Downloaded 69 times

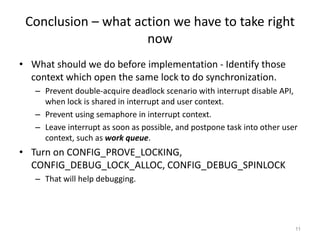
![Appendix-context switch• Context-switch code
– Restore and jump should be combined to a atomic operation.
Copyright 2009 FUJITSU LIMITED 13
Timer interrupt code :
…
If thread ‘s time slice is decreased to zero.
{
save r0~r15 into current ’s TCB;
restore B’s r0~r14 registers;
jump r15 <- B’s TCB[15] + 3
}
return from interrupt;
Spin_lock(&mutex_lock);
…
…
Spin_unlock(&mutex_lock);
…
…
Sleep(2000ms);
…
…
Sema_get(&mutex_lock)
Sleep function (kernel code ):
…
…
save r0~r1 into current’s TCB;
restore A’s r0~r14 registers;
jump r15 <- A’s TCB[15] + 3
return ;
semaphore function (kernel code ):
….
if lsemaphore is zero {
save r0~r14 into current’s TCB;
restore A’s r0~r14 registers;
jump r15 <- B’s TCB[15] + 3
}
return ;
Thread A
Thread B
1
2
3
4
5](https://image.slidesharecdn.com/7-150106113216-conversion-gate01/85/Dead-Lock-Analysis-of-spin_lock-in-Linux-Kernel-english-14-320.jpg)

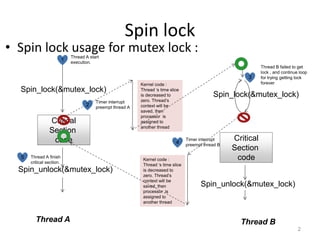
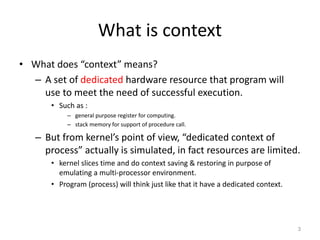
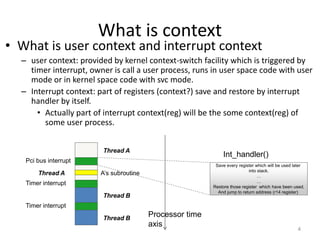
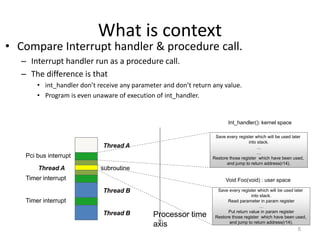
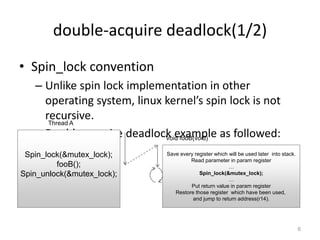
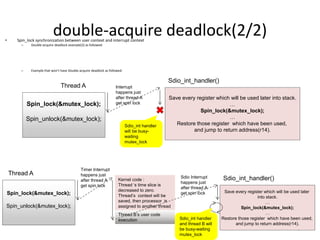
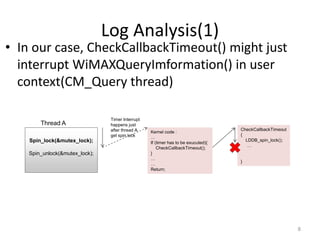
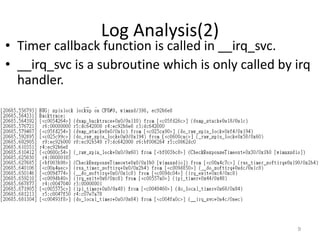
The document discusses spin locks and semaphores in the Linux kernel. It begins with an introduction to the difference between spin locks and semaphores. Spin locks cause threads to continuously loop trying to acquire the lock, while semaphores cause threads to sleep. An example is given of a deadlock scenario that can occur with spin locks. The document then discusses the concept of context in the kernel, including user context, interrupt context, and the control flow during procedure calls and interrupts. Log analysis and examples of double-acquire deadlocks involving spin locks are provided. The document concludes with recommendations for how to prevent deadlocks, such as using spin_lock_irqsave/restore and avoiding semaphores in interrupt context.