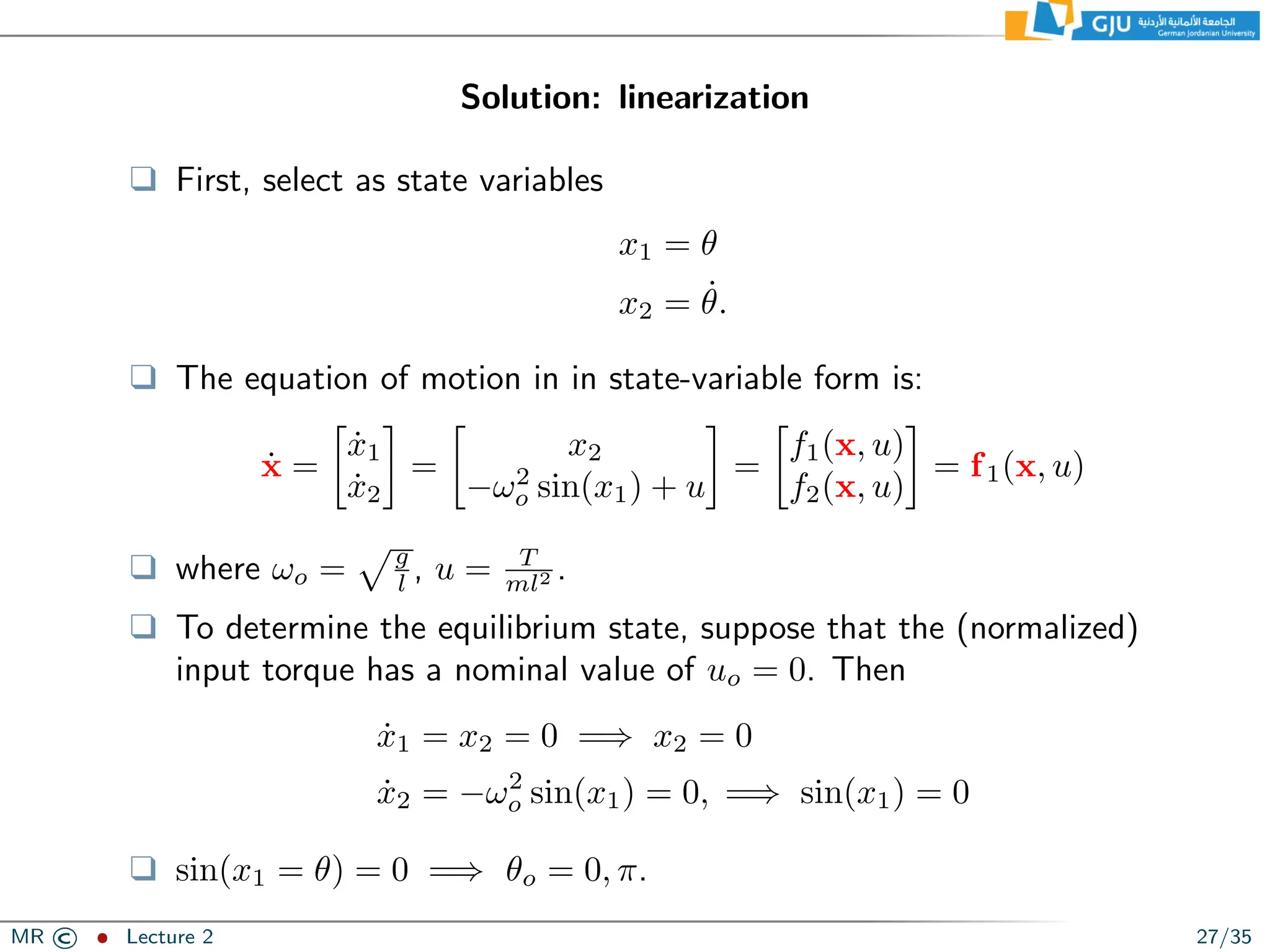
Solution: linearization ❑ First,
select as state variables x1 = θ x2 = θ̇. ❑ The equation of motion in in state-variable form is: ẋ = ẋ1 ẋ2 = x2 −ω2 o sin(x1) + u = f1(x, u) f2(x, u) = f1(x, u) ❑ where ωo = pg l , u = T ml2 . ❑ To determine the equilibrium state, suppose that the (normalized) input torque has a nominal value of uo = 0. Then ẋ1 = x2 = 0 =⇒ x2 = 0 ẋ2 = −ω2 o sin(x1) = 0, =⇒ sin(x1) = 0 ❑ sin(x1 = θ) = 0 =⇒ θo = 0, π. MR © ˆ Lecture 2 27/35
28.
