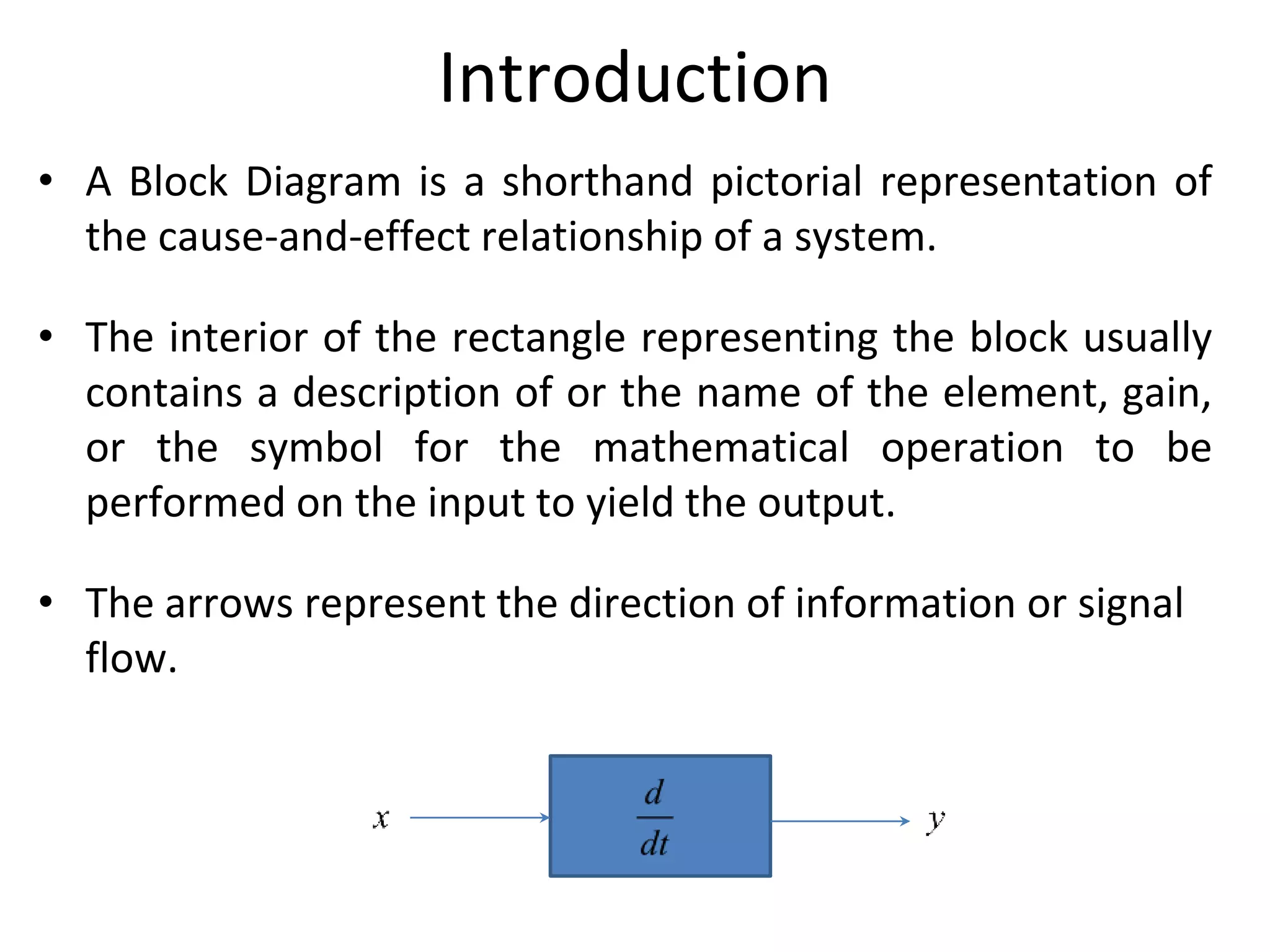
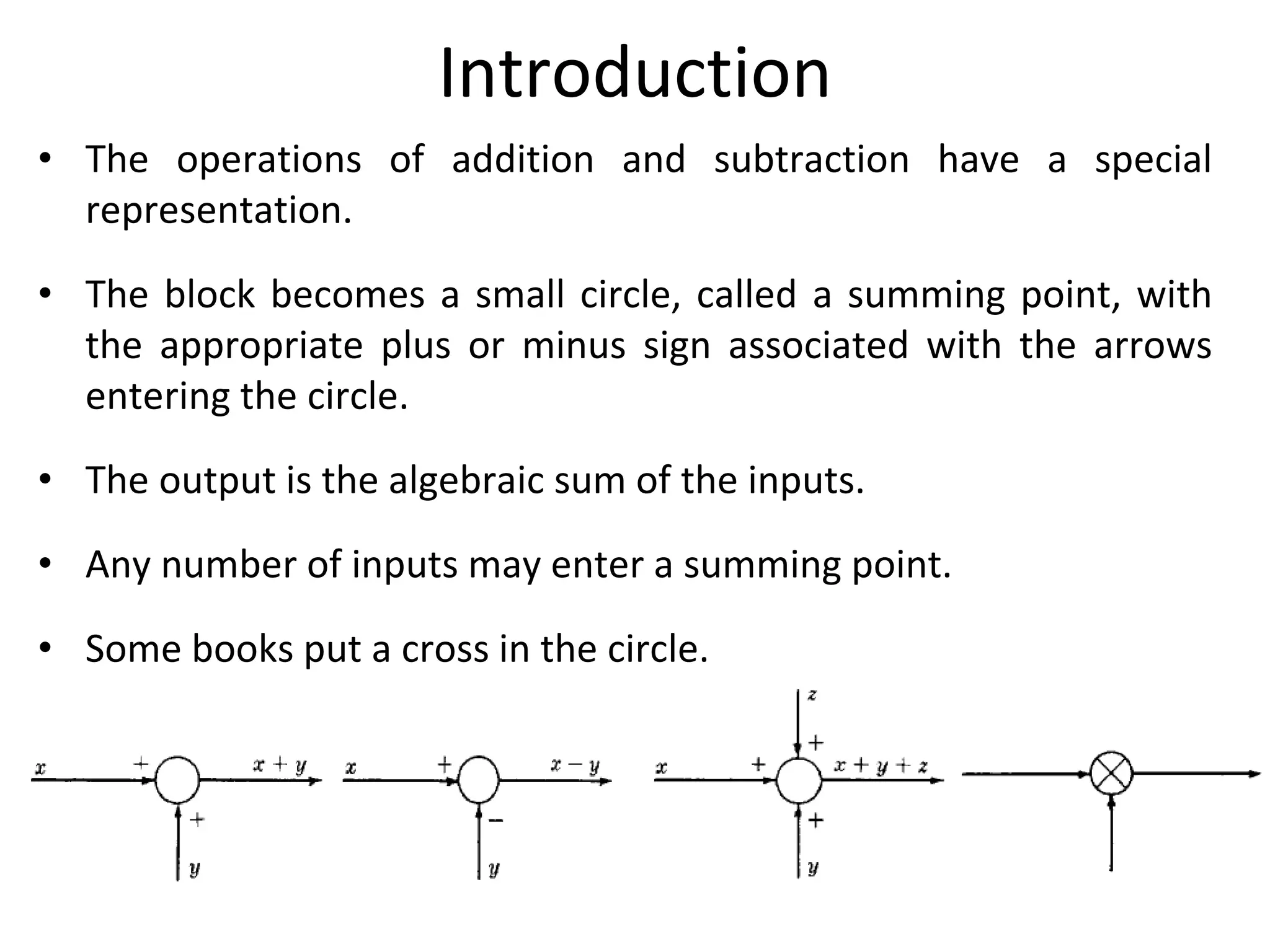
