Downloaded 41 times
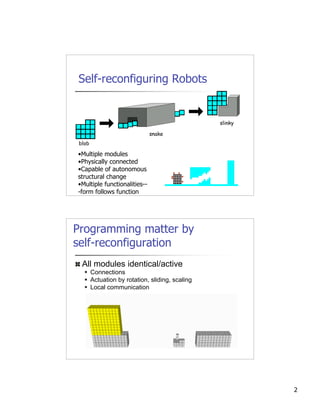



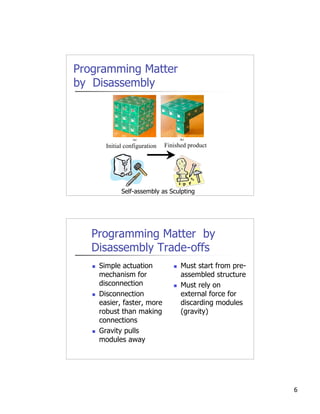
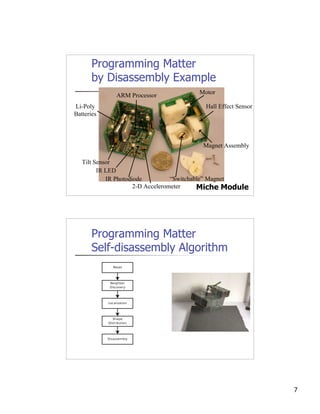


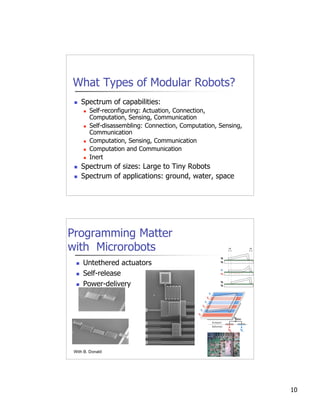
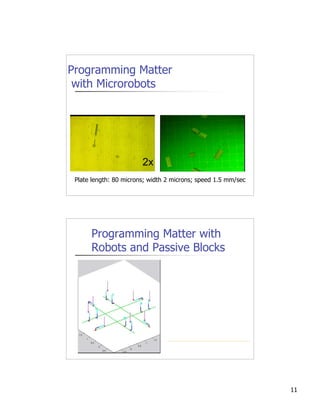


This document discusses programmable matter using modular robots. Modular robots are more versatile than fixed architecture robots as they can change locomotion and manipulation gaits, self-assemble, and self-repair. The document outlines different types of modular robots including self-reconfiguring robots made of multiple connected modules that can autonomously change structure. It provides examples of programming matter through distributed control rules for self-reconfiguration and disassembly. Future directions discussed include using microrobots and combining robots with passive blocks for fully programmable matter.