





























![3) Emotion time :
it is time elapsed during emotional sensations & Disturbance
such as fear , anger ,etc. with reference to the situation .
4) Volition time :
volition time is the time taken for the final action.
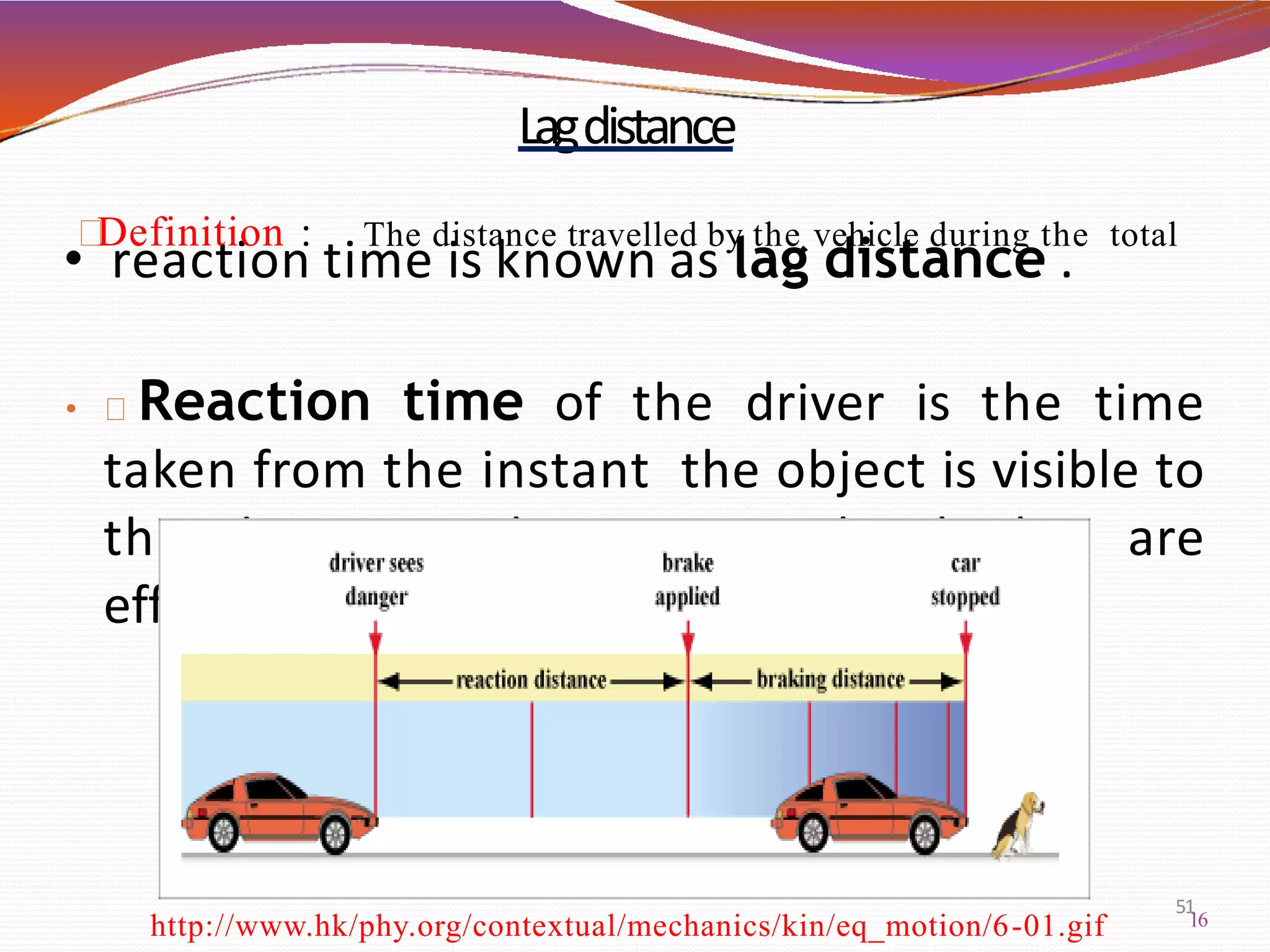
Lag distance = v * t
55
Where, v = speed of vehicle in m/s
t = total reaction time (s) [ as per IRC t = 2.5 s ]
g= acceleration due to gravity = 9.8 m/sec2
