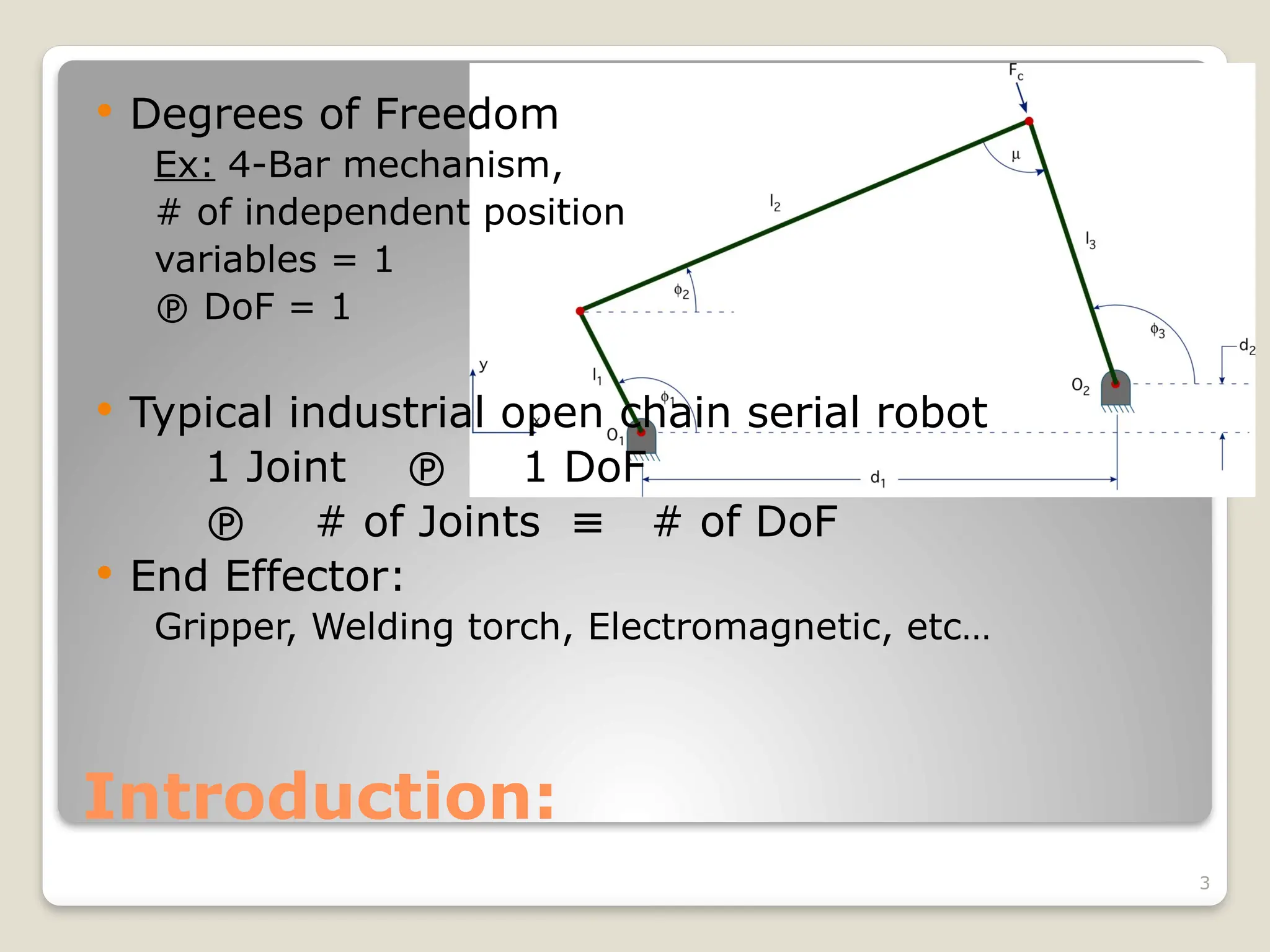
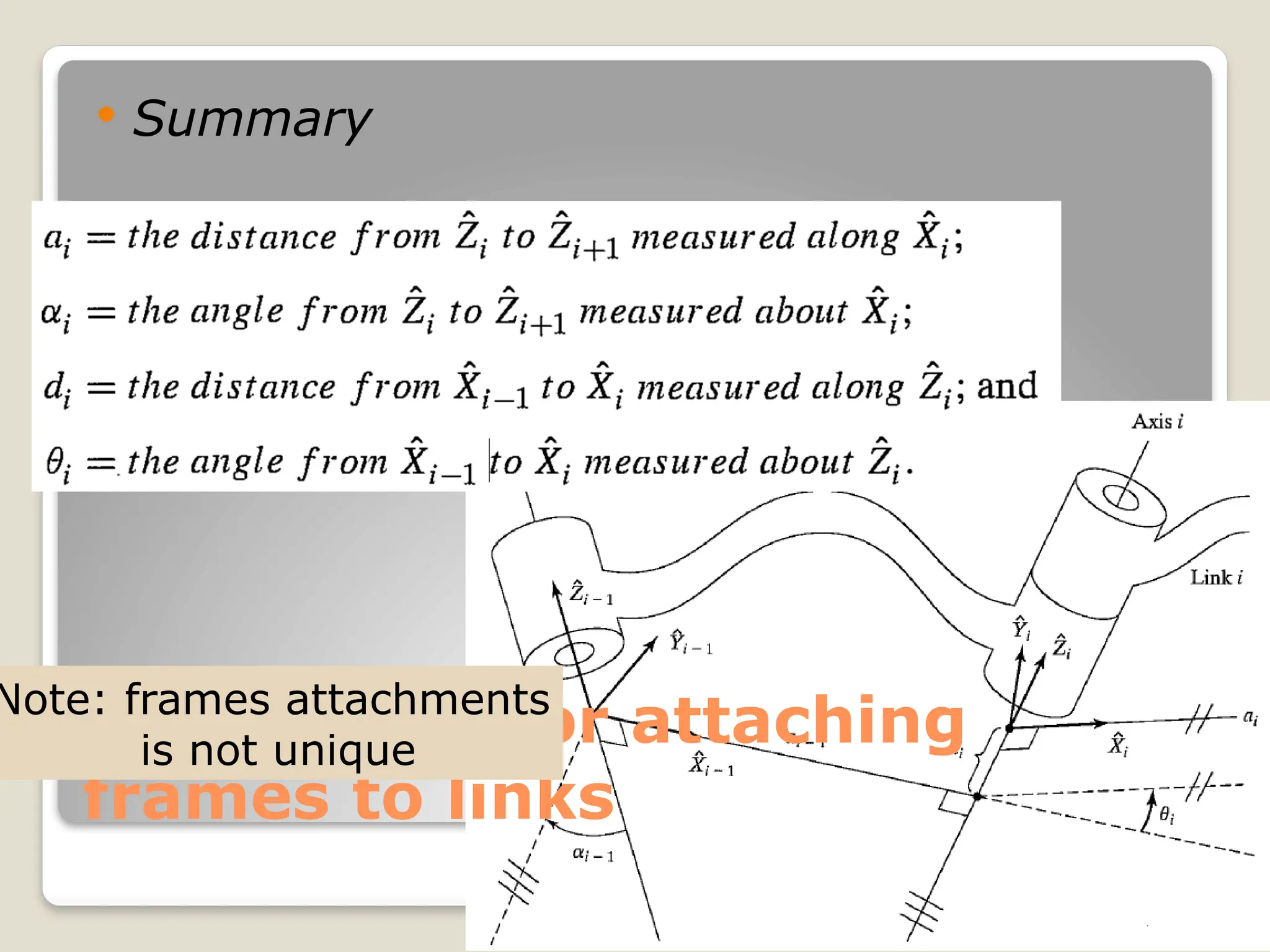
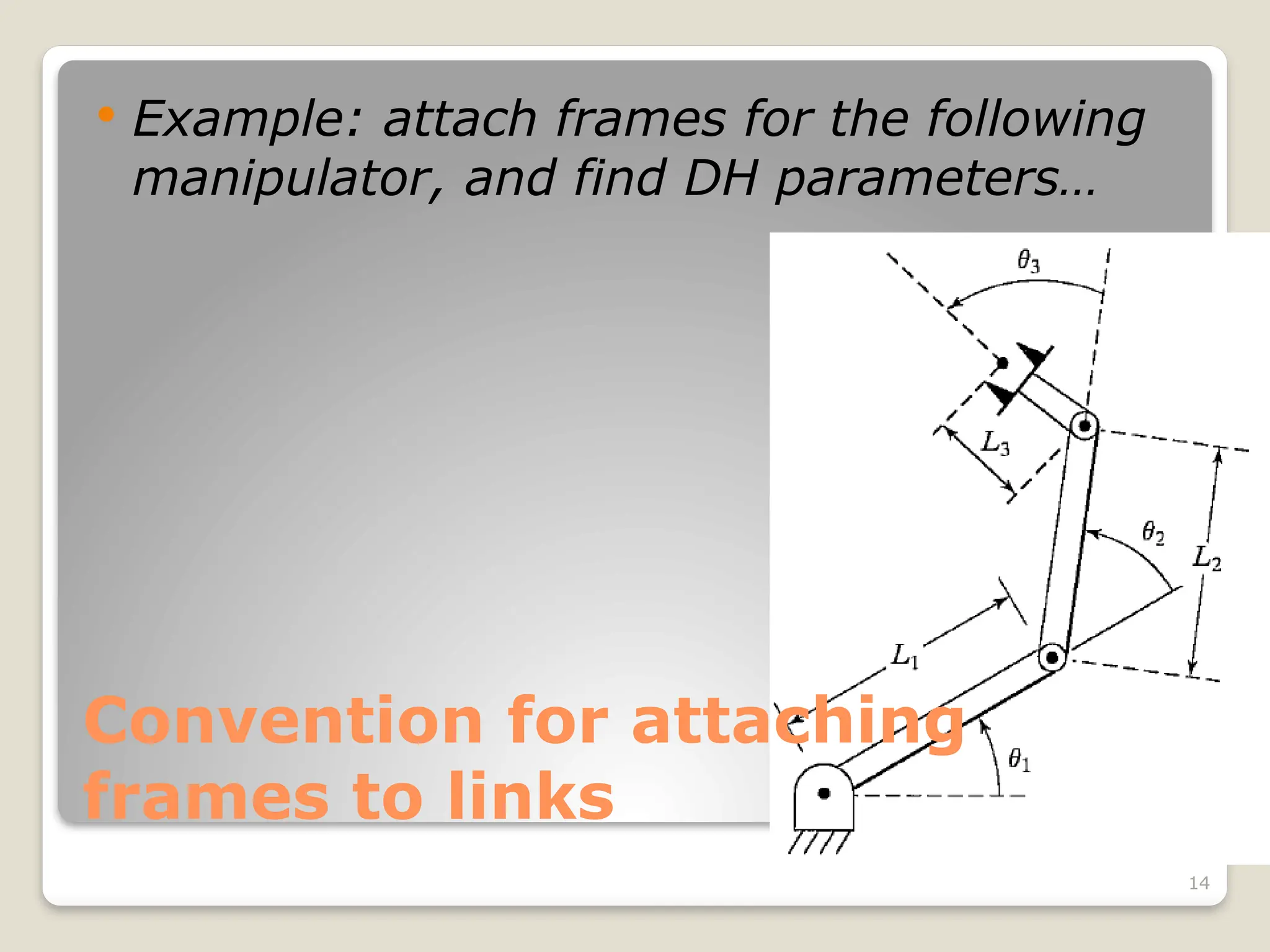
