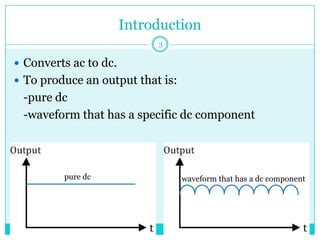
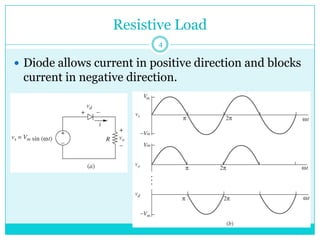
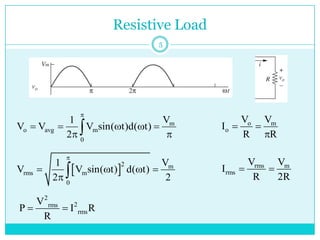
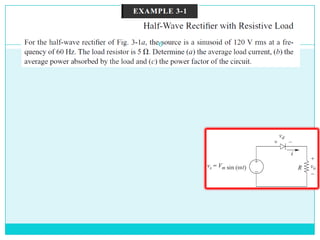
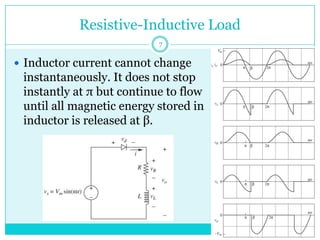
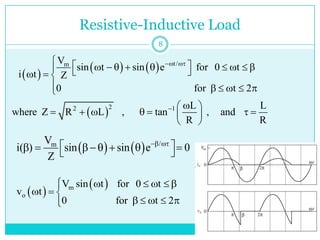
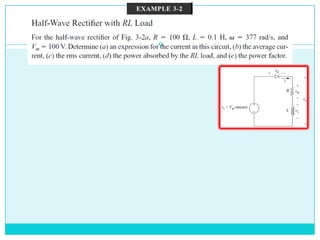
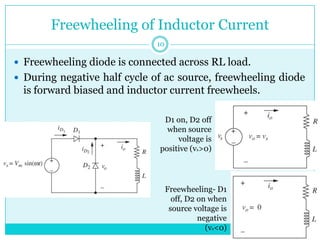
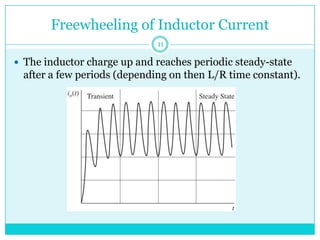
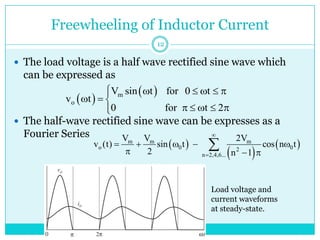
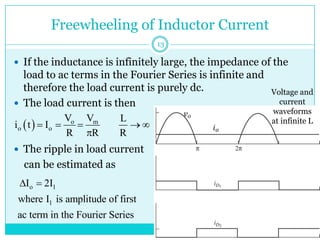
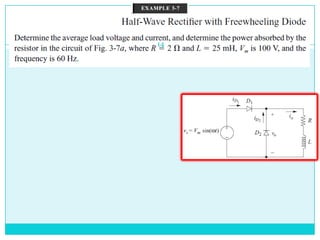
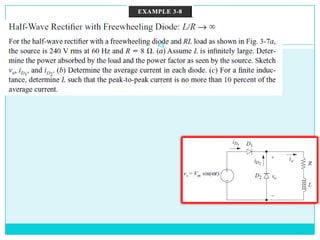
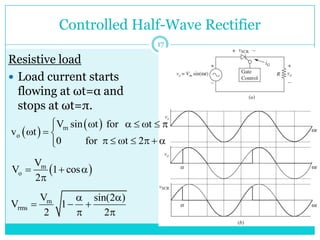
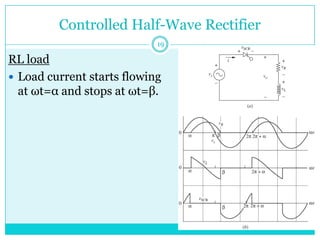
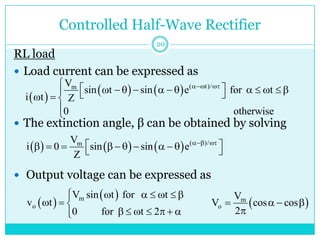
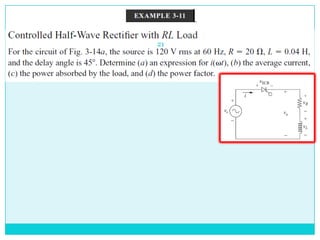
This document discusses half-wave rectifiers. It begins by stating the learning outcomes which include evaluating the performance of various power electronic converters. It then defines half-wave rectifiers as converting AC to DC by only allowing current flow during one half of the AC cycle. The document analyzes half-wave rectifiers with resistive and resistive-inductive loads. It also discusses freewheeling of the inductor current and controlled half-wave rectifiers using thyristors. Equations for various voltages and currents are provided.