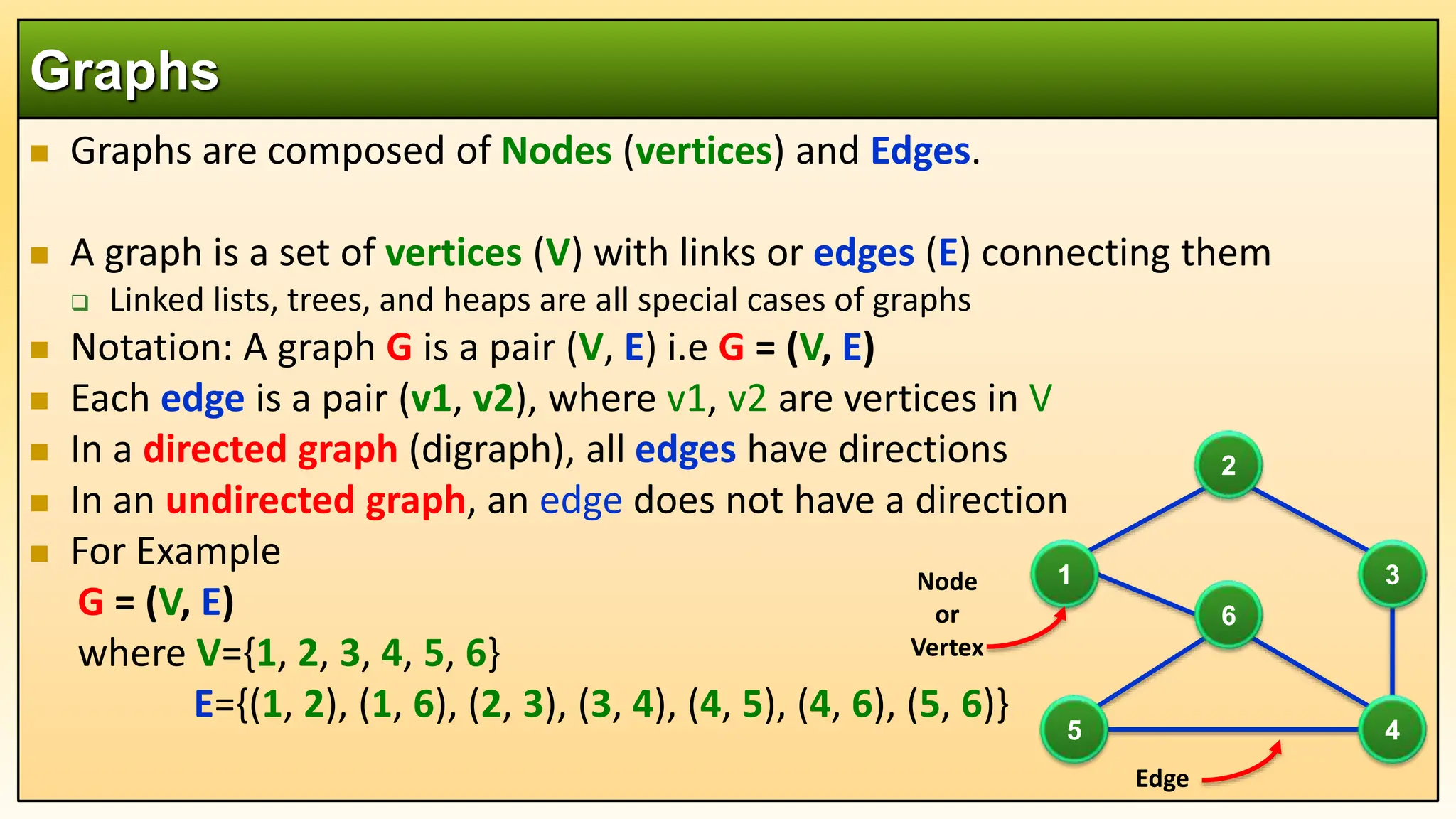
The document provides an overview of graph structures, including definitions of vertices, edges, directed and undirected graphs, paths, cycles, and connectedness. It also discusses applications of graphs, traversal algorithms (Depth-First Search and Breadth-First Search), and different ways to represent graphs (adjacency matrix and adjacency list). Additionally, examples of graph usage in various contexts, such as computer networks and maze solving, are presented.