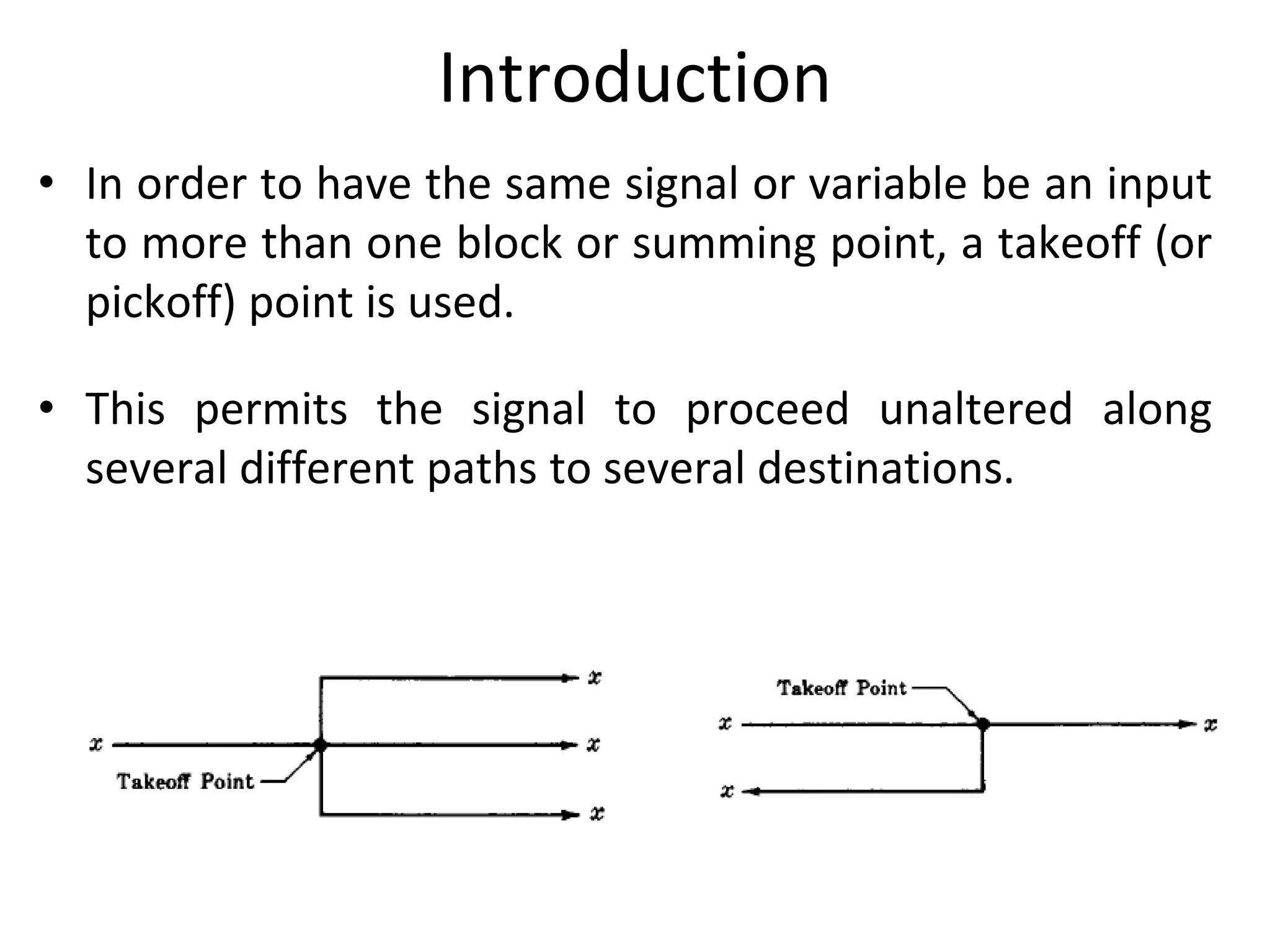
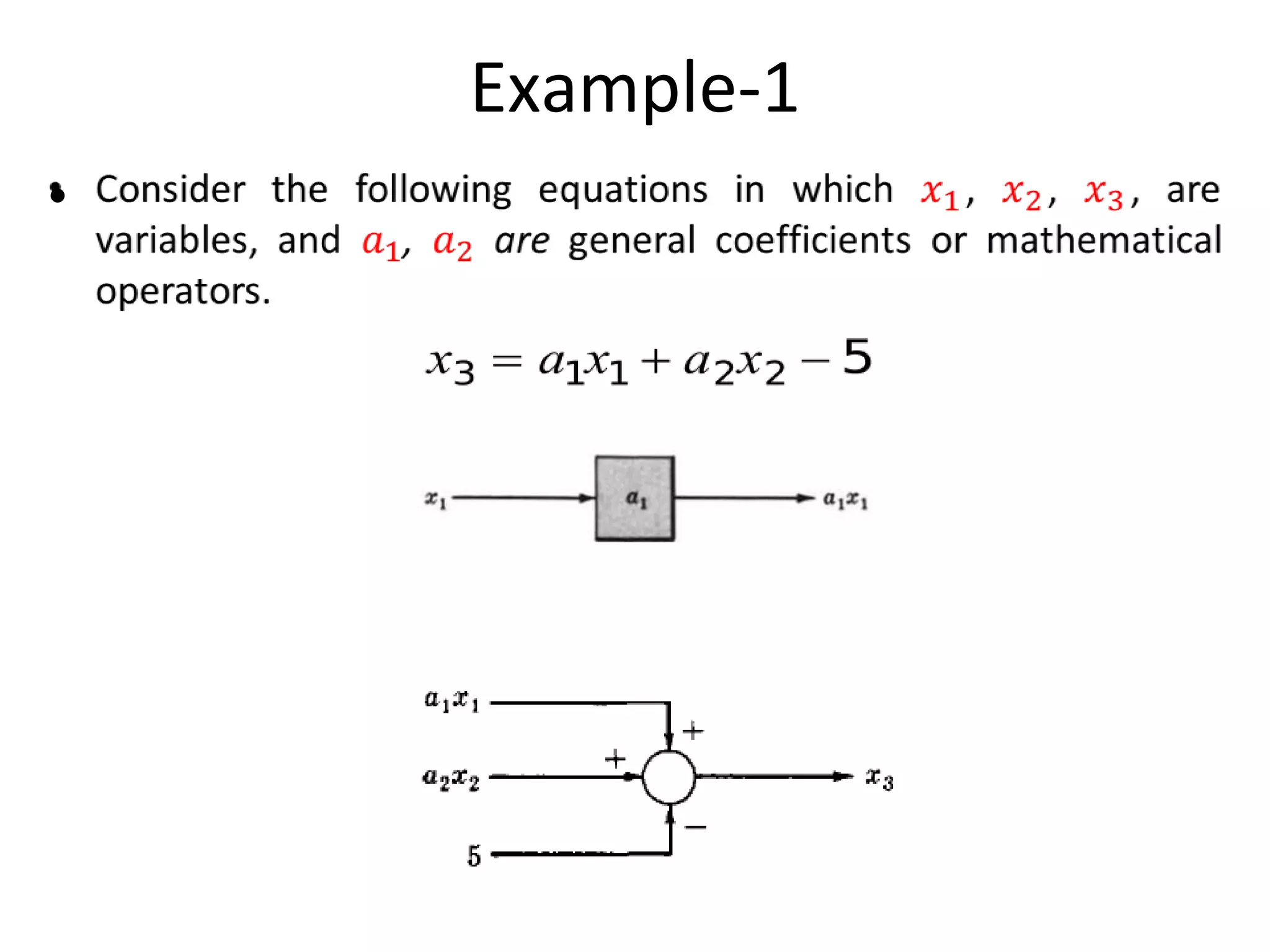
