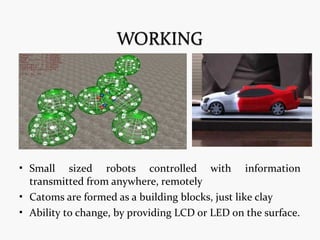
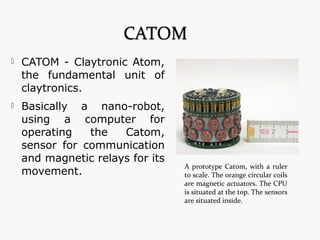
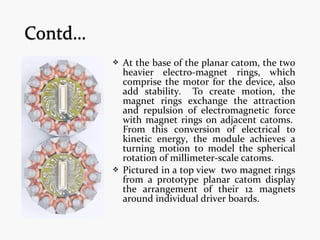
Claytronics is a proposed technology that uses programmable matter composed of individual nanoscale computers called catoms. Catoms can interact with each other to form tangible 3D objects and environments that users can interact with. Each catom contains a CPU, sensors, and actuators that allow it to move and rearrange itself. Objects made from catoms can change their shape and properties in real time. Claytronics aims to create synthetic realities similar to science fiction concepts like holodecks. It has applications for interactive 3D displays, remote operation, self-healing structures, and advanced manufacturing. Significant technological challenges remain in developing catoms small enough to assemble into everyday objects and programming them to coordinate their behavior.

![JOURNALS:
[1] C. Mirkin. Programming the Assembly of Two- and Three-
Dimensional Architectures with DNA and Nanoscale Inorganic Building
Blocks. Inorg. Chem., 39:2258–72, 2000.
[2] S. Murata, H. Kurokawa, and S. Kokaji. Self-assembling machine. In
International Conference on Robotics and Automation, pages 441–448,
San Diego, CA., May 1994.
[3] S. Murata, H. Kurokawa, E. Yoshida, K. Tomita, and S. Kokaji. A 3d
selfreconfigurable structure. In Proc. of the IEEE International Conf. on
Robotics and Automation, pages 432–439, Leuven, Belgium, May 1998.
[4] Radhika Nagpal. Programmable Self-Assembly: Constructing Global
Shape using Biologically-inspired Local Inter- actions and Origami
Mathematics. PhD thesis, MIT Department of Electrical Engineering and
Computer Science, June 2001.](https://image.slidesharecdn.com/claytronics-170910041835/85/Claytronics-23-320.jpg)





































































