Downloaded 66 times
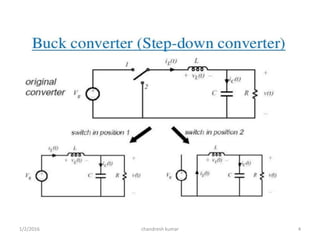
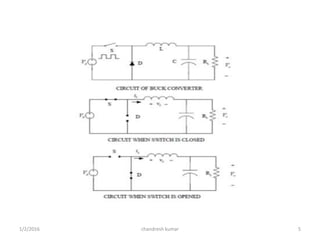
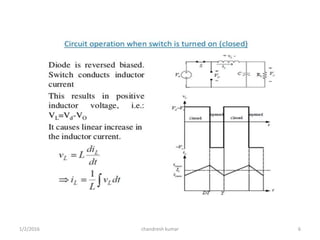
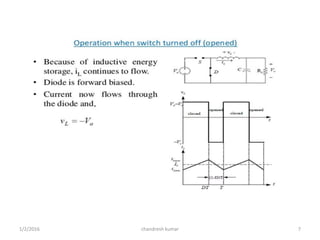

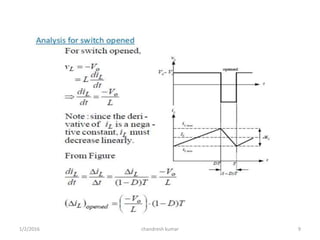
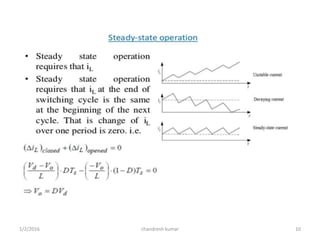
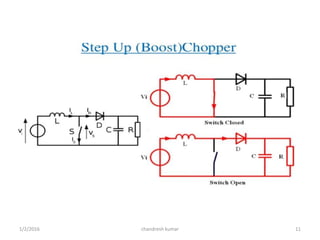
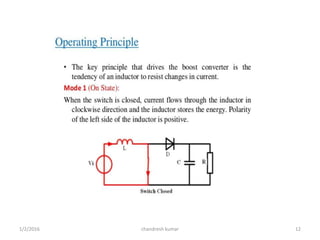
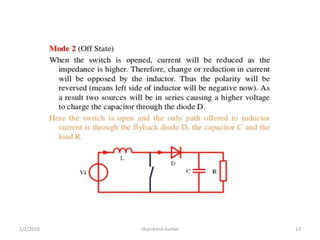

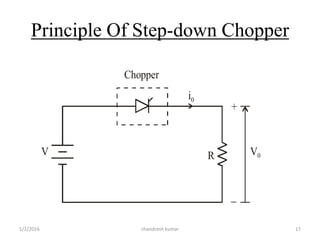

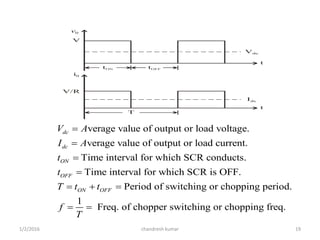
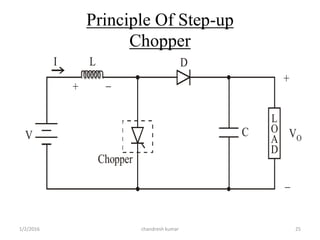
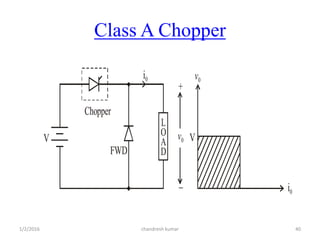
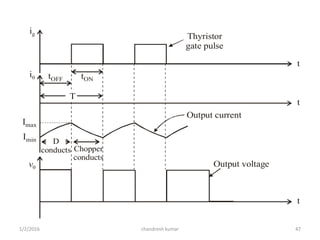
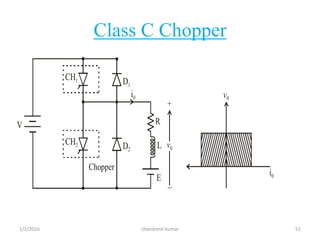
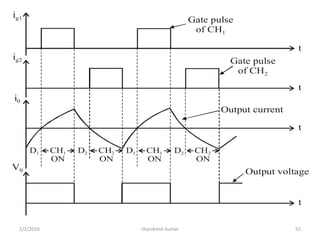
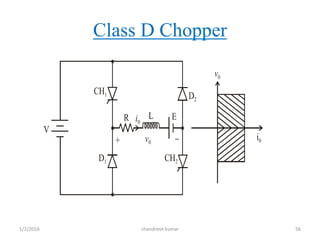
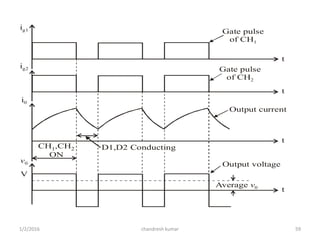
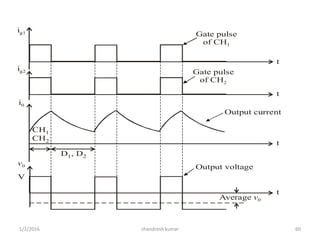
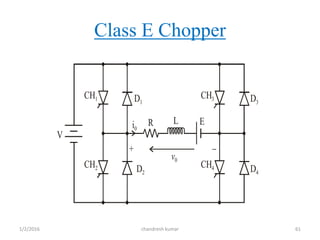
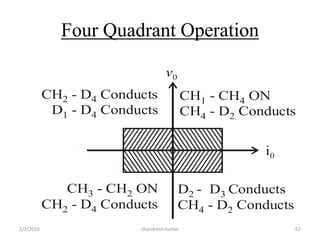

The document discusses different types of DC to DC converters known as choppers. It describes step-down and step-up choppers and how they produce output voltages lower and higher than the input voltage respectively. The principle of operation of step-down choppers involves using a thyristor switch to connect the input voltage across the load intermittently. Step-up choppers use an inductor to store energy when the switch is on and deliver it to the load and capacitor when the switch is off, boosting the voltage. The document also classifies choppers into different classes based on the polarity of output voltage and current.









































































