The document outlines the geometric design of highways, focusing on dimensions, alignments, sight distances, and safety standards required for efficient traffic operation. Key factors influencing the design include design speed, terrain, traffic characteristics, and environmental considerations, with detailed elements such as cross sections, camber, and superelevation discussed. Various road features such as carriageways, shoulders, sidewalks, and medians are described along with their functions in enhancing road safety and traffic management.
![12/27/2024
9
Functions:
• To separate different lanes of road.
• To strengthen and protect pavement edge. To facilitate and control drainage
• To provide good aesthetic appearance.
3.2.1 Rural Roads
District road/ core network(in hill)
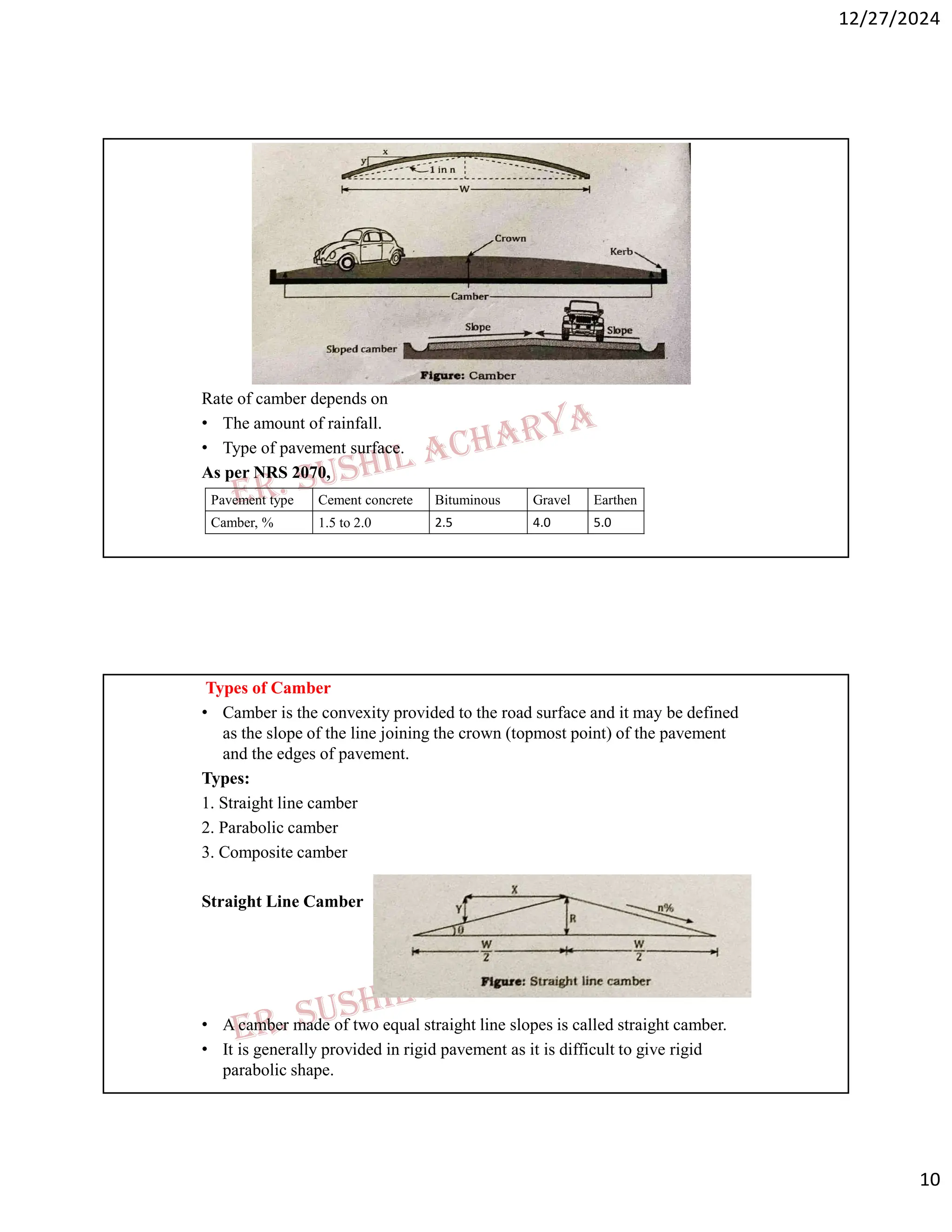
3.2.2Camber or Cross Slope or Cross Fall
• A Camber is the cross slope provided to raise middle of the road surface in
the transverse direction to drain off rain water from road surface. It is
expressed as % or 1 in N
Objectives of Camber
The main objectives of providing camber for road construction are:
• Surface protection[Mainly for the bituminous or gravel roads].
• Facilitate quick drying of the Pavement. This helps to increase the safety.
