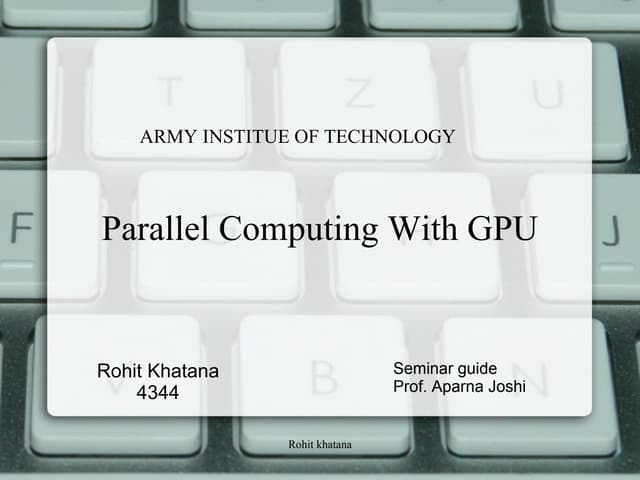



















![A CUDA kernel is executed by an array of threads All threads run the same code (SPMD) Each thread has an ID that it uses to compute memory addresses and make control decisions 7 6 5 4 3 2 1 0 … float x = input[threadID]; float y = func(x); output[threadID] = y; … threadID](https://image.slidesharecdn.com/cfakepathcuda-100513101416-phpapp01/85/Introduction-to-parallel-computing-using-CUDA-23-320.jpg)
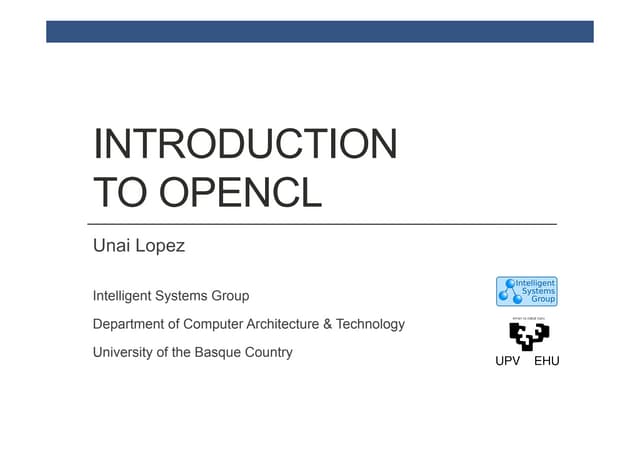
![Divide monolithic thread array into multiple blocks Threads within a block cooperate via shared memory, atomic operations and barrier synchronization Threads in different blocks cannot cooperate Thread Block 0 … Thread Block 1 Thread Block N - 1 … float x = input[threadID]; float y = func(x); output[threadID] = y; … threadID … float x = input[threadID]; float y = func(x); output[threadID] = y; … … float x = input[threadID]; float y = func(x); output[threadID] = y; … 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0 7 6 5 4 3 2 1 0](https://image.slidesharecdn.com/cfakepathcuda-100513101416-phpapp01/85/Introduction-to-parallel-computing-using-CUDA-24-320.jpg)






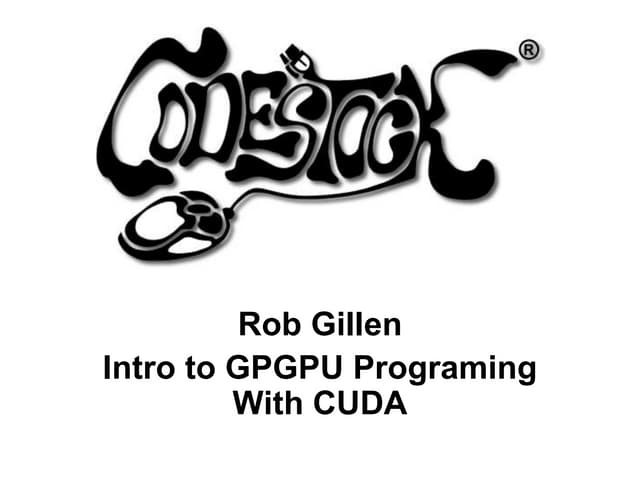
![P = M * N of size WIDTH x WIDTH Without tiling: One thread calculates one element of P M and N are loaded WIDTH times from global memory __global__ void MatrixMulKernel(float* Md, float* Nd, float* Pd, int Width) { // Pvalue is used to store the element of the matrix // that is computed by the thread float Pvalue = 0; for (int k = 0; k < Width; ++k) { float Melement = Md[threadIdx.y*Width+k]; float Nelement = Nd[k*Width+threadIdx.x]; Pvalue += Melement * Nelement; } Pd[threadIdx.y*Width+threadIdx.x] = Pvalue; } M N P WIDTH WIDTH WIDTH WIDTH i k k j // Matrix multiplication on the (CPU) host in double precision void MatrixMulOnHost(float* M, float* N, float* P, int Width) { for (int i = 0; i < Width; ++i) for (int j = 0; j < Width; ++j) { double sum = 0; for (int k = 0; k < Width; ++k) { double a = M[i * width + k]; double b = N[k * width + j]; sum += a * b; } P[i * Width + j] = sum; } }](https://image.slidesharecdn.com/cfakepathcuda-100513101416-phpapp01/85/Introduction-to-parallel-computing-using-CUDA-31-320.jpg)















The document provides an overview of supercomputers and their performance, focusing on massively parallel processing and the CUDA programming model. It discusses the architecture of CUDA processors, memory models, and programming tools, alongside examples and case studies of applications across various research fields. Additionally, it highlights the differences between CPUs and GPUs, emphasizing GPU capabilities for high-performance computation and the future potential of GPU parallel programming.