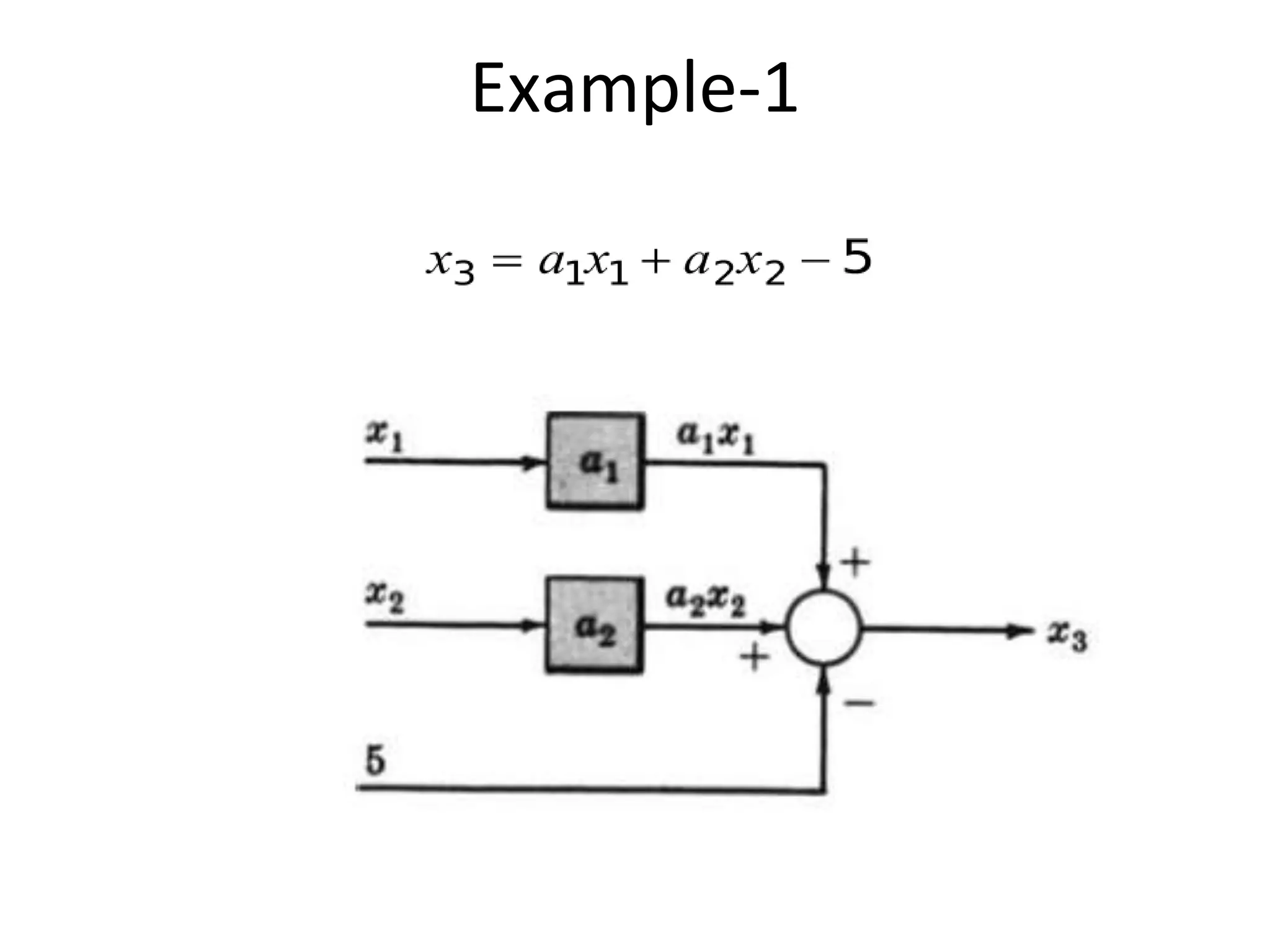
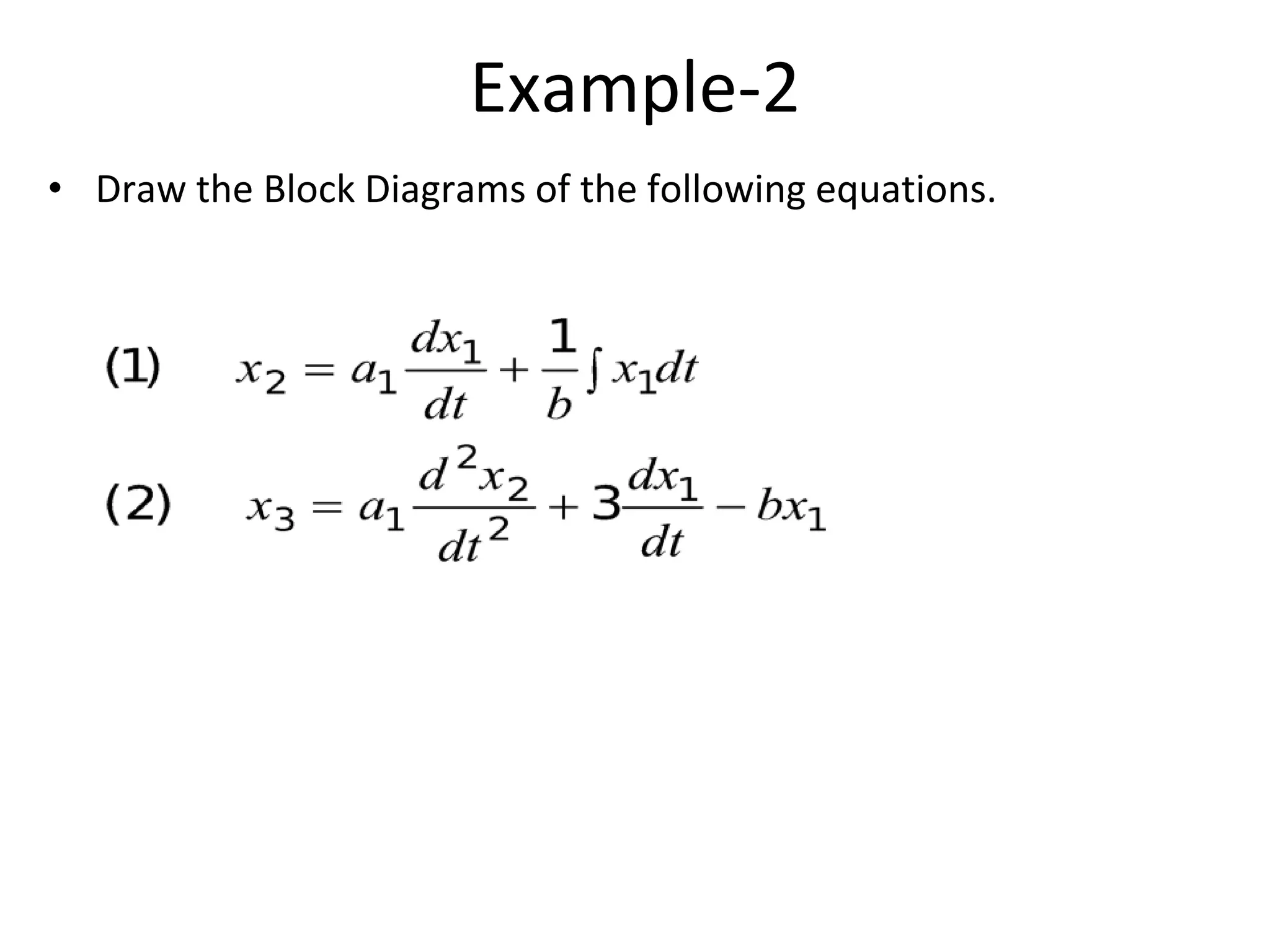
