Downloaded 840 times
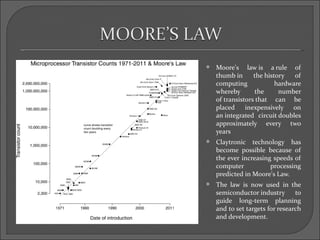



The document discusses Claytronics, which aims to create programmable matter through the use of nanoscale robots called catoms. Catoms would be able to move and interact with each other to form tangible 3D objects. The document outlines several approaches being researched and developed to achieve this, including planar catoms that use electrostatic forces, giant helium catoms to study physical forces, and magnetic resonance coupling for wireless power transfer. Programming languages like MELD and LDP are being designed to control large ensembles of catoms in a distributed, fault-tolerant manner.





































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)















