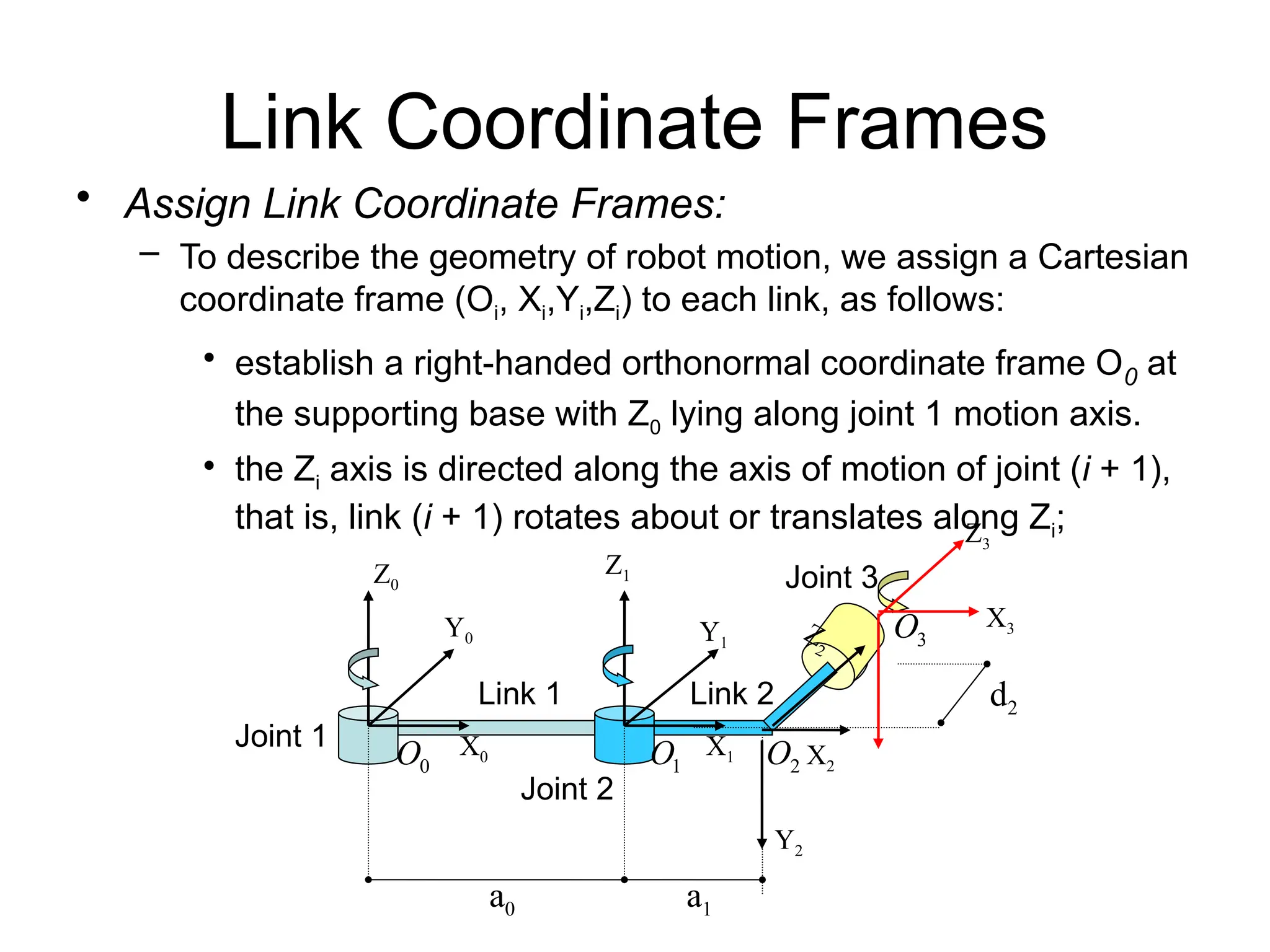
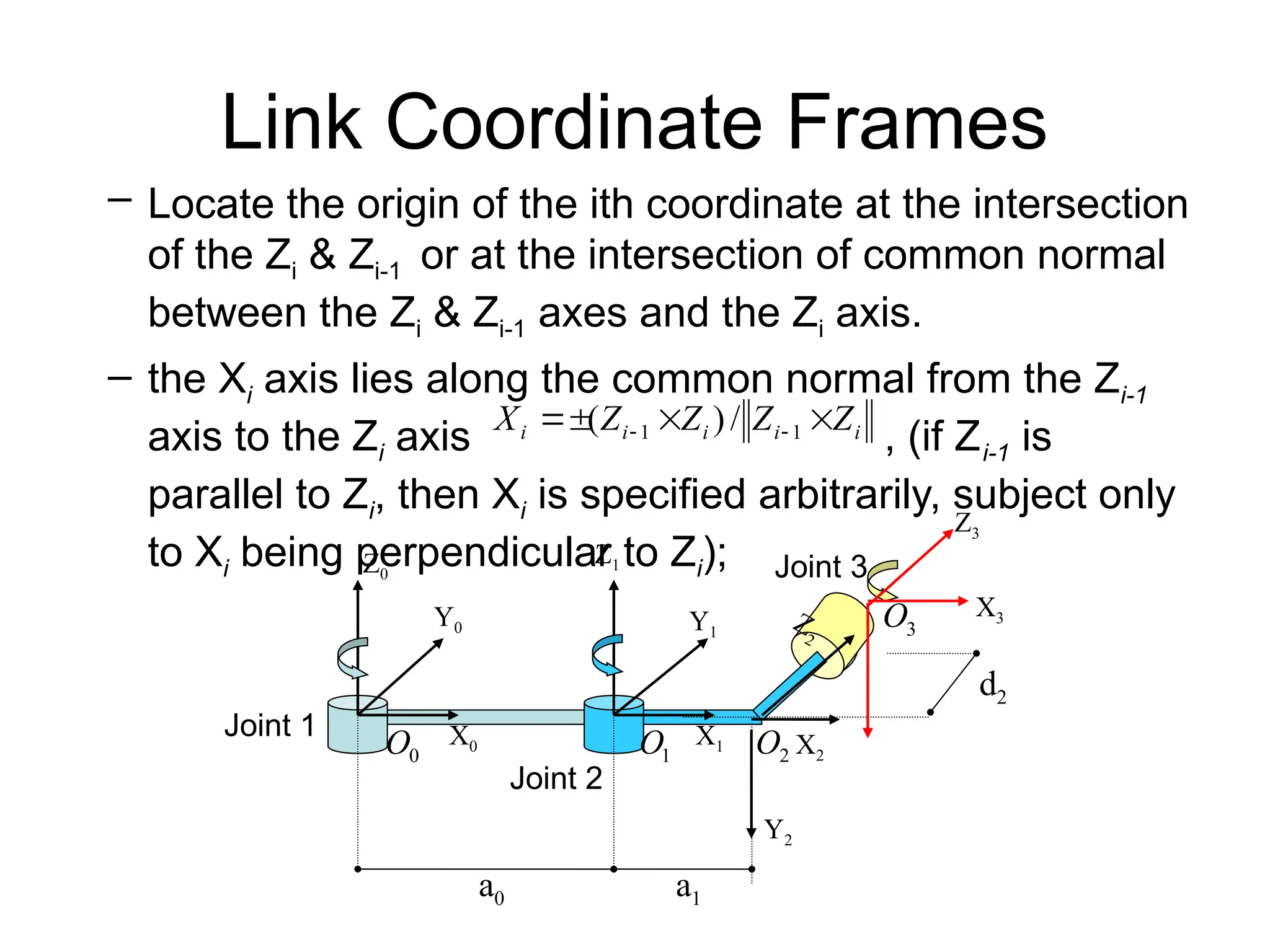
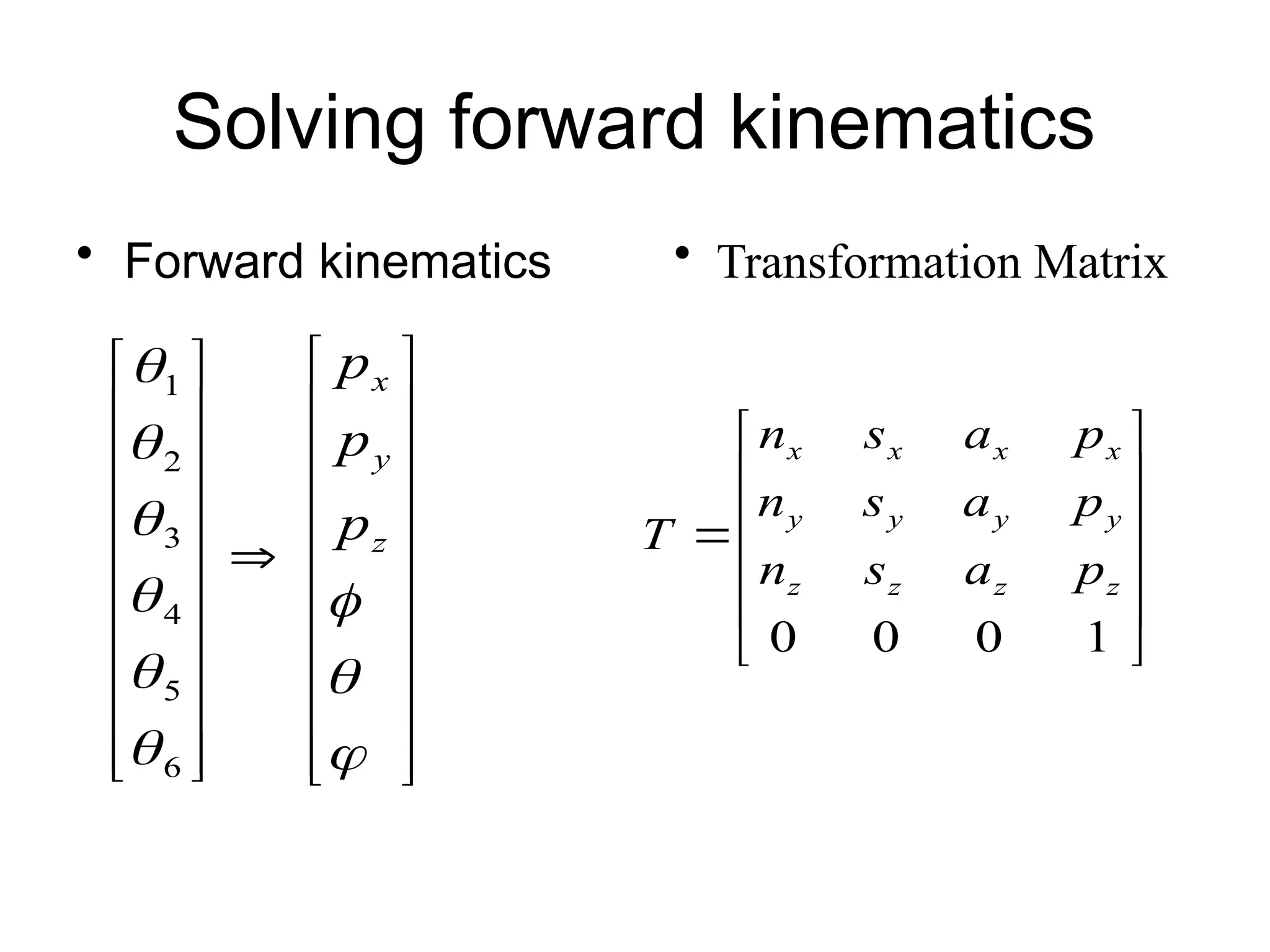
The document outlines the Denavit-Hartenberg convention used for robot kinematics, detailing how to assign coordinate frames to joints and links in robotic systems. It describes the steps for establishing the base coordinate system, locating joint axes, and finding link and joint parameters. Additionally, it includes transformations for forward kinematics and provides an example with a Puma 260 robot model.