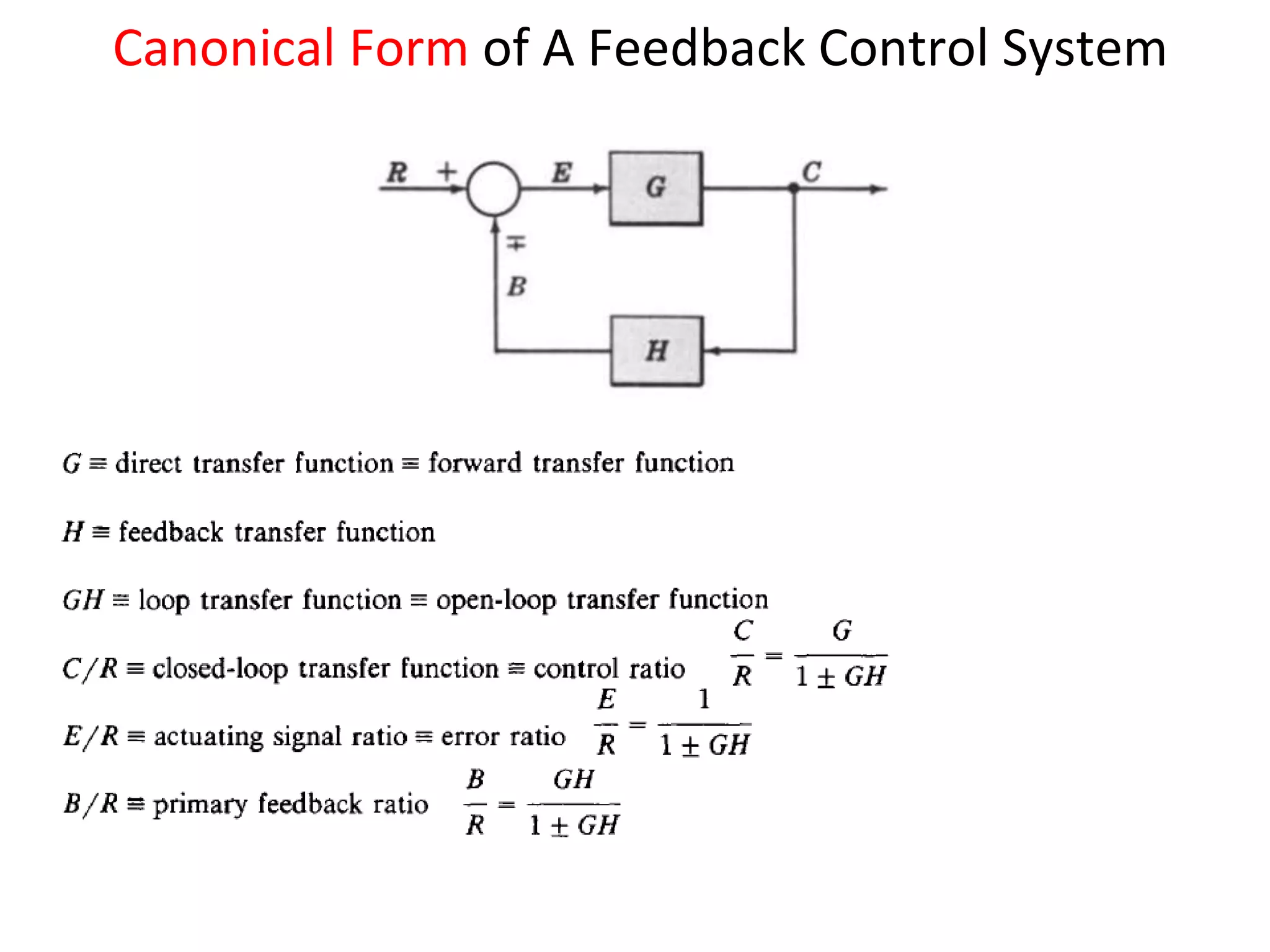
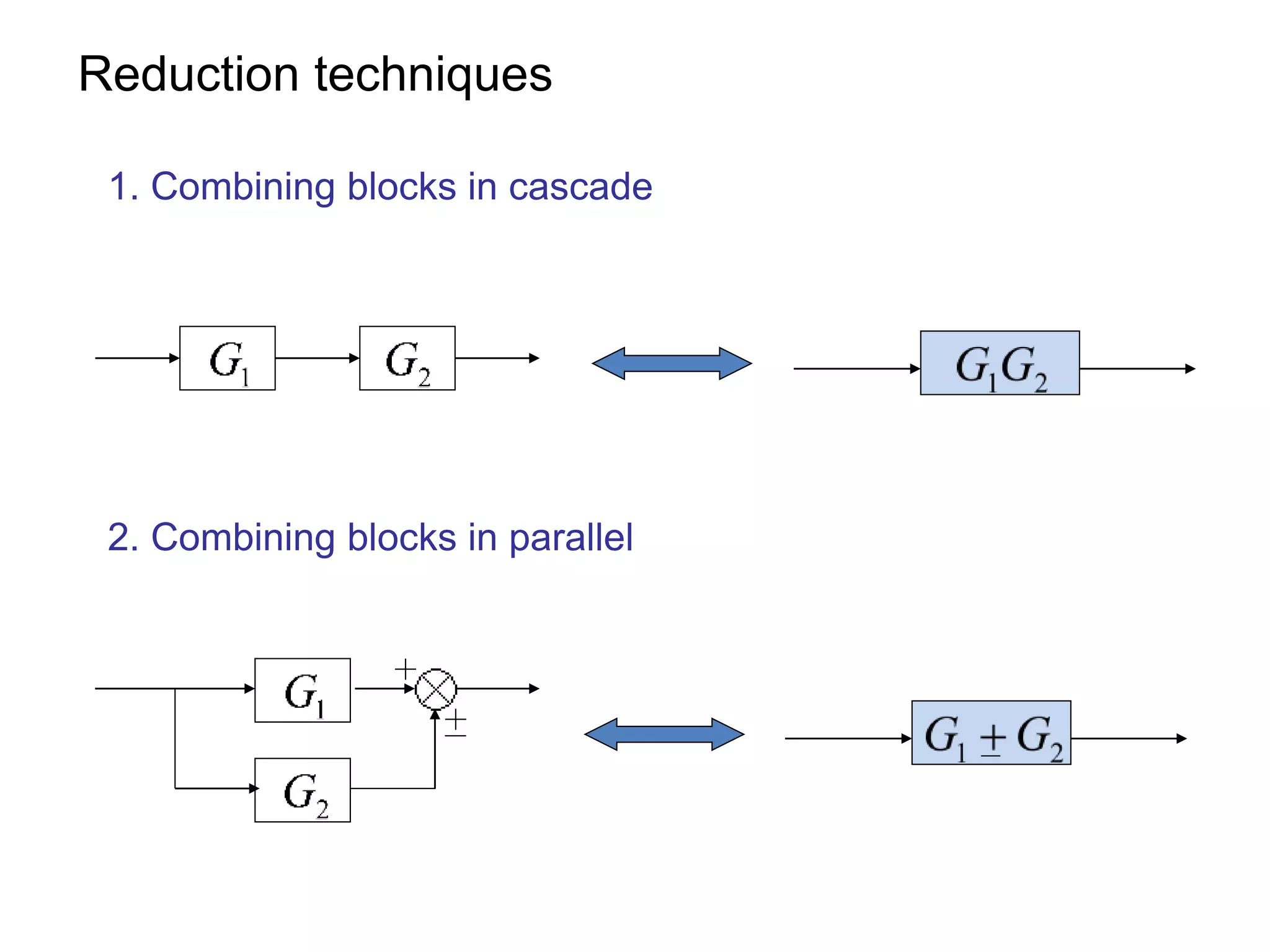
