Downloaded 185 times


![Adjacency Matrix
double vertex[][];
1
23
4
1
-31 2 3
1 ∞ 4 -3
2 ∞ ∞ ∞
3 ∞ 1 ∞](https://image.slidesharecdn.com/dagajal-150302145746-conversion-gate02/85/Directed-Acyclic-Graph-27-320.jpg)
![Adjacency List
EdgeList vertex[];
1
23
4
1
-3
1
2
3
3 -3 2 4
2 1
neighbour cost](https://image.slidesharecdn.com/dagajal-150302145746-conversion-gate02/85/Directed-Acyclic-Graph-28-320.jpg)
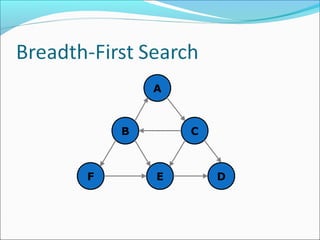
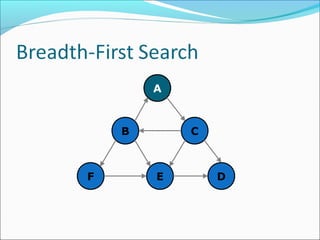
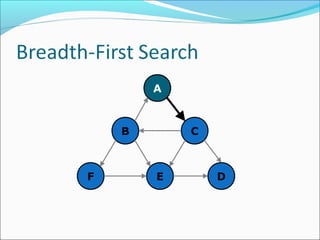
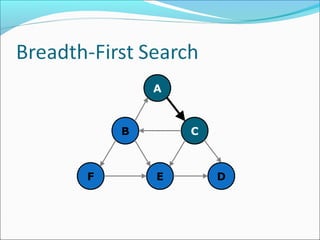
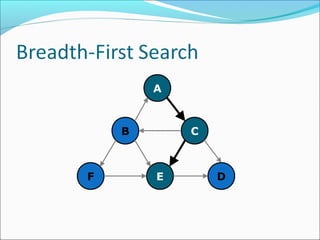
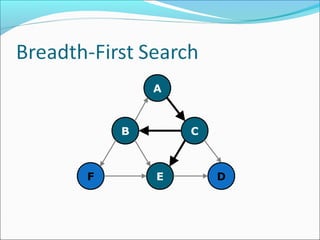
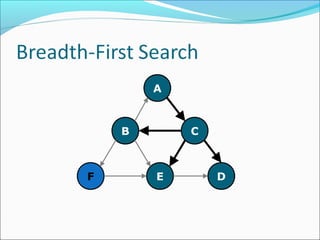
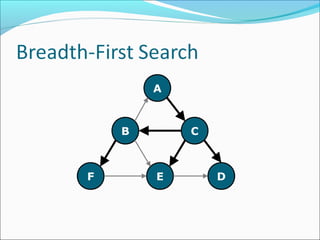
