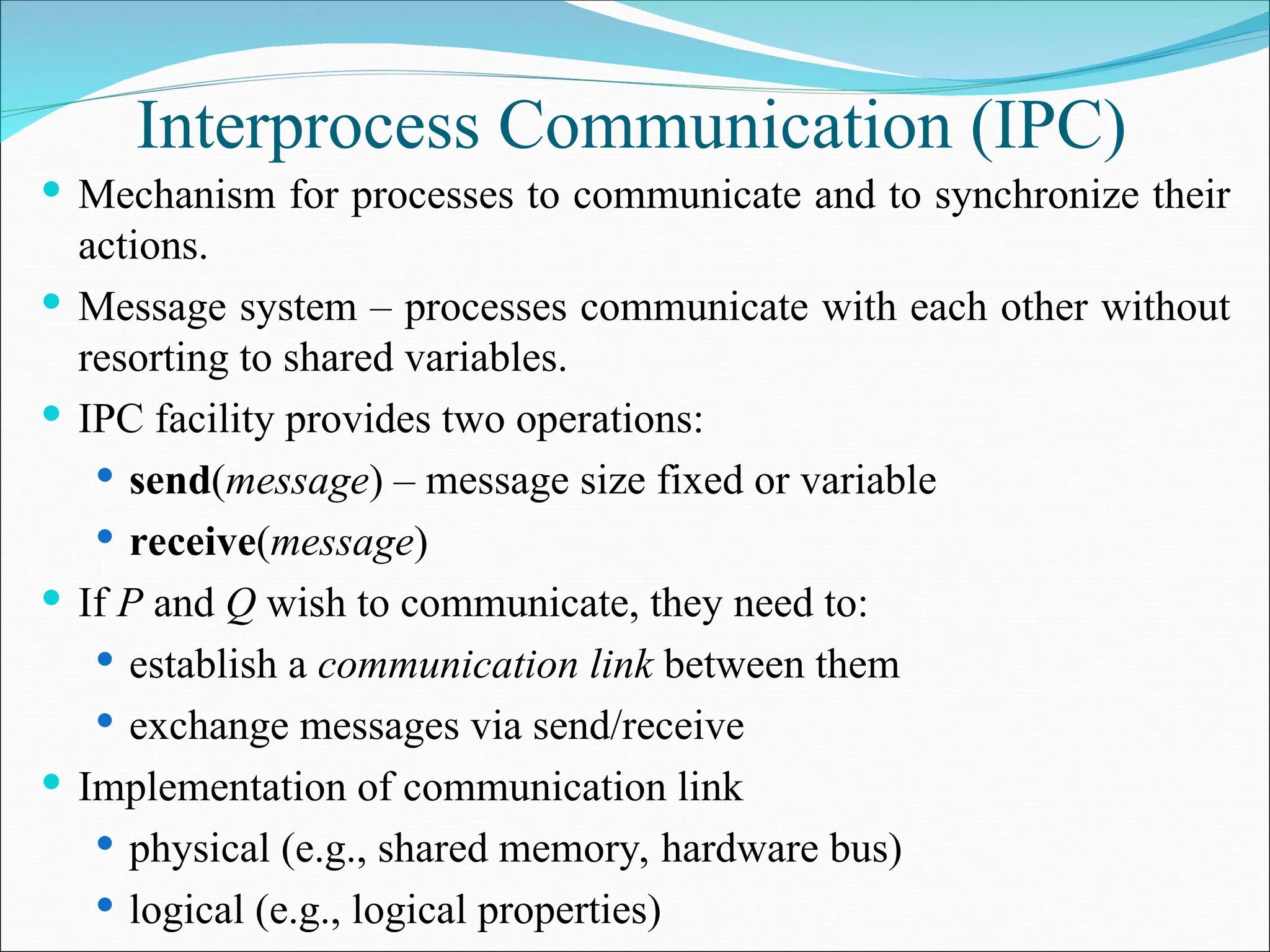
The document outlines key concepts and structures related to process management in operating systems, including process states, process control blocks, and scheduling. It describes interprocess communication mechanisms and the producer-consumer problem, highlighting the differences between cooperating and independent processes. Additionally, it discusses the client-server model and various communication methods such as message passing and socket communication.
![Bounded-Buffer – Shared-Memory Solution
Shared data
#define BUFFER_SIZE 10
Typedef struct {
. . .
} item;
item buffer[BUFFER_SIZE];
int in = 0;
int out = 0;
Solution is correct, but can only use
BUFFER_SIZE-1 elements](https://image.slidesharecdn.com/unitiprocessmanagement-250208130958-19c1fc7a/75/UNIT-I-Process-management-main-concept-ppt-21-2048.jpg)
![Bounded-Buffer – Producer Process
item nextProduced;
while (1) {
while (((in + 1) % BUFFER_SIZE) == out)
; /* do nothing */
buffer[in] = nextProduced;
in = (in + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/unitiprocessmanagement-250208130958-19c1fc7a/75/UNIT-I-Process-management-main-concept-ppt-22-2048.jpg)
![Bounded-Buffer – Consumer Process
item nextConsumed;
while (1) {
while (in == out)
; /* do nothing */
nextConsumed = buffer[out];
out = (out + 1) % BUFFER_SIZE;
}](https://image.slidesharecdn.com/unitiprocessmanagement-250208130958-19c1fc7a/75/UNIT-I-Process-management-main-concept-ppt-23-2048.jpg)