![ There are at least two ways of representing graphs:
The adjacency matrix representation
The adjacency list representation
An adjacency matrix for a graph with n vertices numbered
0,1,...,n-1 is an n by n array matrix such that matrix[i][j] is 1
(true) if there is an edge from vertex i to vertex j and 0
(false) otherwise.
When the graph is weighted, we can let matrix[i][j] be the
weight that labels the edge from vertex i to vertex j
instead of simply 1, and let matrix[i][j] equal to ∞ instead
of 0 when there is no edge from vertex i to vertex j
Adjacency matrix for an undirected graph is symmetrical.
i.e. matrix[i][j] is equal to matrix[j][i]
Graph Implementation
A B
D
C
A Graph
A B C D
A 0 0 1 1
B 0 0 0 0
C 1 0 0 1
D 1 0 1 0
Adjacency Matrix](https://image.slidesharecdn.com/ds21graphtheory-240518111432-3ad75bce/75/Data-Structures-and-Agorithm-DS-21-Graph-Theory-pptx-9-2048.jpg)




![#include <iostream>
#include <map>
#include <list>
using namespace std;
class Graph {
public:
map<int, bool> visited;
map<int, list<int> > adj;
void addEdge(int v, int w); // function to add an edge to graph
void DFS(int v); // DFS traversal of the vertices reachable from v
};
void Graph::addEdge(int v, int w){
adj[v].push_back(w); // Add w to v’s list.
}
void Graph::DFS(int v)
{
visited[v] = true; // Mark the current node as visited and
cout << v << " "; // print it
16
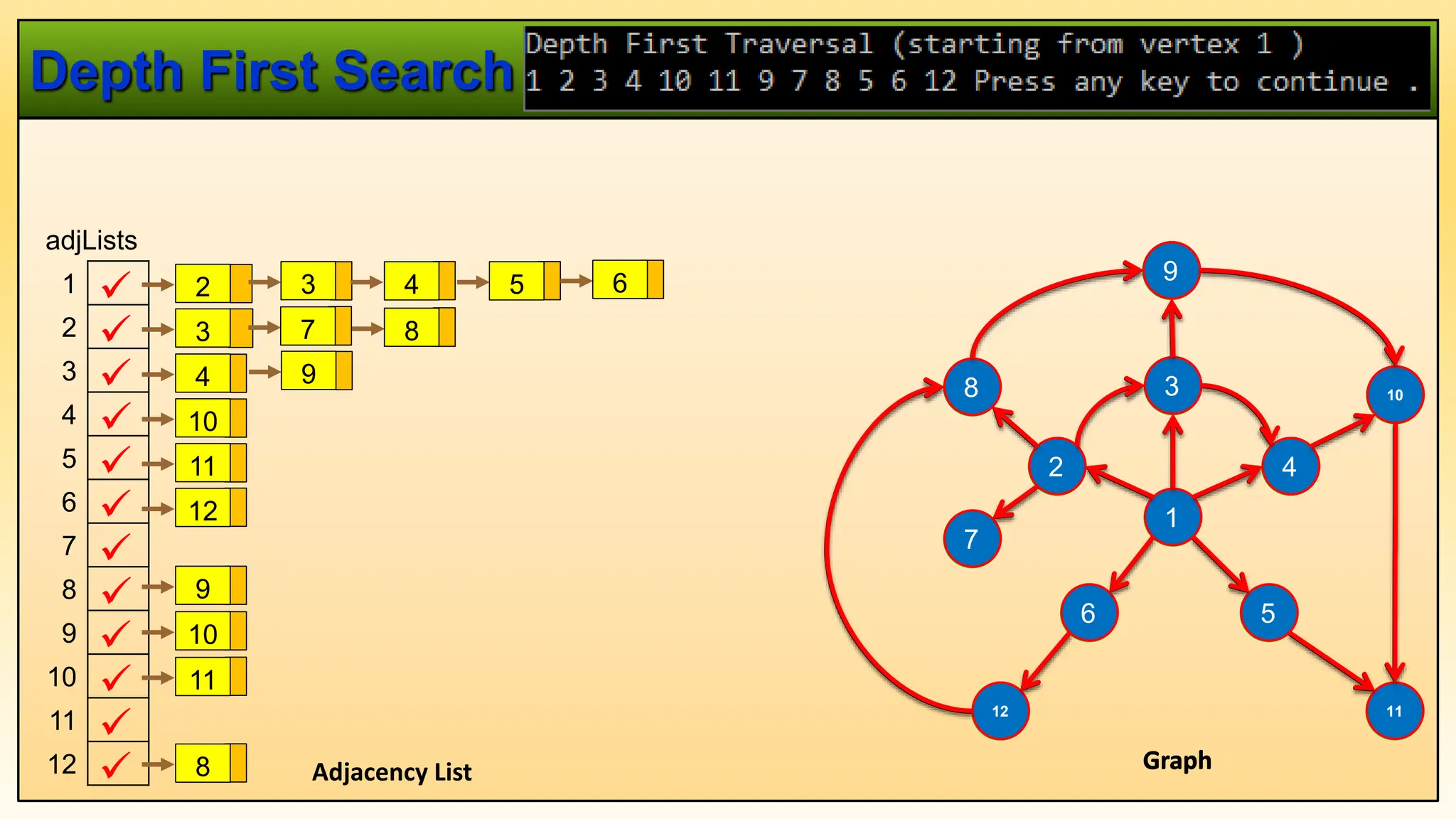
Example 1: Depth First Search
1](https://image.slidesharecdn.com/ds21graphtheory-240518111432-3ad75bce/75/Data-Structures-and-Agorithm-DS-21-Graph-Theory-pptx-16-2048.jpg)
![// Recur for all the vertices adjacent to this vertex
list<int>::iterator i;
for (i = adj[v].begin(); i != adj[v].end(); ++i)
if (!visited[*i])
DFS(*i);
}
int main() {
Graph g; // Create a graph given in the above diagram
int Start = 1;