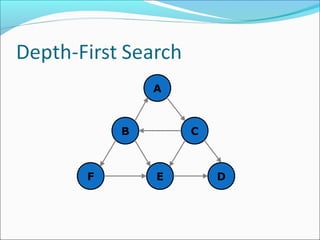
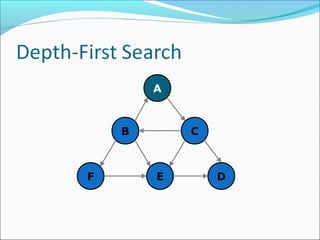
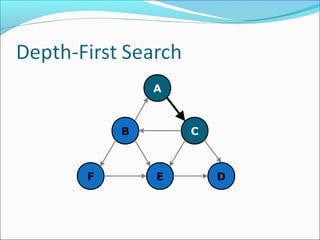
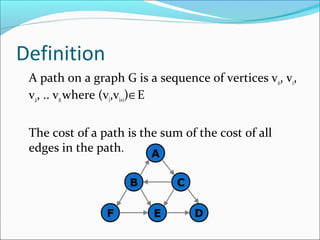
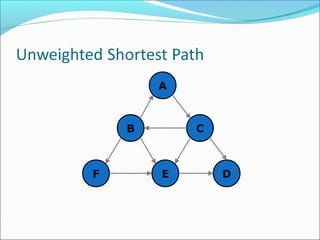
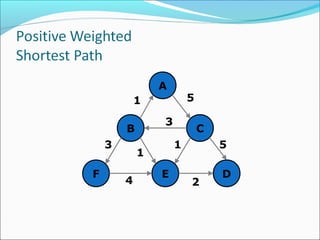
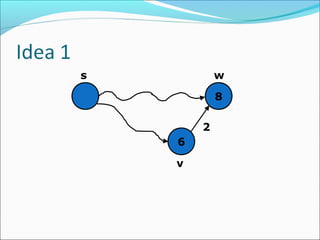
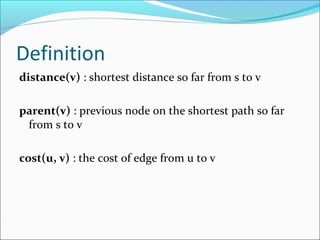
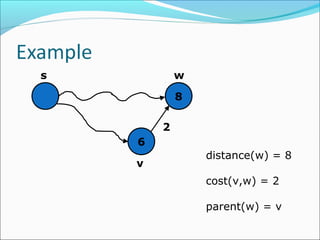
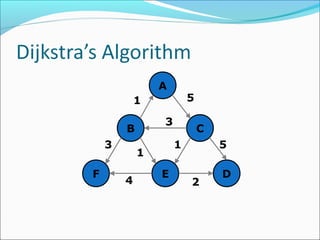
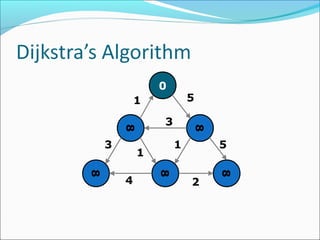
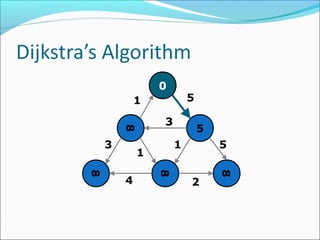
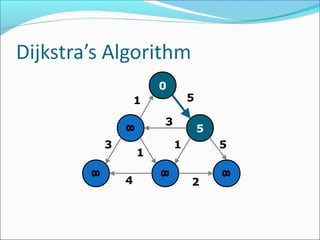
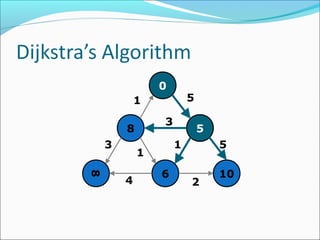
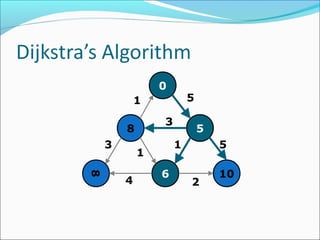
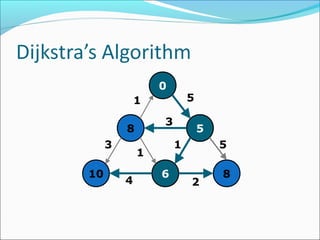
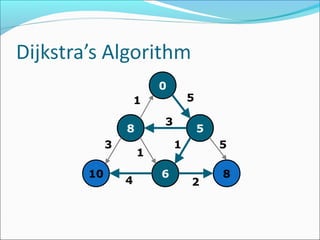
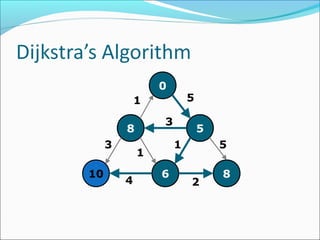
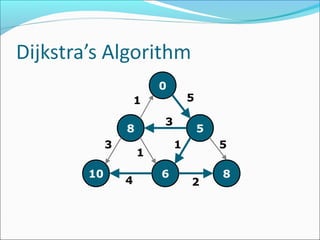