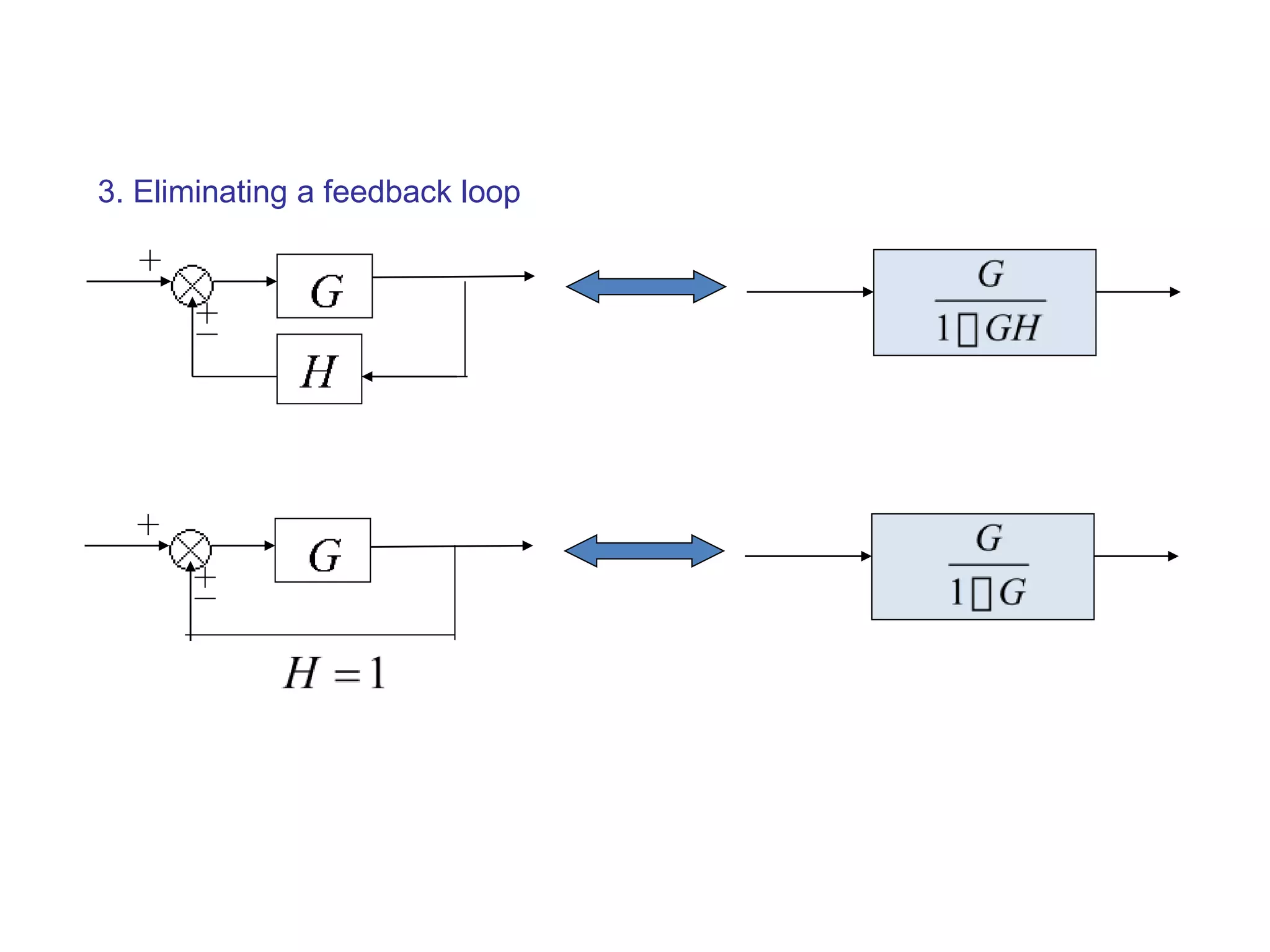
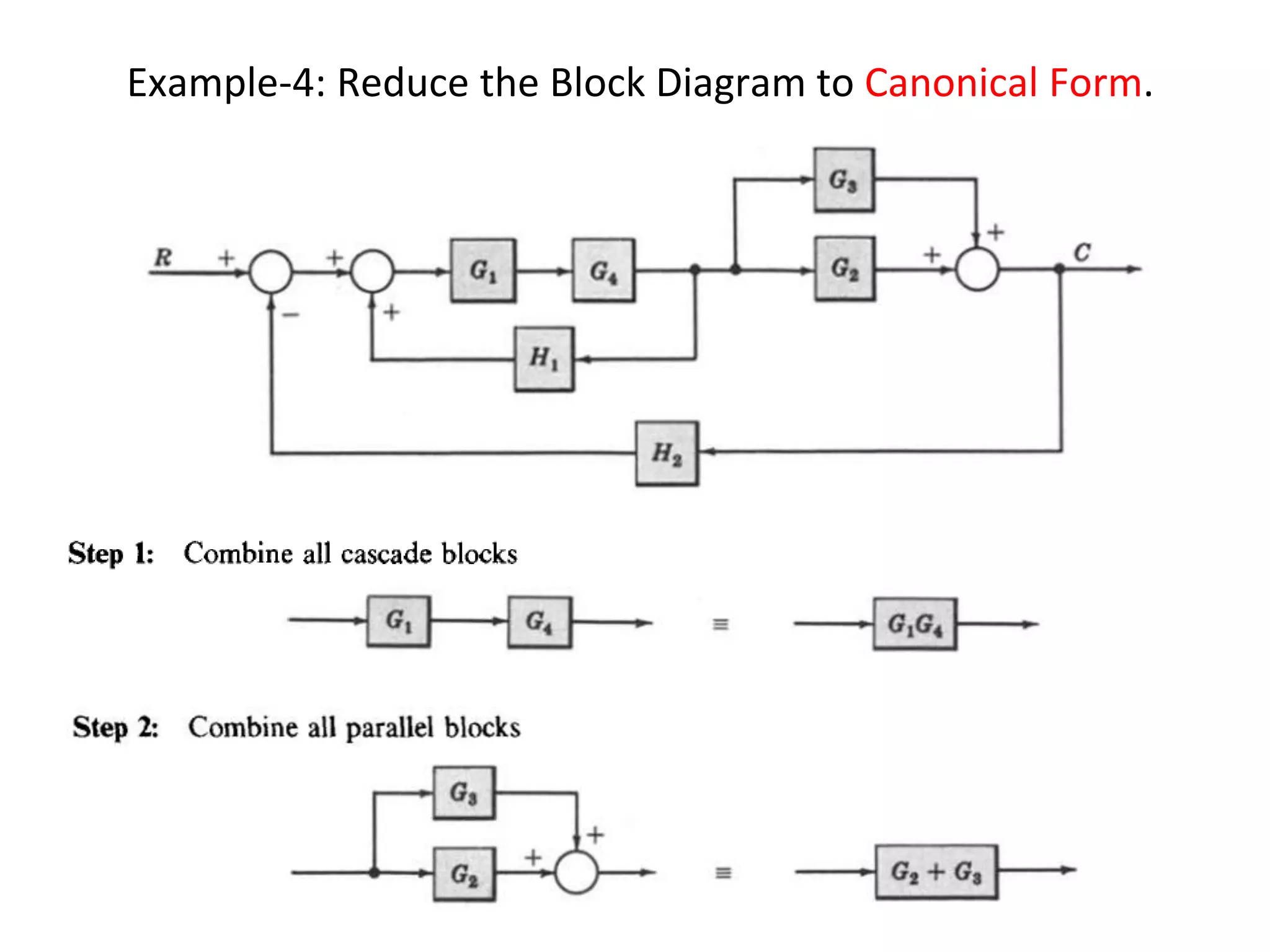