• Proper drainage which helps to protect the sub-grade.](https://image.slidesharecdn.com/geo-second-last-250121143039-84a0dceb/75/geo-second-last-pdf-bbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbb-bggggggggggggggggggggggggg-9-2048.jpg)


![12/27/2024
61
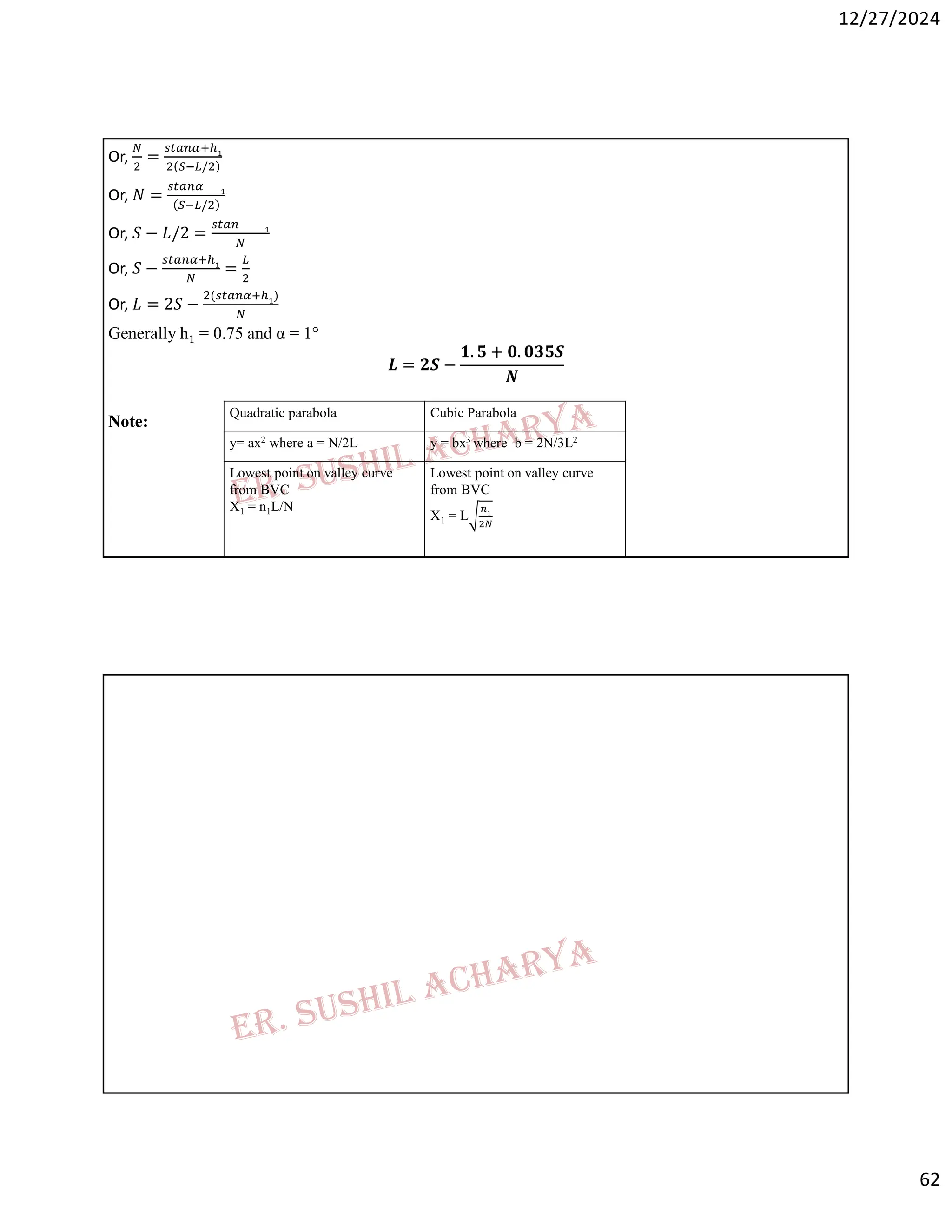
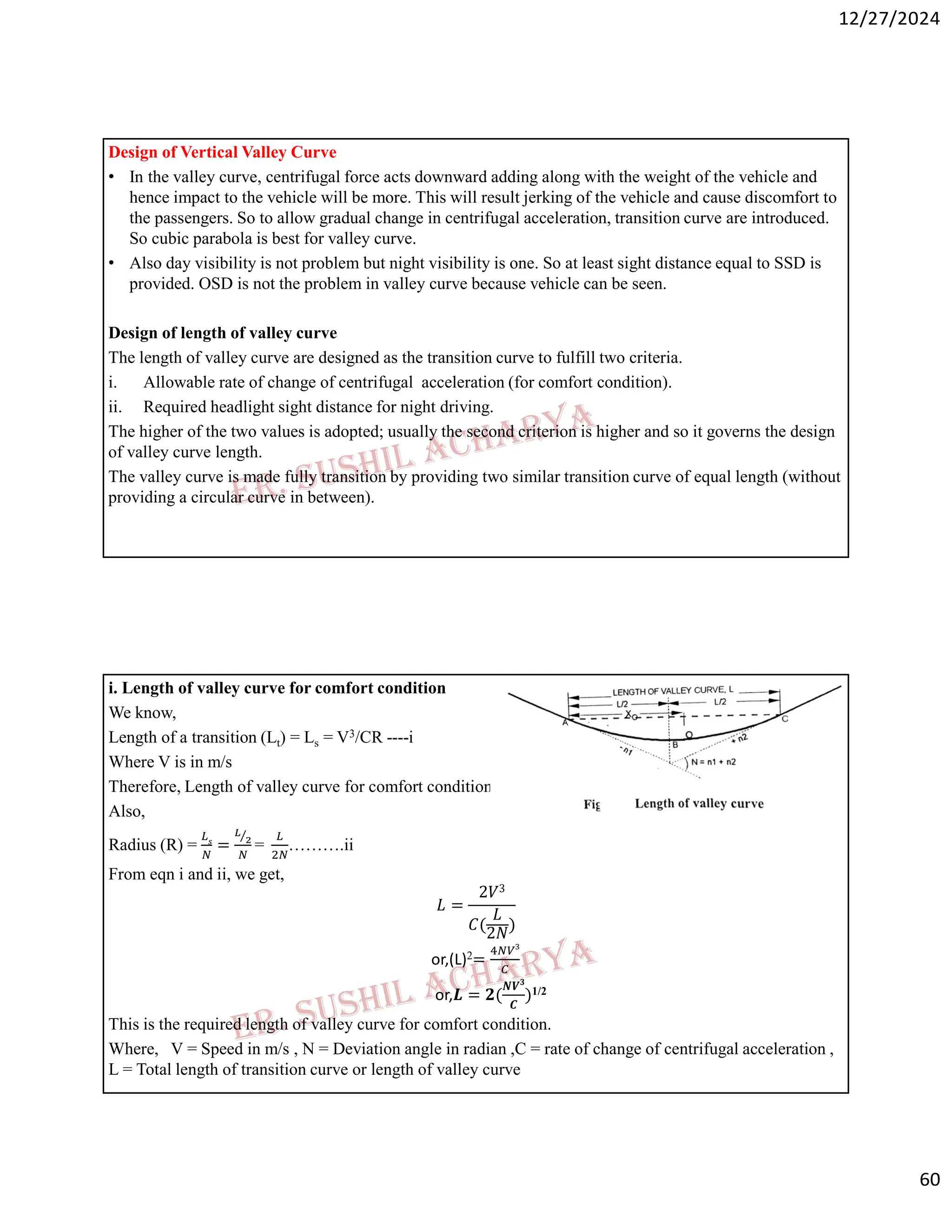
ii. Length of valley curve for headlight sight distance
Case a: When L>SSD
As we know,
Minimum sight distance is available when the vehicle
is at lowest point of valley curve. So length of
valley curve for this case is designed considering the
limiting condition. Considering parabolic vertical curve,
the equation is given as;
Y = ax2
Where a = N/2L
Therefore y = 𝑥2 ………….i