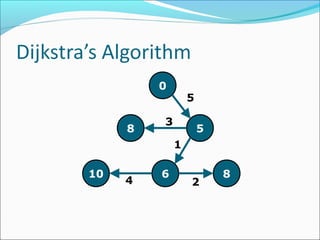
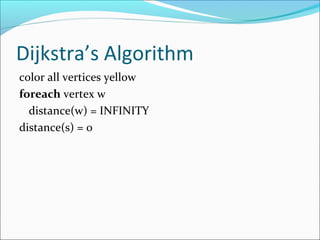
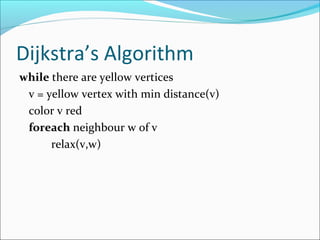
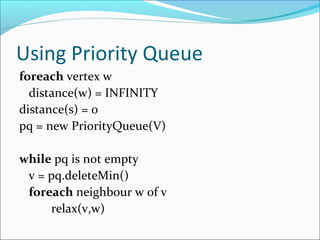
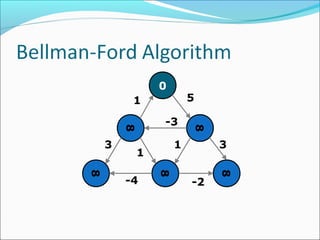
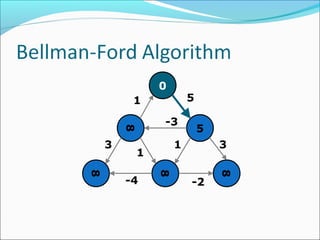
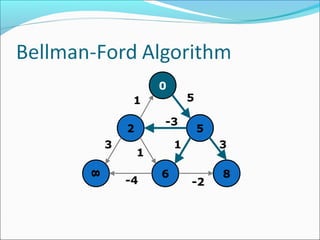
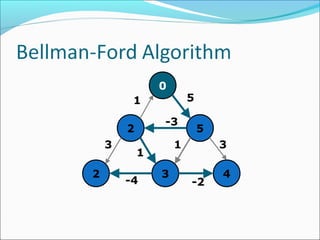
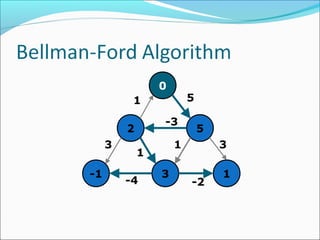
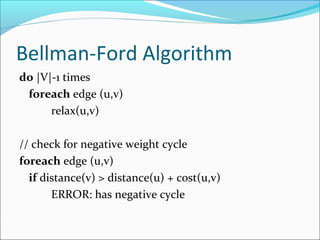
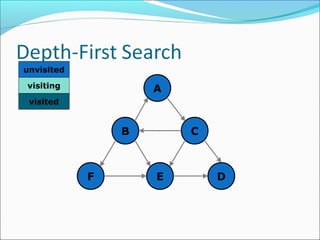
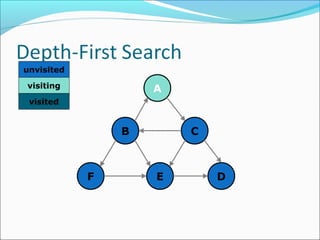
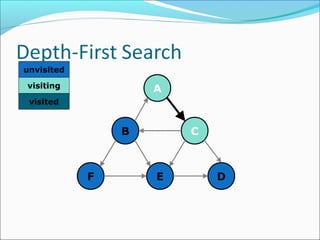
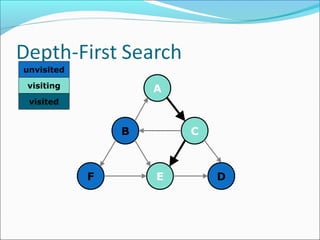
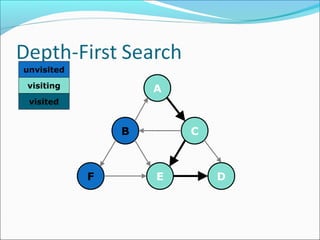
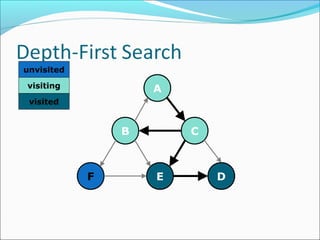
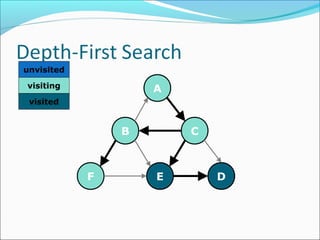
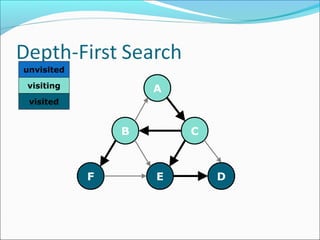