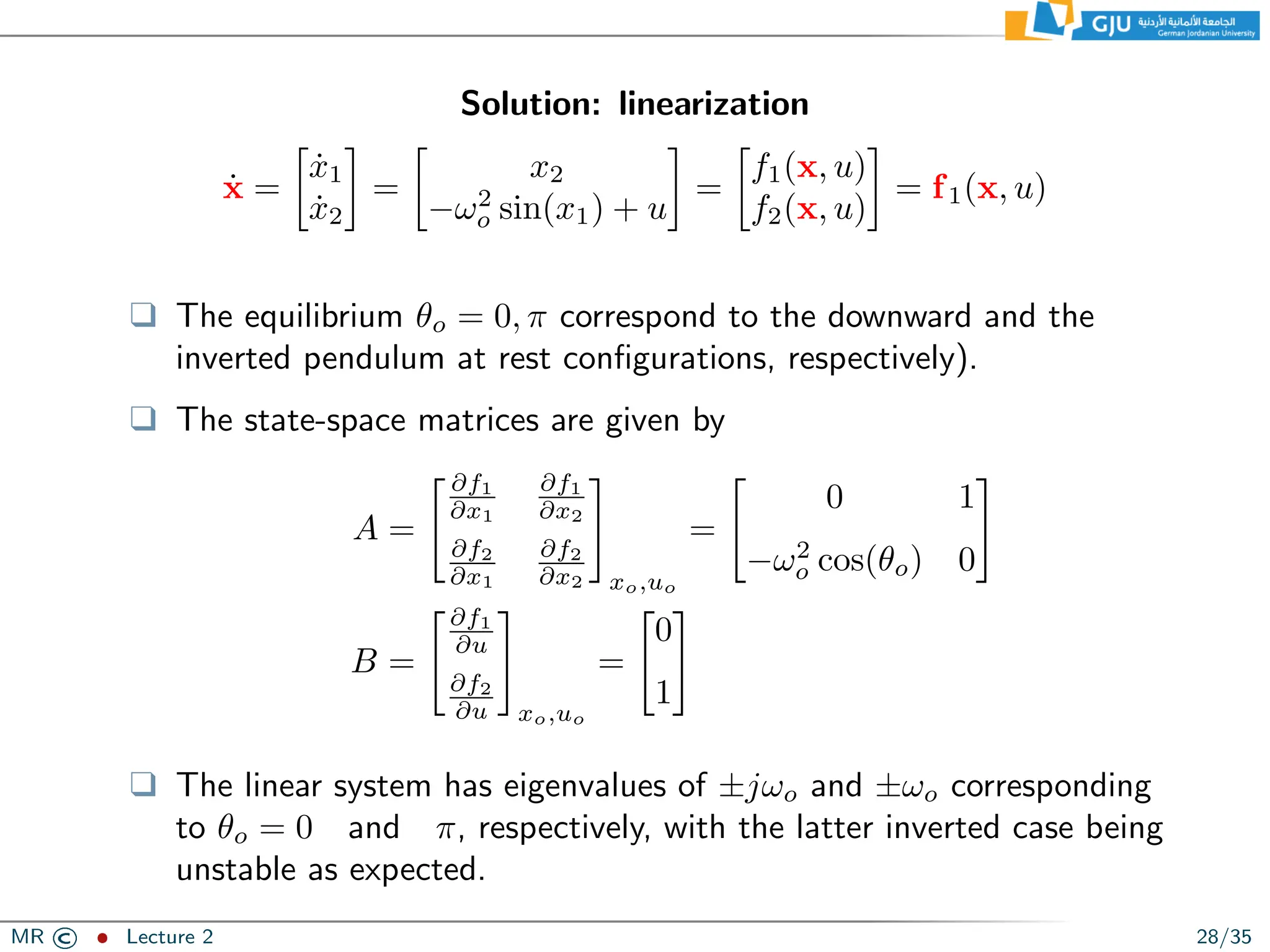
Solution: linearization ẋ = ẋ1 ẋ2 = x2 −ω2 o
sin(x1) + u = f1(x, u) f2(x, u) = f1(x, u) ❑ The equilibrium θo = 0, π correspond to the downward and the inverted pendulum at rest configurations, respectively). ❑ The state-space matrices are given by A = ∂f1 ∂x1 ∂f1 ∂x2 ∂f2 ∂x1 ∂f2 ∂x2 # xo,uo = 0 1 −ω2 o cos(θo) 0 # B = ∂f1 ∂u ∂f2 ∂u # xo,uo = 0 1 # ❑ The linear system has eigenvalues of ±jωo and ±ωo corresponding to θo = 0 and π, respectively, with the latter inverted case being unstable as expected. MR © ˆ Lecture 2 28/35
29.
