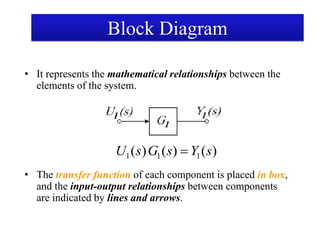
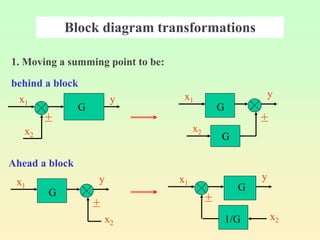
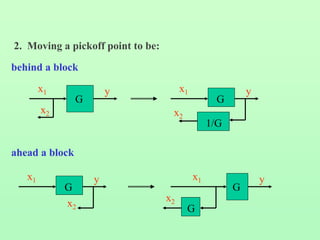
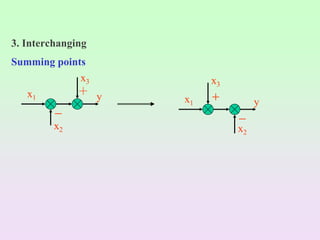
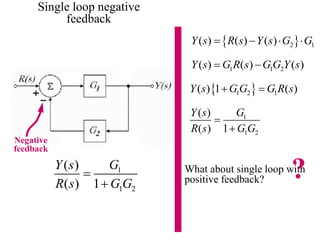
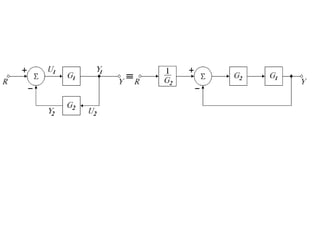
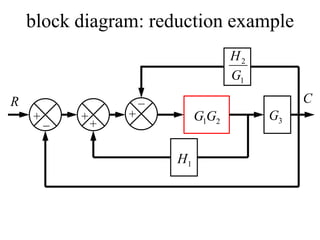
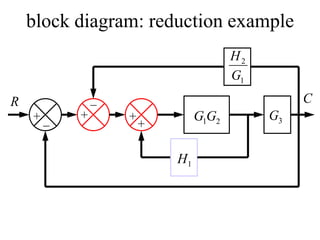
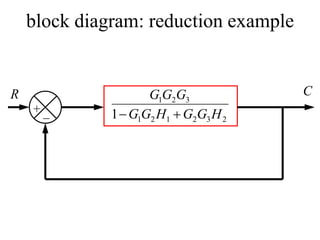
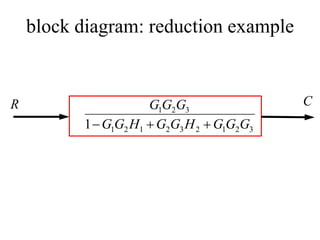
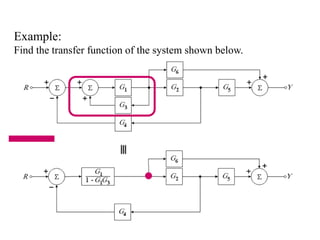
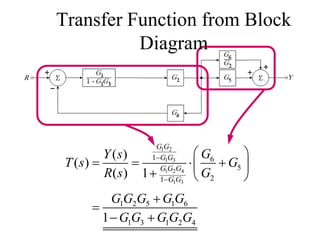
Block diagrams can be used to model systems and visualize mathematical relationships between components. They represent transfer functions of each component in boxes, with input-output connections shown by lines and arrows. Basic block diagram forms include cascade, parallel, and feedback configurations. Block diagrams can be simplified through algebraic transformations like moving summing or pickoff points. This allows determining the overall transfer function of a system from its block diagram representation.