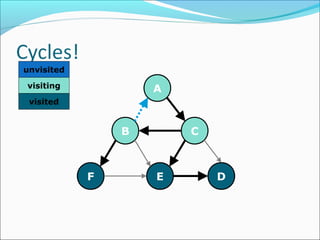
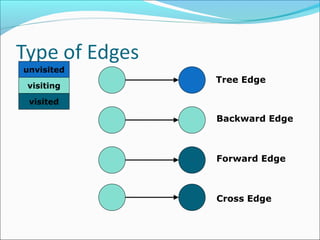

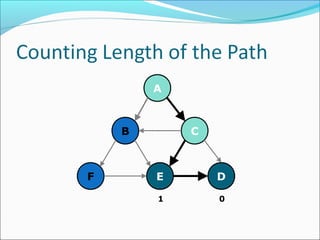
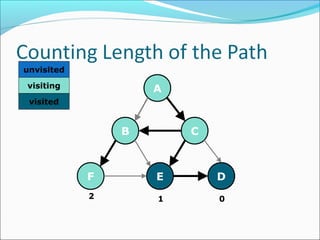
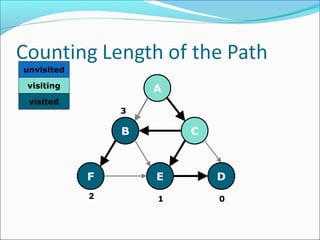
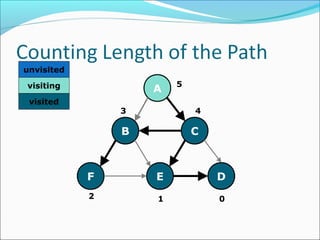
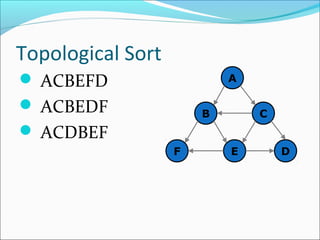

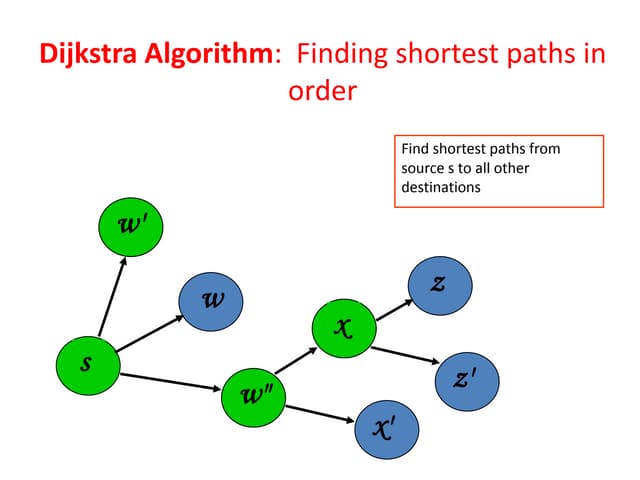
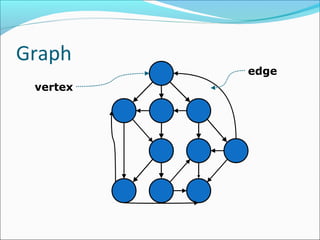
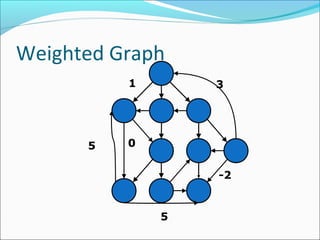
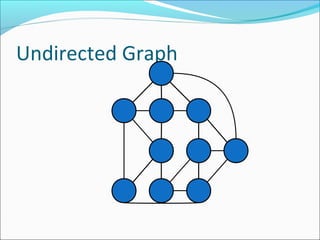
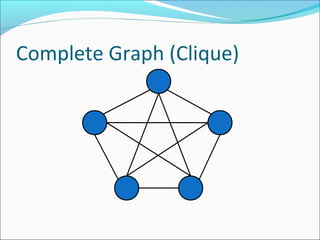
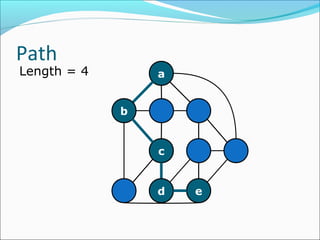
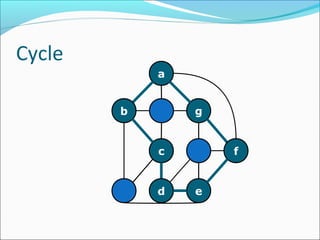
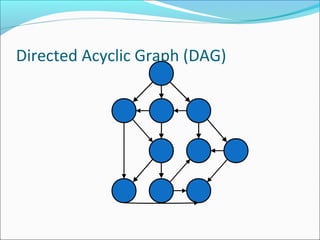
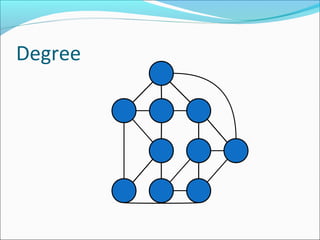
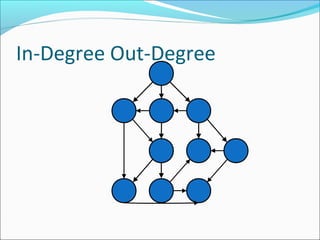
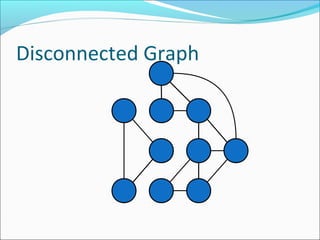
