Downloaded 869 times


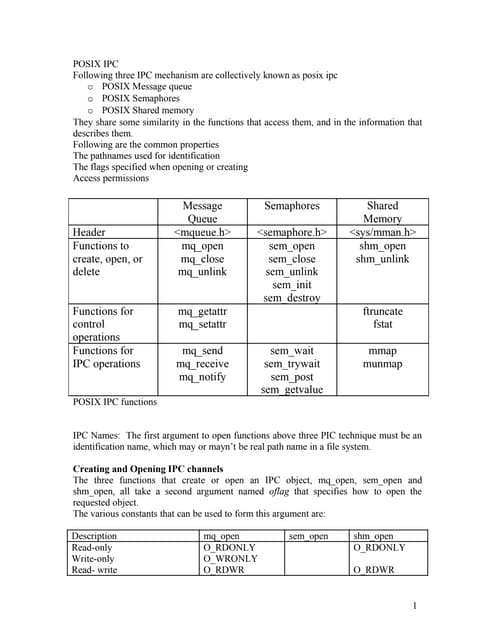
There are several mechanisms for inter-process communication (IPC) in UNIX systems, including message queues, shared memory, and semaphores. Message queues allow processes to exchange data by placing messages into a queue that can be accessed by other processes. Shared memory allows processes to communicate by declaring a section of memory that can be accessed simultaneously. Semaphores are used to synchronize processes so they do not access critical sections at the same time.