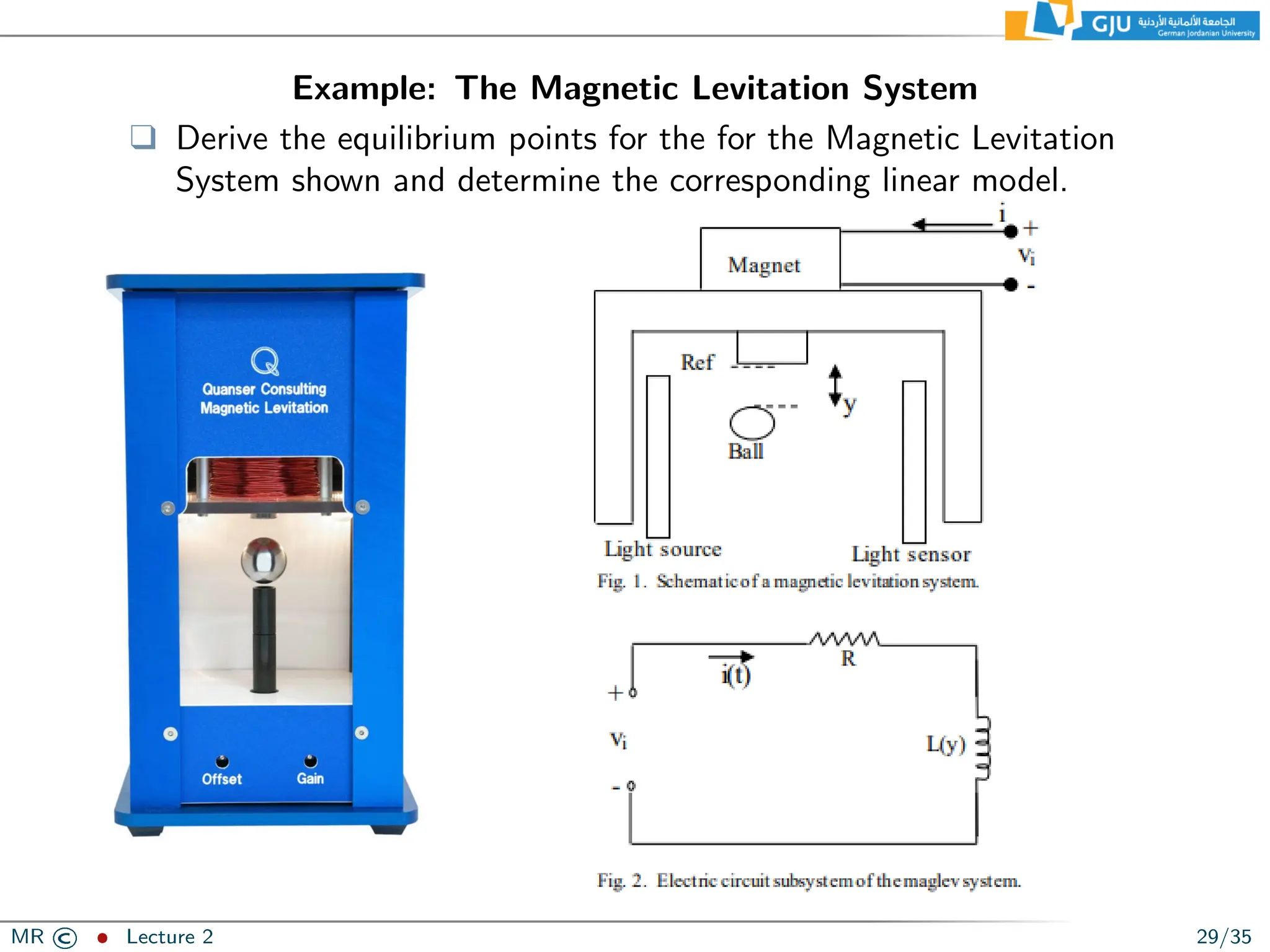
Example: The Magnetic
Levitation System ❑ Derive the equilibrium points for the for the Magnetic Levitation System shown and determine the corresponding linear model. MR © ˆ Lecture 2 29/35
30.