f= coefficient of friction (0.4 to 0.35) 55](https://image.slidesharecdn.com/chapter-2roadgeometrics-200615103002/75/Chapter-2-Road-geometrics-55-2048.jpg)













































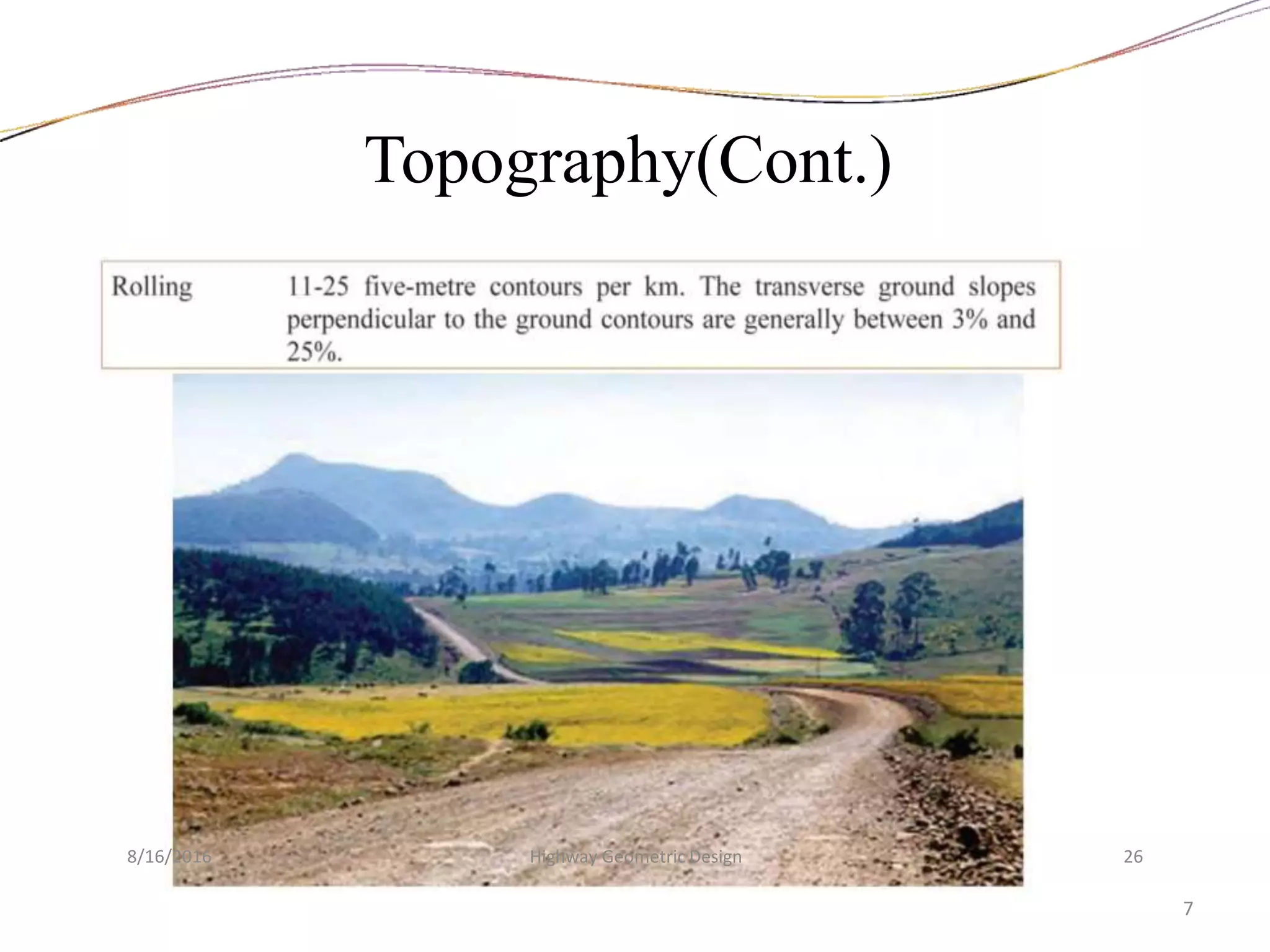
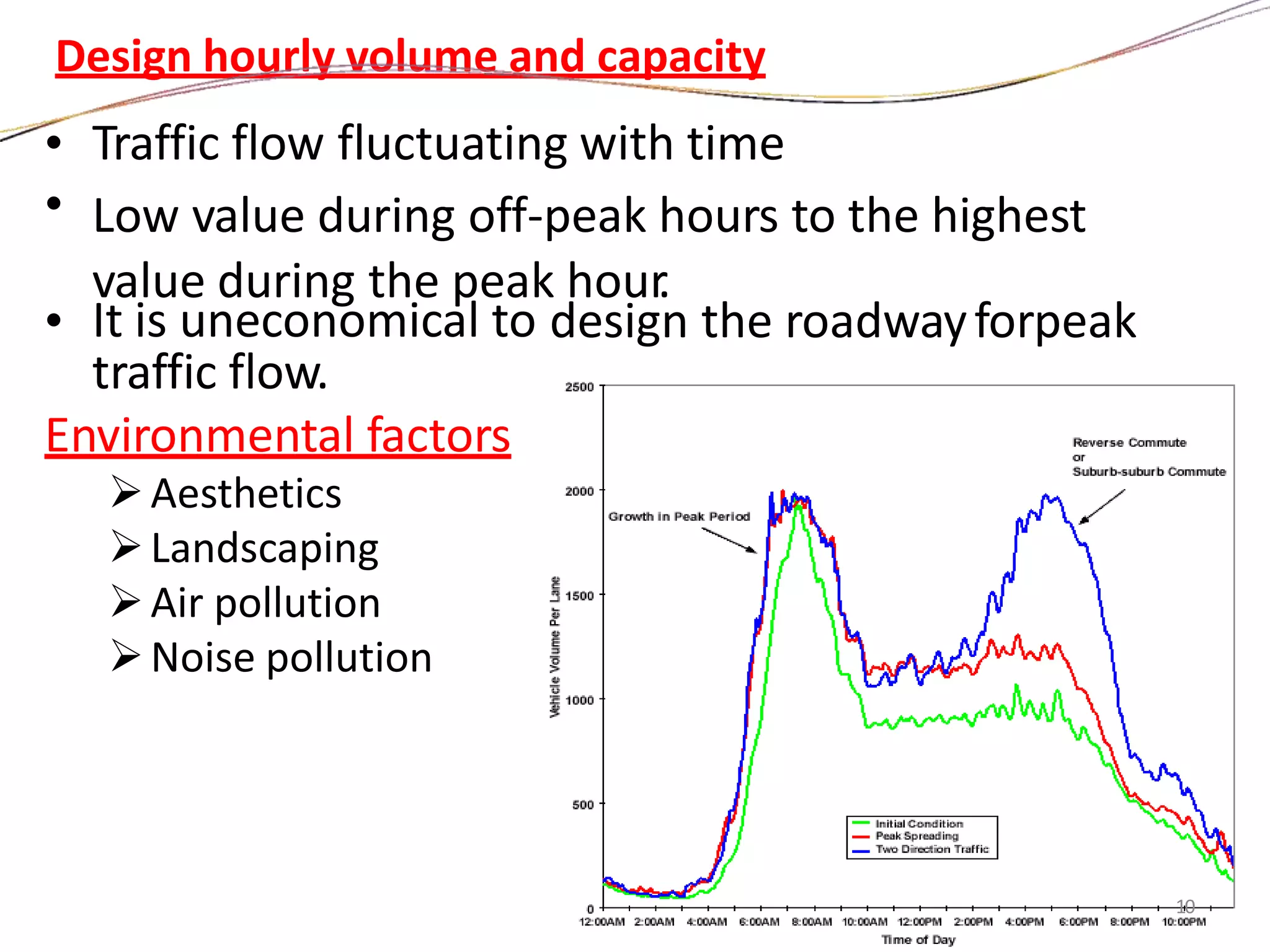
This document discusses the key elements of highway geometric design including cross-section elements, sight distance considerations, horizontal and vertical alignment details, and intersection elements. It covers factors that affect highway geometric design such as design speed, topography, traffic, capacity, and environmental factors. It provides details on cross-section components, sight distance requirements, horizontal and vertical curves, and overtaking sight distance calculations. The objective of highway geometric design is to provide efficient traffic operation with maximum safety at reasonable cost.























































































