Downloaded 30 times
![Theorem 3.3.2 (Abel’s Theorem)
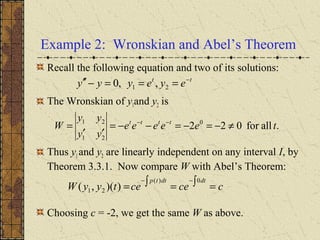
Suppose y1and y2 are solutions to the equation
where p and q are continuous on some open interval I. Then
W(y1,y2)(t) is given by
where c is a constant that depends on y1 and y2 but not on t.
Note that W(y1,y2)(t) is either zero for all t in I (if c = 0) or
else is never zero in I (if c ≠ 0).
0)()(][ =+′+′′= ytqytpyyL
∫=
− dttp
cetyyW
)(
21 ))(,(](https://image.slidesharecdn.com/ch033-150731094615-lva1-app6891/85/Ch03-3-6-320.jpg)
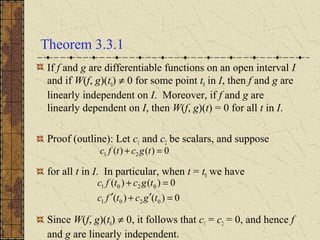
![Theorem 3.3.3
Suppose y1 and y2 are solutions to equation below, whose
coefficients p and q are continuous on some open interval I:
Then y1and y2 are linearly dependent on I iff W(y1, y2)(t) = 0
for all t in I. Also, y1 and y2 are linearly independent on I iff
W(y1, y2)(t) ≠ 0 for all t in I.
0)()(][ =+′+′′= ytqytpyyL](https://image.slidesharecdn.com/ch033-150731094615-lva1-app6891/85/Ch03-3-8-320.jpg)
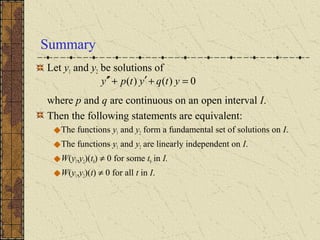

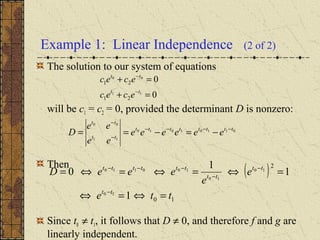
The Wronskian of two functions y1 and y2, denoted W(y1,y2), determines whether y1 and y2 are linearly independent solutions to a differential equation. If W(y1,y2) is nonzero at some point in the interval, then y1 and y2 are linearly independent over that entire interval. Additionally, y1 and y2 are linearly dependent over an interval if and only if W(y1,y2) is zero for all points in that interval. The Wronskian also determines whether y1 and y2 form a fundamental set of solutions.



































