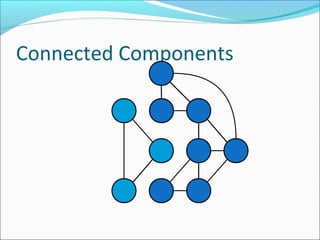
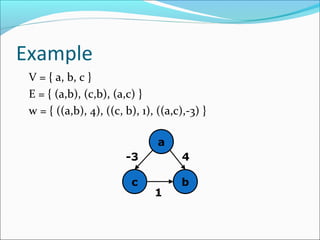
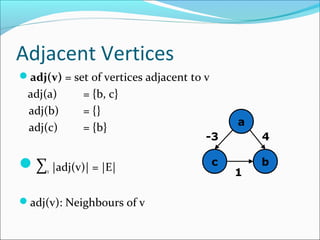
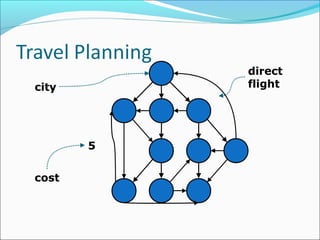
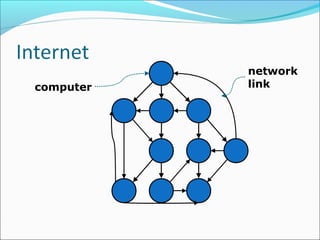
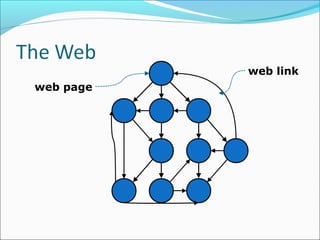
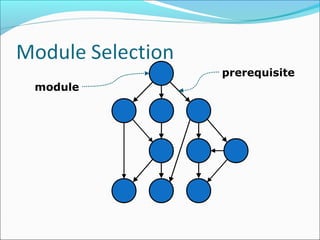
The document discusses using graphs to model real-world problems and algorithms for solving graph problems. It introduces basic graph terminology like vertices, edges, adjacency matrix/list representations. It then summarizes algorithms for finding shortest paths like Dijkstra's and Bellman-Ford. It also discusses using depth-first search to solve problems like detecting cycles, topological sorting of vertices, and calculating longest paths in directed acyclic graphs.