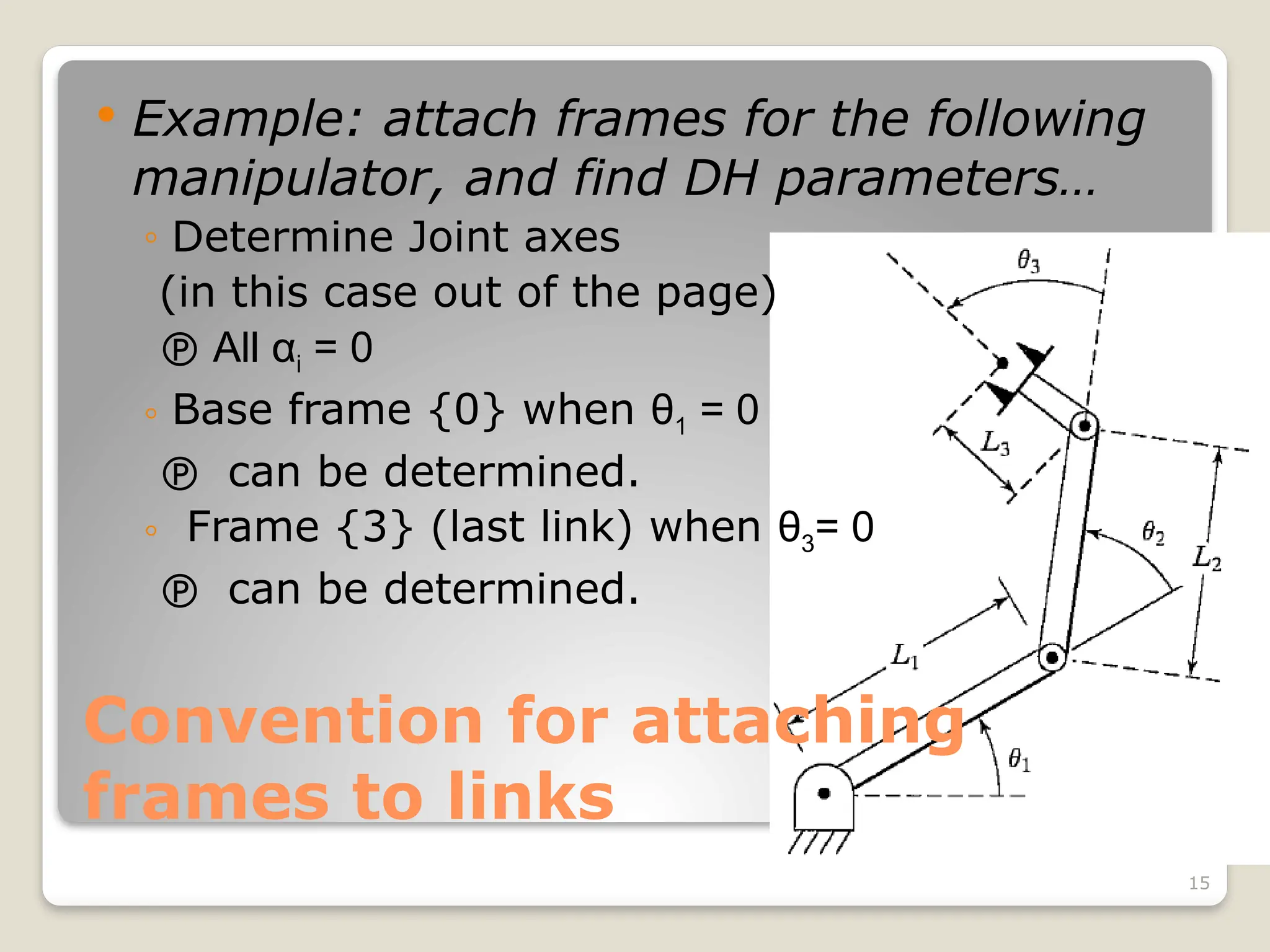
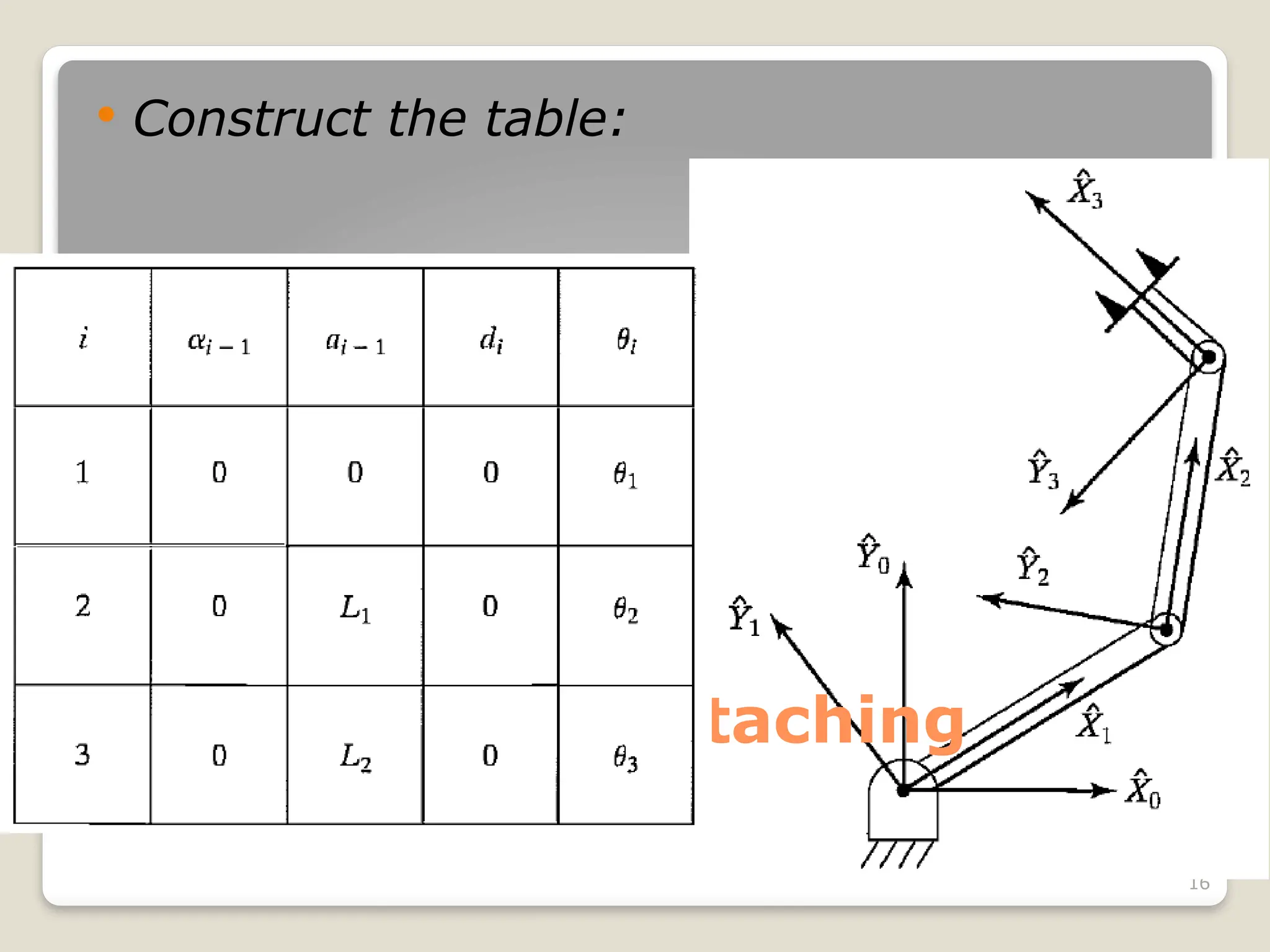
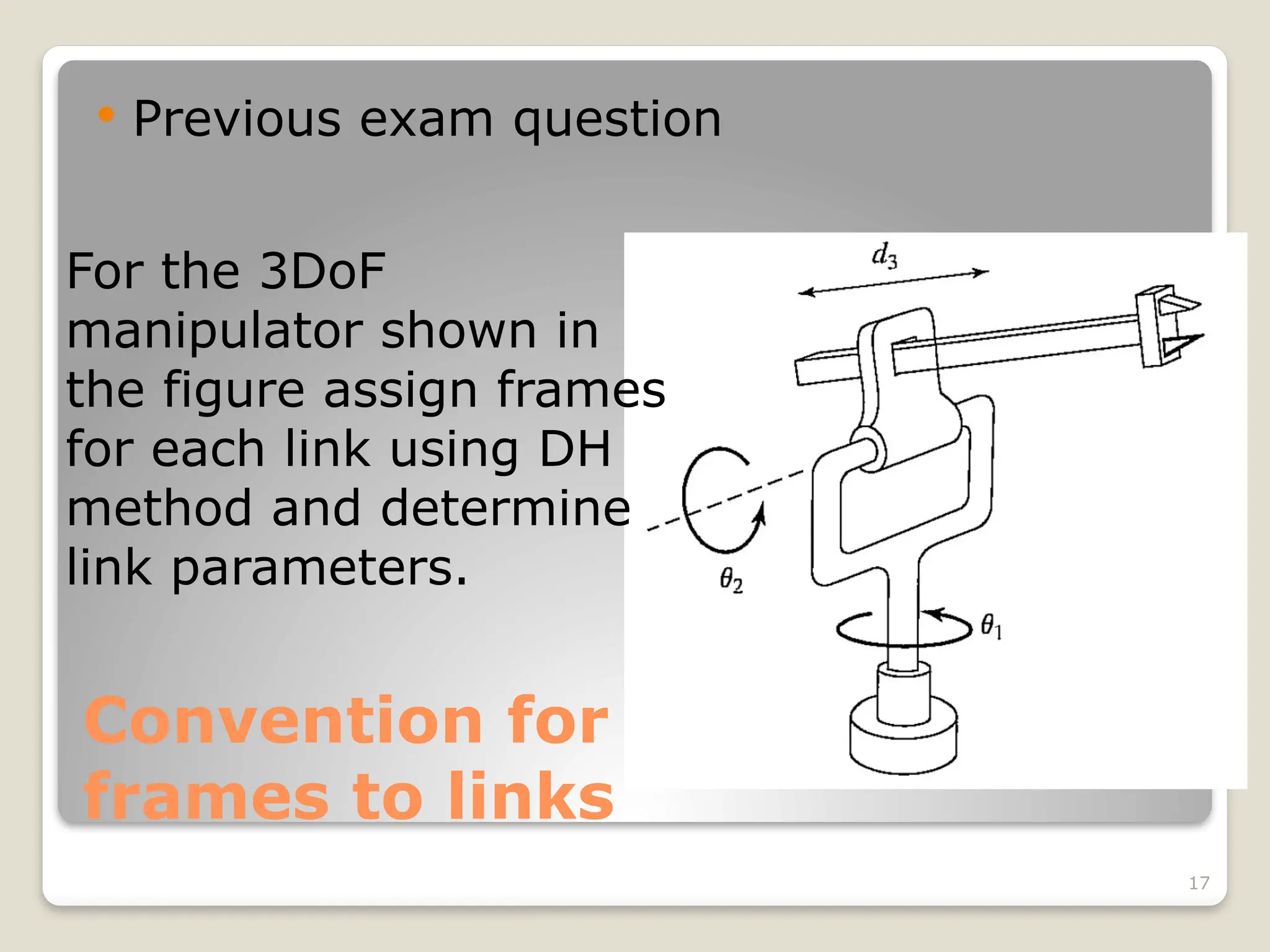
The document provides an overview of manipulator kinematics, focusing on the concepts of motion without regard to forces, degrees of freedom, and the kinematic description of robotic mechanisms. It discusses the Denavit-Hartenberg convention for defining the relationships between links and joints, including parameters such as joint angles and lengths. Practical examples are presented to illustrate the attachment of frames to each link and the calculation of corresponding parameters.