Downloaded 33 times




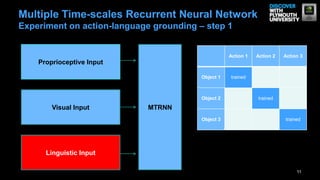
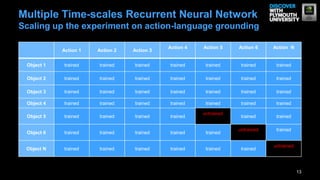
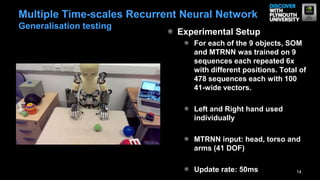

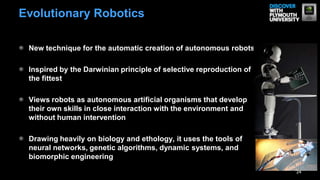

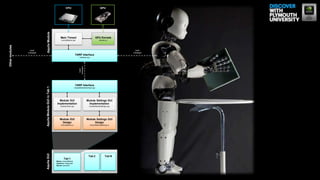
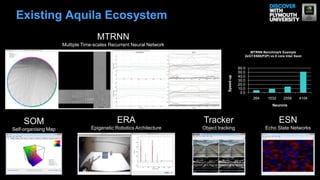

This document discusses the advancements in action and language acquisition in humanoid robots, focusing on biologically-inspired active vision systems and their development through GPU computing. It highlights experiments with recurrent neural networks for action-language grounding, the use of evolutionary robotics, and a method for real-world object recognition training. The findings emphasize the superior adaptability and effectiveness of active vision systems modeled after biological vision compared to traditional computer vision techniques.








































![[251] implementing deep learning using cu dnn](https://cdn.slidesharecdn.com/ss_thumbnails/215implementingdeeplearningusingcudnn-150915052020-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)