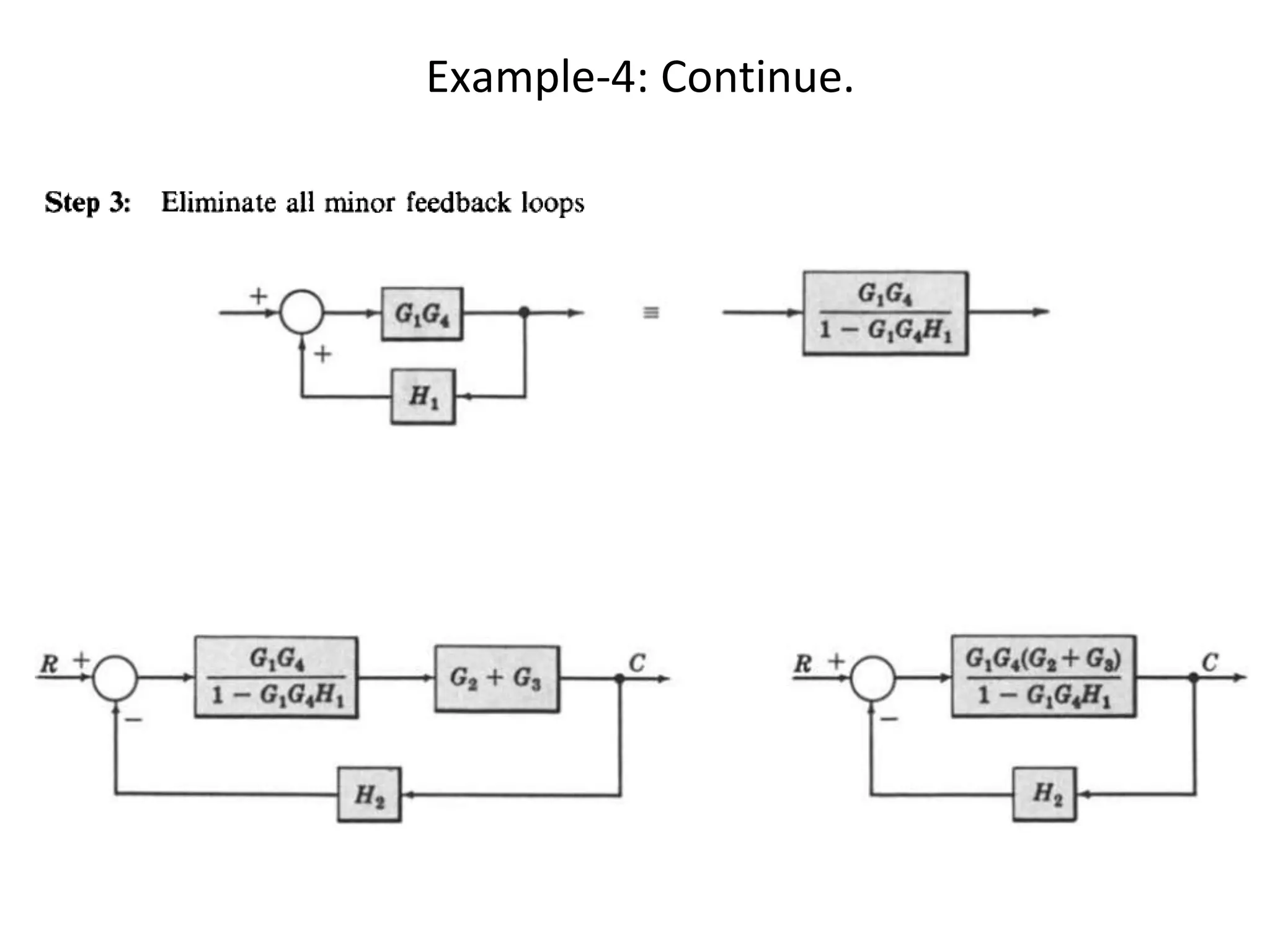
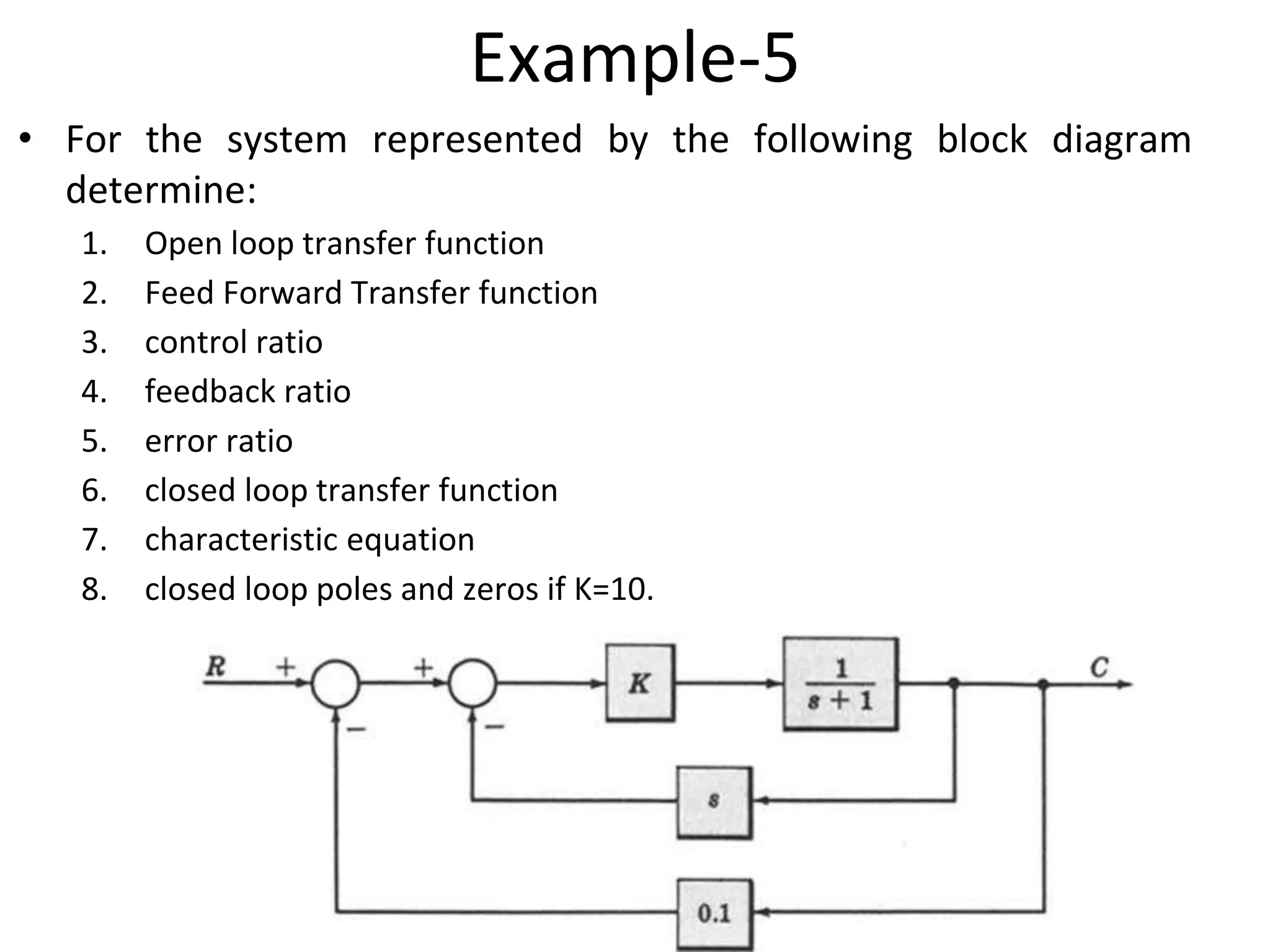