g.addEdge( 1, 2); g.addEdge(1, 3); g.addEdge(1, 4); g.addEdge(1, 5); g.addEdge(1, 6);
g.addEdge( 2, 3); g.addEdge(2, 7); g.addEdge(2, 8);
g.addEdge( 3, 4); g.addEdge(3, 9);
g.addEdge( 4,10); g.addEdge( 5,11);
g.addEdge( 6,12); g.addEdge( 8, 9);
g.addEdge( 9,10); g.addEdge(10,11); g.addEdge(12, 8);
cout << "Depth First Traversal (starting from vertex "<< Start << " ) n";
g.DFS(Start);
system ("PAUSE"); return 0;
}
17
Example 1: Depth First Search
2](https://image.slidesharecdn.com/ds21graphtheory-240518111432-3ad75bce/75/Data-Structures-and-Agorithm-DS-21-Graph-Theory-pptx-17-2048.jpg)


![#include <iostream>
#include <map>
#include <list>
using namespace std;
class Graph {
public:
map<int, bool> visited;
map<int, list<int> > adj;
list<int> queue;
void addEdge(int v, int w);// function to add an edge to graph
void BFS(int v); // BFS traversal of the vertices reachable from v
};
void Graph::addEdge(int v, int w){
adj[v].push_back(w); // Add w to v’s list.
}
20
Example 2: Breadth First Search
1](https://image.slidesharecdn.com/ds21graphtheory-240518111432-3ad75bce/75/Data-Structures-and-Agorithm-DS-21-Graph-Theory-pptx-20-2048.jpg)
![void Graph::BFS(int v)
{
visited[v] = true; // Mark the current node as visited and
queue.push_back(v); // and put it in a queue
list<int>::iterator i; // 'i' will be used to get all adjacent vertices of a vertex
while(!queue.empty()) {
v = queue.front(); // Get a vertex from queue and print it
queue.pop_front();
cout << v << " ";
// Recur for all the vertices adjacent to this vertex
list<int>::iterator i;
for (i = adj[v].begin(); i != adj[v].end(); ++i){
if (!visited[*i])
{
visited[*i] = true;
queue.push_back(*i);
}
}
}
}
21
Example 2: Breadth First Search
2](https://image.slidesharecdn.com/ds21graphtheory-240518111432-3ad75bce/75/Data-Structures-and-Agorithm-DS-21-Graph-Theory-pptx-21-2048.jpg)