Downloaded 46 times
![Silberschatz, Galvin and Gagne ©20024.21
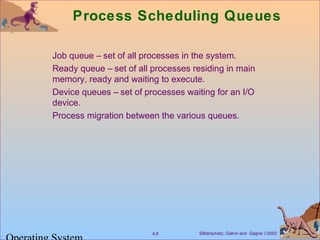
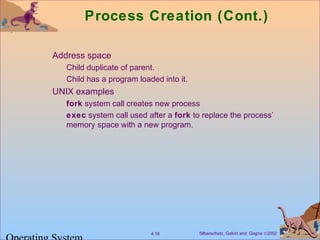
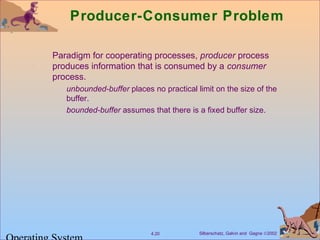
Bounded-Buffer – Shared-Memory Solution
Shared data
#define BUFFER_SIZE 10
Typedef struct {
. . .
} item;
item buffer[BUFFER_SIZE];
int in = 0;
int out = 0;
Solution is correct, but can only use BUFFER_SIZE-1
elements](https://image.slidesharecdn.com/ch4-160202115551/85/Ch4-Processes-OS-21-320.jpg)
![Silberschatz, Galvin and Gagne ©20024.22
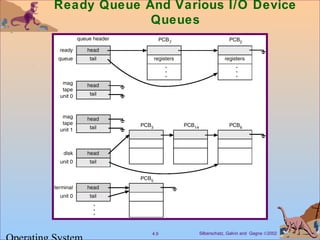
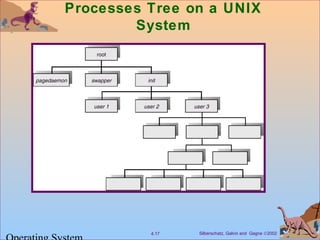
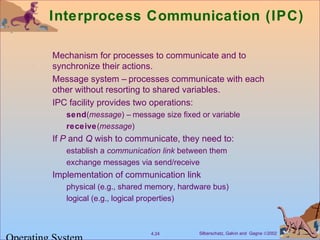
Bounded-Buffer – Producer
Process
item nextProduced;
while (1) {
while (((in + 1) % BUFFER_SIZE) == out)
; /* do nothing */
buffer[in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/ch4-160202115551/85/Ch4-Processes-OS-22-320.jpg)
![Silberschatz, Galvin and Gagne ©20024.23
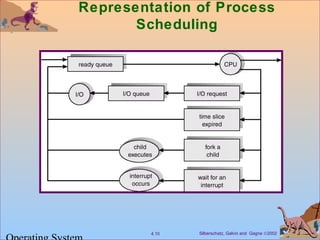
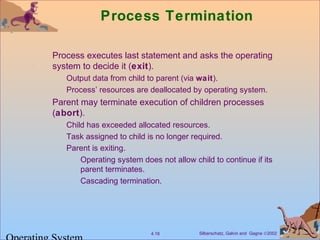
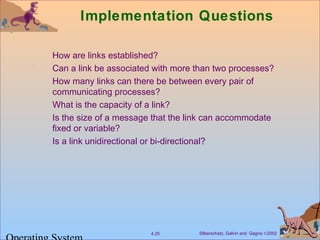
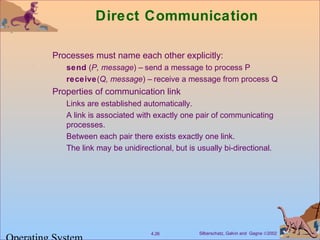
Bounded-Buffer – Consumer
Process
item nextConsumed;
while (1) {
while (in == out)
; /* do nothing */
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/ch4-160202115551/85/Ch4-Processes-OS-23-320.jpg)

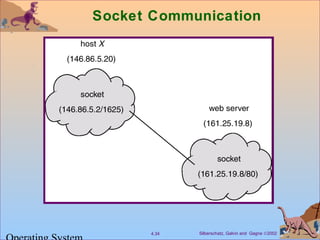
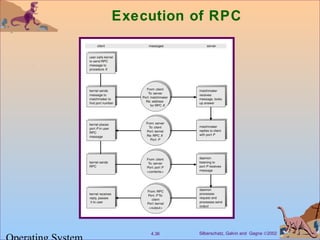
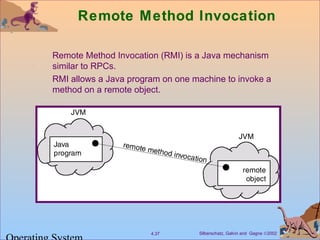
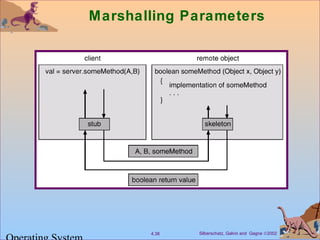

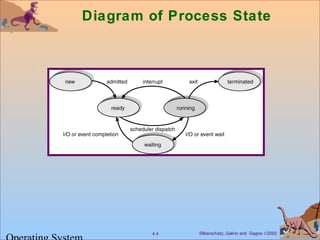
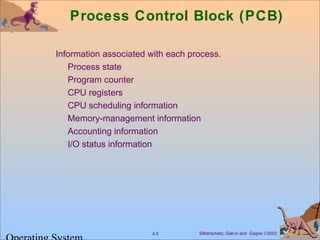
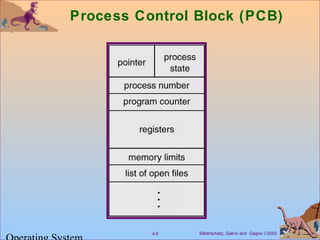
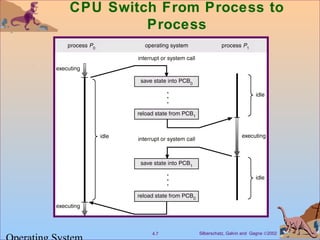
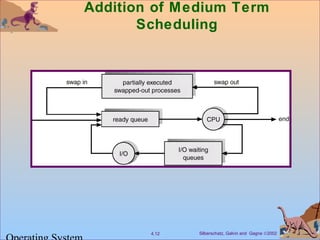
The document covers the concepts of processes and process scheduling in operating systems, explaining the various states a process can occupy and the role of the process control block (PCB). It details different types of schedulers, process creation and termination, and the significance of cooperating processes along with interprocess communication mechanisms. Additionally, it discusses client-server communication, including sockets and remote procedure calls (RPC), emphasizing how processes interact both locally and over a network.