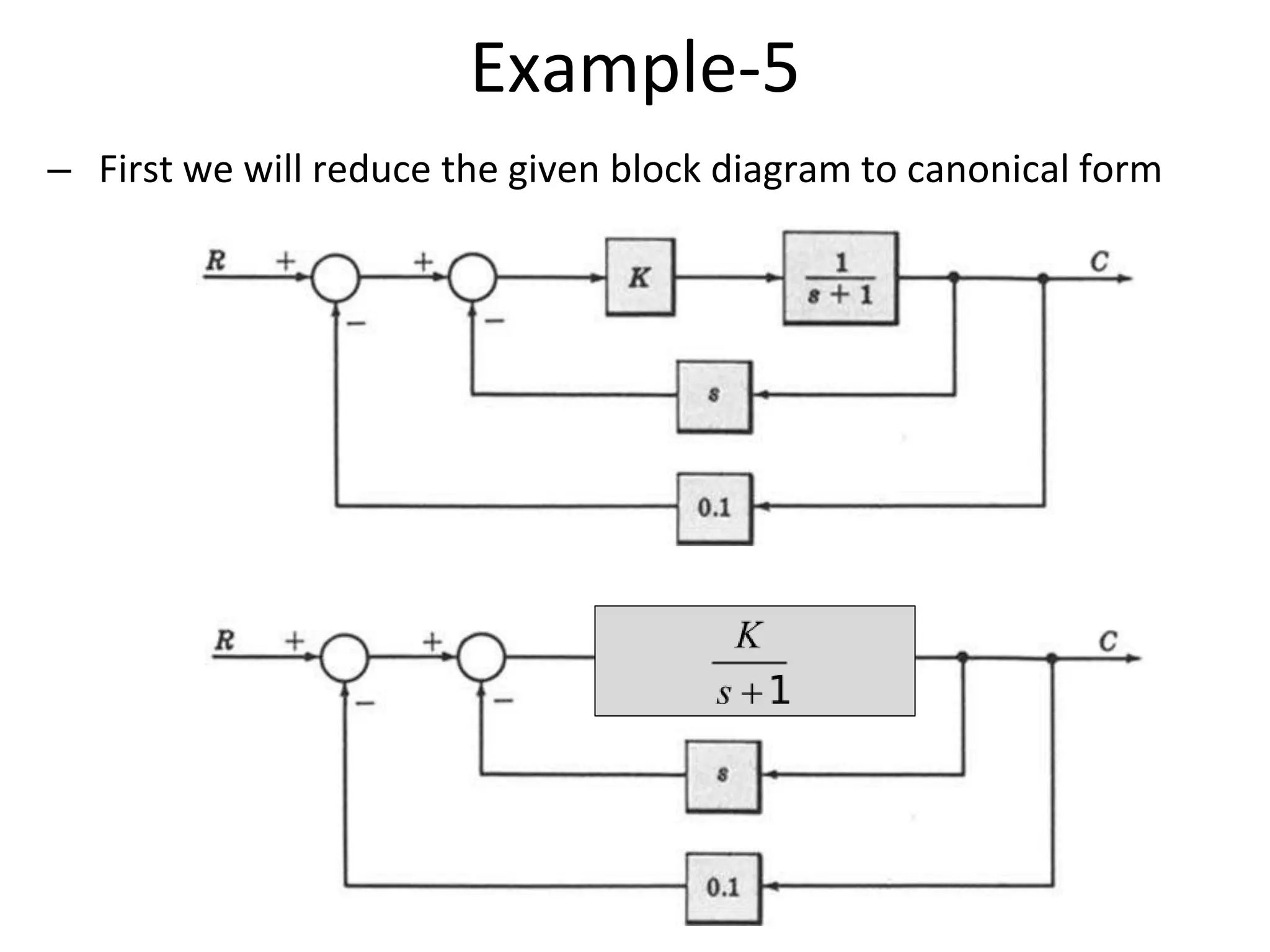
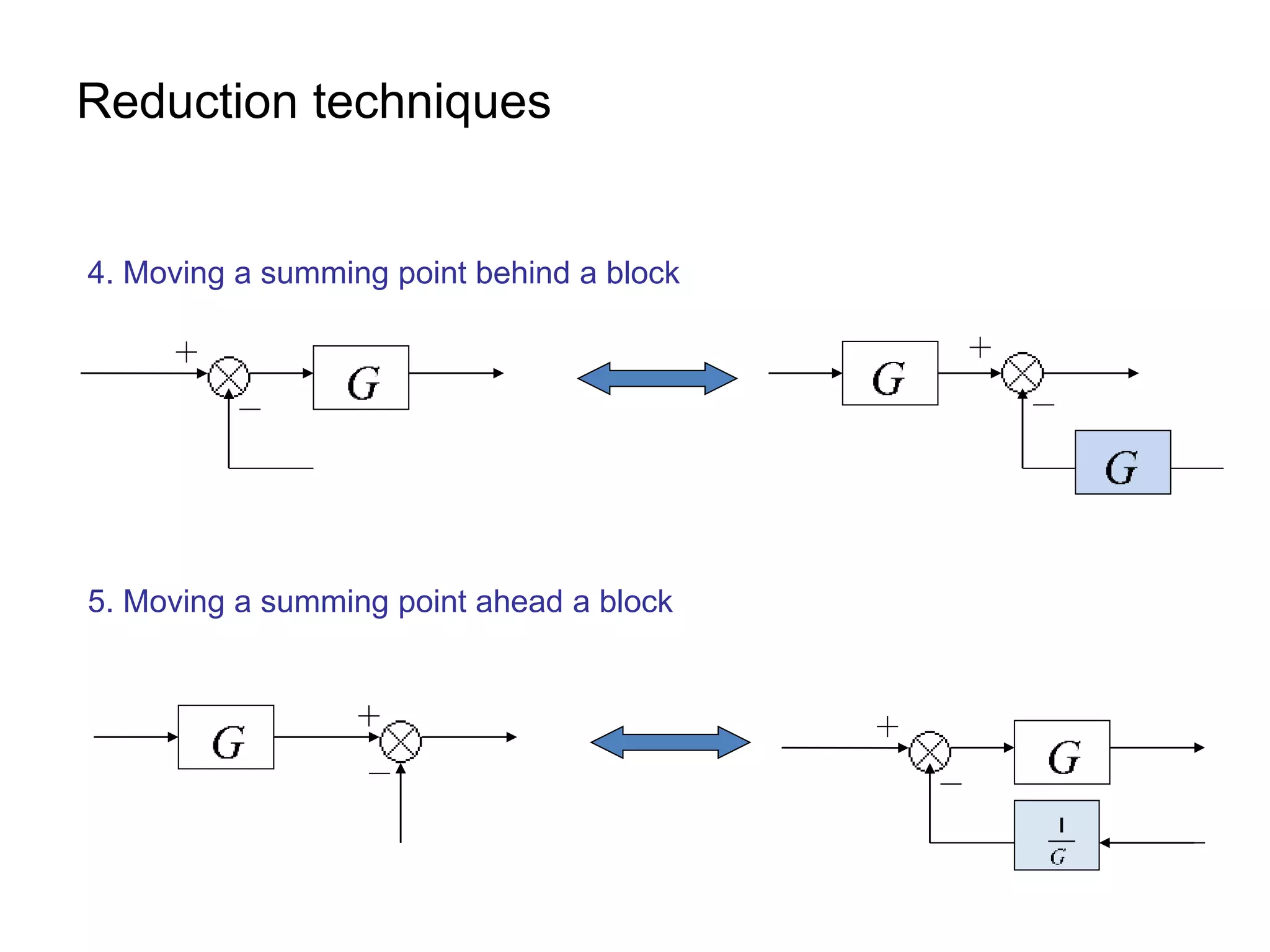