Introduction ❑ The Magnetic
Levitation system is a classic electromechanical experiment with interesting nonlinear dynamics and control challenges. ❑ Magnetic levitation technology is used in systems such as Maglev trains and electromagnetic cranes. Research is also being done to use magnetic control technology for contactless, high-precision positioning of wafers ❑ The Magnetic Levitation (MagLev) device is a single degree of freedom electromagnet-based system which is used to levitate a steel ball on air against the gravitational force by the electromagnetic force generated by an electromagnet which is controlled based on the measurement of the gap between the magnet and the ball. ❑ The overhead electromagnet, wound in coil, generates an attractive force on the metal ball that initially sits on the post. The position of the ball is measured using a photo-sensitive sensor embedded inside the post. The system also includes a current sensor to measure the current inside the electromagnet’s coil. MR © ˆ Lecture 2 30/35
31.
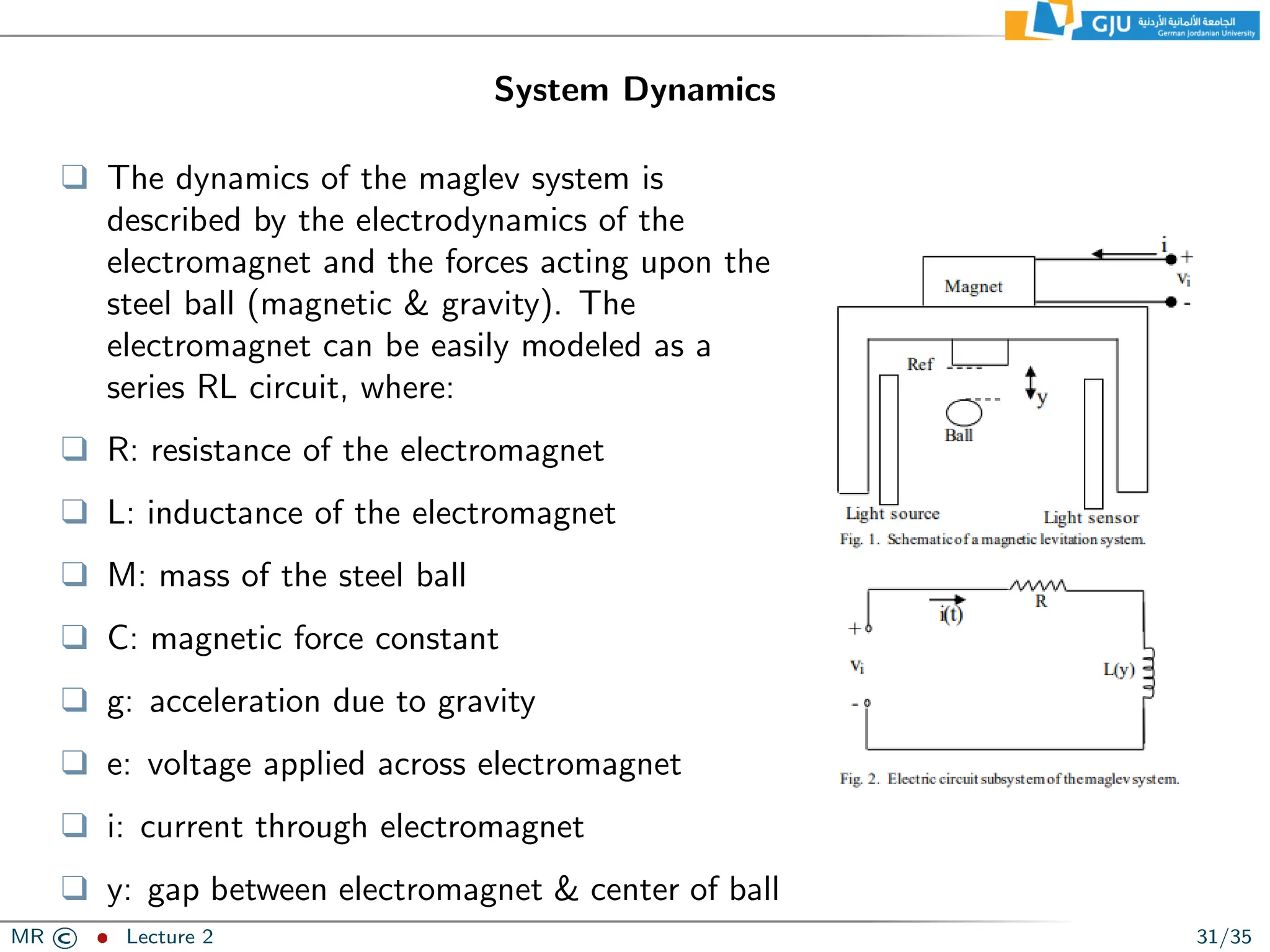
