Downloaded 118 times

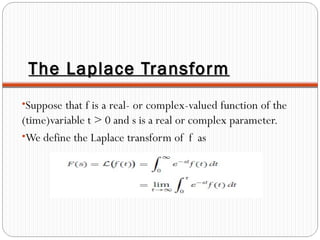

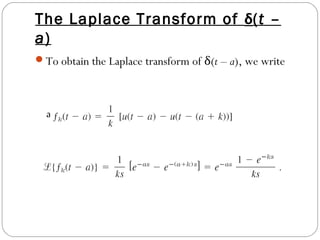
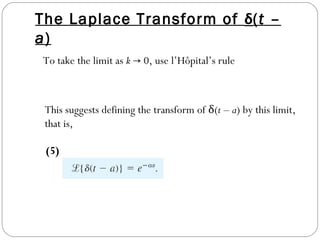
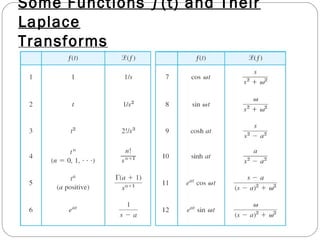
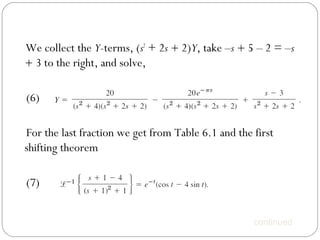
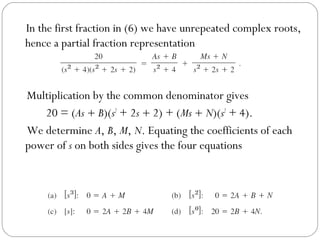


- The document is a report on Laplace transforms prepared by 4 students for their Civil Engineering department. - It provides definitions and examples of the Laplace transform, including the transforms of common functions and the inverse Laplace transform. - One example shows using Laplace transforms to solve a differential equation modeling damped vibrations.