Let L be the length of valley curve h1 be the average height of head light and α be the beam angle, then,
At x = s , y = h1+stanα
So eqn i becomes,
ℎ1 + 𝑠𝑡𝑎𝑛𝛼 =
𝑁
2𝐿
∗ 𝑠2
ℎ1 + 𝑠𝑡𝑎𝑛𝛼
2𝐿
𝑠2
= 𝑁
𝐿 =
𝑁𝑠2
2[ℎ1 + 𝑠𝑡𝑎𝑛𝛼]
This is the equation for length of valley curve. Generally h1 = 0.75m and α = 1°
𝐿 =
𝑁𝑠2
2[0.75 + 𝑠𝑡𝑎𝑛1]
𝐿 =
𝑁𝑠2
2[0.75 + 0.0175]
𝑳 =
𝑵𝒔𝟐
𝟐[𝟏. 𝟓 + 𝟎. 𝟎𝟑𝟓𝟓]
Case b: When L<SSD
In this case the sight distance is minimum when the vehicle is at
the beginning of the valley curve.
In ∆CED
𝑡𝑎𝑛
𝑁
2
=
𝑠𝑡𝑎𝑛𝛼 + ℎ1
2
𝑆 − 𝐿/2
Or, 𝑡𝑎𝑛 =
/
here tan ≈](https://image.slidesharecdn.com/geo-second-last-250121143039-84a0dceb/75/geo-second-last-pdf-bbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbbb-bggggggggggggggggggggggggg-61-2048.jpg)