System Dynamics ❑ The
dynamics of the maglev system is described by the electrodynamics of the electromagnet and the forces acting upon the steel ball (magnetic gravity). The electromagnet can be easily modeled as a series RL circuit, where: ❑ R: resistance of the electromagnet ❑ L: inductance of the electromagnet ❑ M: mass of the steel ball ❑ C: magnetic force constant ❑ g: acceleration due to gravity ❑ e: voltage applied across electromagnet ❑ i: current through electromagnet ❑ y: gap between electromagnet center of ball MR © ˆ Lecture 2 31/35
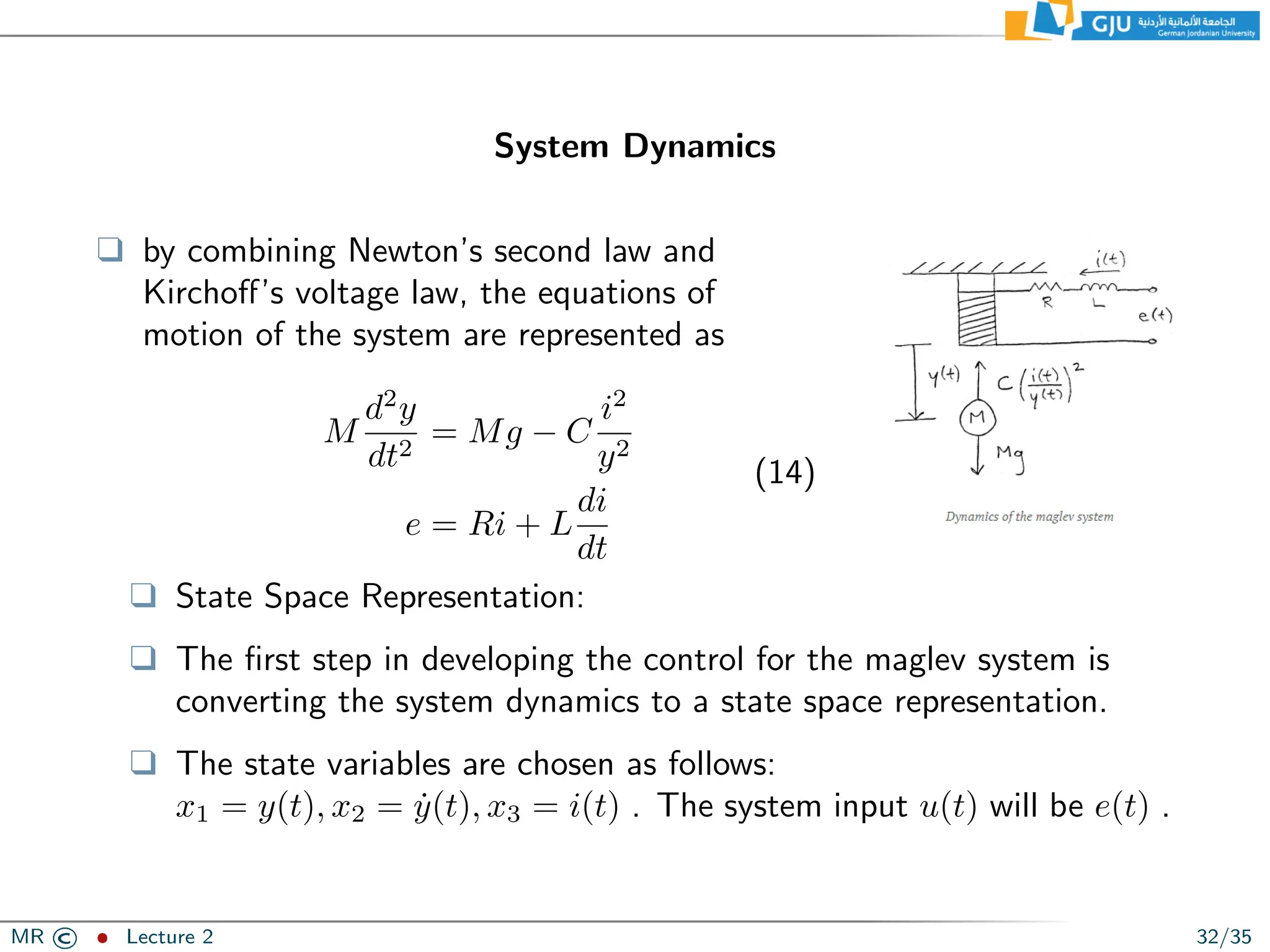
32.
System Dynamics ❑ by
combining Newton’s second law and Kirchoff’s voltage law, the equations of motion of the system are represented as M d2 y dt2 = Mg − C i2 y2 e = Ri + L di dt (14) ❑ State Space Representation: ❑ The first step in developing the control for the maglev system is converting the system dynamics to a state space representation. ❑ The state variables are chosen as follows: x1 = y(t), x2 = ẏ(t), x3 = i(t) . The system input u(t) will be e(t) . MR © ˆ Lecture 2 32/35
33.
System Dynamics ❑ Expressing
the system dynamics in terms of the state variables yields the following equations ẋ1 = x2 ẋ2 = g − C M x3 x1 2 ẋ3 = 1 L (u − Rx3) (15) with f = [ẋ1, ẋ2, ẋ3]T and ẋ = [x1, x2, x3]T . ❑ Clearly, the system dynamics are non-linear. ❑ it is preferable to linearize the system about an equilibrium point. ❑ The equilibrium points of a system are found by setting f = 0 and solving for x1, x2, x3, u. ❑ Since there are four variables to solve for and only three equations, the system is underdetermined. MR © ˆ Lecture 2 33/35
34.
Determining the Equilibrium
Point ❑ This can be remedied by setting x1(t) = d , where d (desired) is the height set point. ❑ Solving for the variables yields the following equilibrium point ❑ (Note: we are interested in the equilibrium point (e) corresponding to levitation of the steel ball. The equilibrium point corresponding to x3 = 0 is not of interest since this implies the electromagnet is turned off). x1,e = d x2,e = 0 x3,e = d r Mg C ue = dR r Mg C (16) with f(xe) = [x1,e, x2,e, x3,e]T . MR © ˆ Lecture 2 34/35
35.
