Download as PDF, PPTX

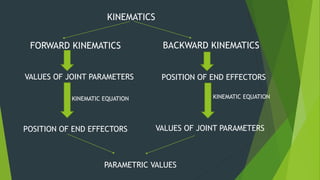


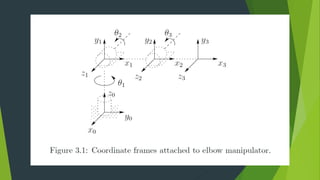
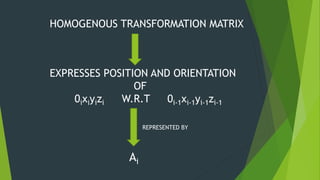
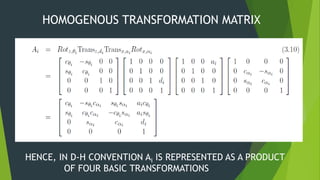
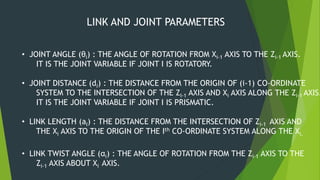
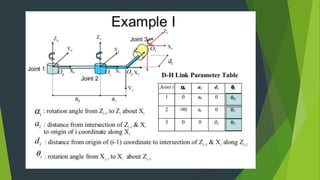

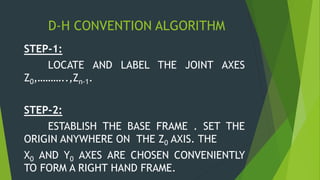
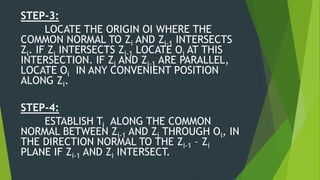

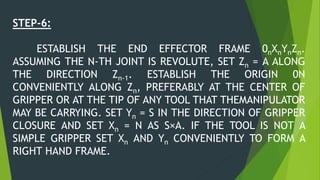
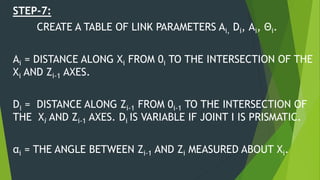

The Denavit-Hartenberg (D-H) convention provides a standardized method to define coordinate frames for each link of a robot manipulator. It uses four parameters - link length (ai), joint angle (αi), link offset (di), and joint twist (θi) - to define the transformation from one link's frame to the next. By applying the homogeneous transformation matrices for each link according to their D-H parameters, the forward kinematics can be calculated to determine the end effector position from the joint parameters. The D-H convention reduces the number of parameters needed compared to other methods.























































