Linearizing the System
Dynamics ❑ The linearized system describes the system dynamics relative to the equilibrium point. ❑ We define δx = x − xe and δu = u − ue as the deviations of the state and control from the equilibrium point, respectively. ❑ The linearized system dynamics are given by δẋ = Ãδx + B̃δu. ❑ where à = df/dx is the Jacobian of the state matrix and B̃ = du/dx is the Jacobian of the input matrix, both evaluated at the equilibrium point [xe, ue] . ❑ Computation of à and B̃ yields the following linear system δẋ = 0 1 0 2g d 0 −2 q Cg M 0 0 −R L δx + 0 0 1 L δu MR © ˆ Lecture 2 35/35
Download


![❑ Introduce new variables δx = x − x0 and δu = u − u0.
❑ Expand the nonlinear equation into McLaurin series around the
equilibrium and keep only the first order terms:
ẋ0 + δẋ ≈ f(x0, u0) + Aδx + Bδu,
where A and B are Jacobians of f with respect to x and u,
evaluated at (x0, u0), that is:
A =
∂f
∂x
(x0, u0); B =
∂f
∂u
(x0, u0)
I.e. the elements of A and B are given by:
A = [aij], where [aij] =
∂fi
∂xj
,
B = [bij], where [bij] =
∂fi
∂uj
.
❑ The system:
δẋ = Aδx + Bδu, (13)
is called the linearization of the nonlinear model ẋ = f(x, u) at
(x0, u0).
MR © ˆ Lecture 2 24/35](https://image.slidesharecdn.com/ch3-250618233045-879c1d2e/75/CH3-2-control-systens-2-slides-study-pdf-24-2048.jpg)
![System Dynamics
❑ Expressing the system dynamics in terms of the state variables
yields the following equations
ẋ1 = x2
ẋ2 = g −
C
M
x3
x1
2
ẋ3 =
1
L
(u − Rx3)
(15)
with f = [ẋ1, ẋ2, ẋ3]T
and ẋ = [x1, x2, x3]T
.
❑ Clearly, the system dynamics are non-linear.
❑ it is preferable to linearize the system about an equilibrium point.
❑ The equilibrium points of a system are found by setting f = 0 and
solving for x1, x2, x3, u.
❑ Since there are four variables to solve for and only three equations,
the system is underdetermined.
MR © ˆ Lecture 2 33/35](https://image.slidesharecdn.com/ch3-250618233045-879c1d2e/75/CH3-2-control-systens-2-slides-study-pdf-33-2048.jpg)
![Determining the Equilibrium Point
❑ This can be remedied by setting x1(t) = d , where d (desired) is the
height set point.
❑ Solving for the variables yields the following equilibrium point
❑ (Note: we are interested in the equilibrium point (e) corresponding
to levitation of the steel ball. The equilibrium point corresponding
to x3 = 0 is not of interest since this implies the electromagnet is
turned off).
x1,e = d
x2,e = 0
x3,e = d
r
Mg
C
ue = dR
r
Mg
C
(16)
with f(xe) = [x1,e, x2,e, x3,e]T
.
MR © ˆ Lecture 2 34/35](https://image.slidesharecdn.com/ch3-250618233045-879c1d2e/75/CH3-2-control-systens-2-slides-study-pdf-34-2048.jpg)
![Linearizing the System Dynamics
❑ The linearized system describes the system dynamics relative to the
equilibrium point.
❑ We define δx = x − xe and δu = u − ue as the deviations of the
state and control from the equilibrium point, respectively.
❑ The linearized system dynamics are given by
δẋ = Ãδx + B̃δu.
❑ where à = df/dx is the Jacobian of the state matrix and
B̃ = du/dx is the Jacobian of the input matrix, both evaluated at
the equilibrium point [xe, ue] .
❑ Computation of à and B̃ yields the following linear system
δẋ =
0 1 0
2g
d 0 −2
q
Cg
M
0 0 −R
L
δx +
0
0
1
L
δu
MR © ˆ Lecture 2 35/35](https://image.slidesharecdn.com/ch3-250618233045-879c1d2e/75/CH3-2-control-systens-2-slides-study-pdf-35-2048.jpg)















