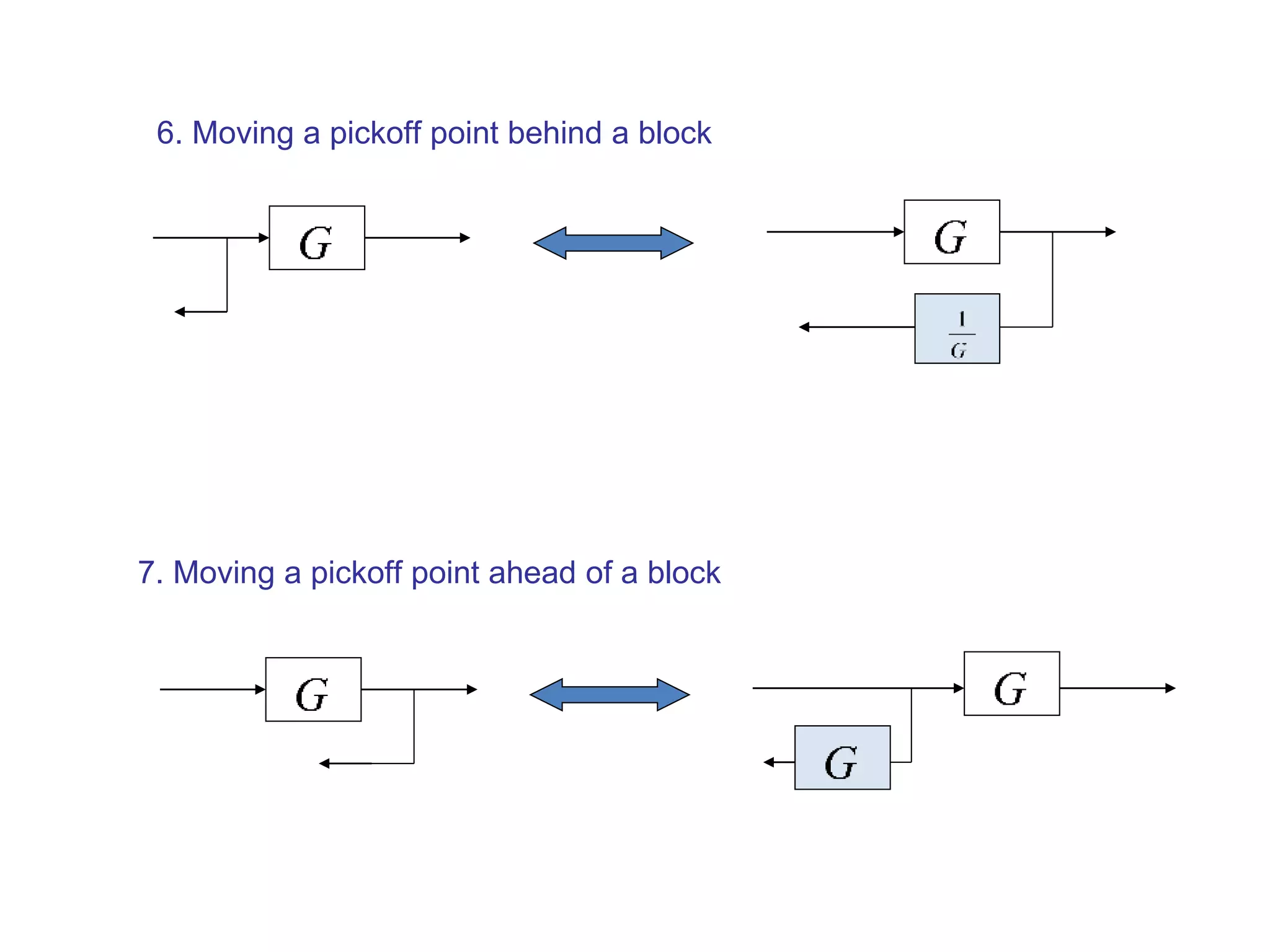
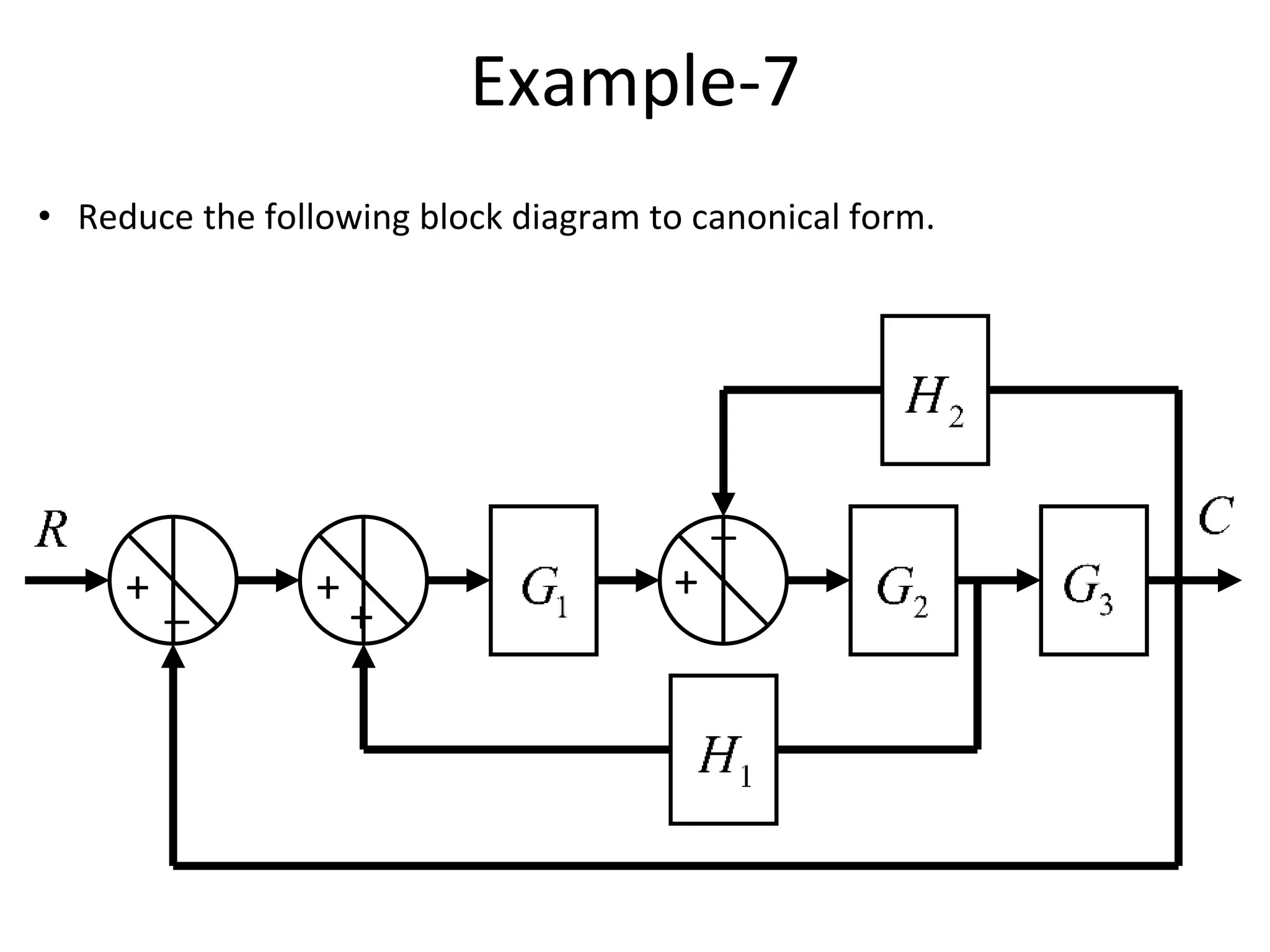
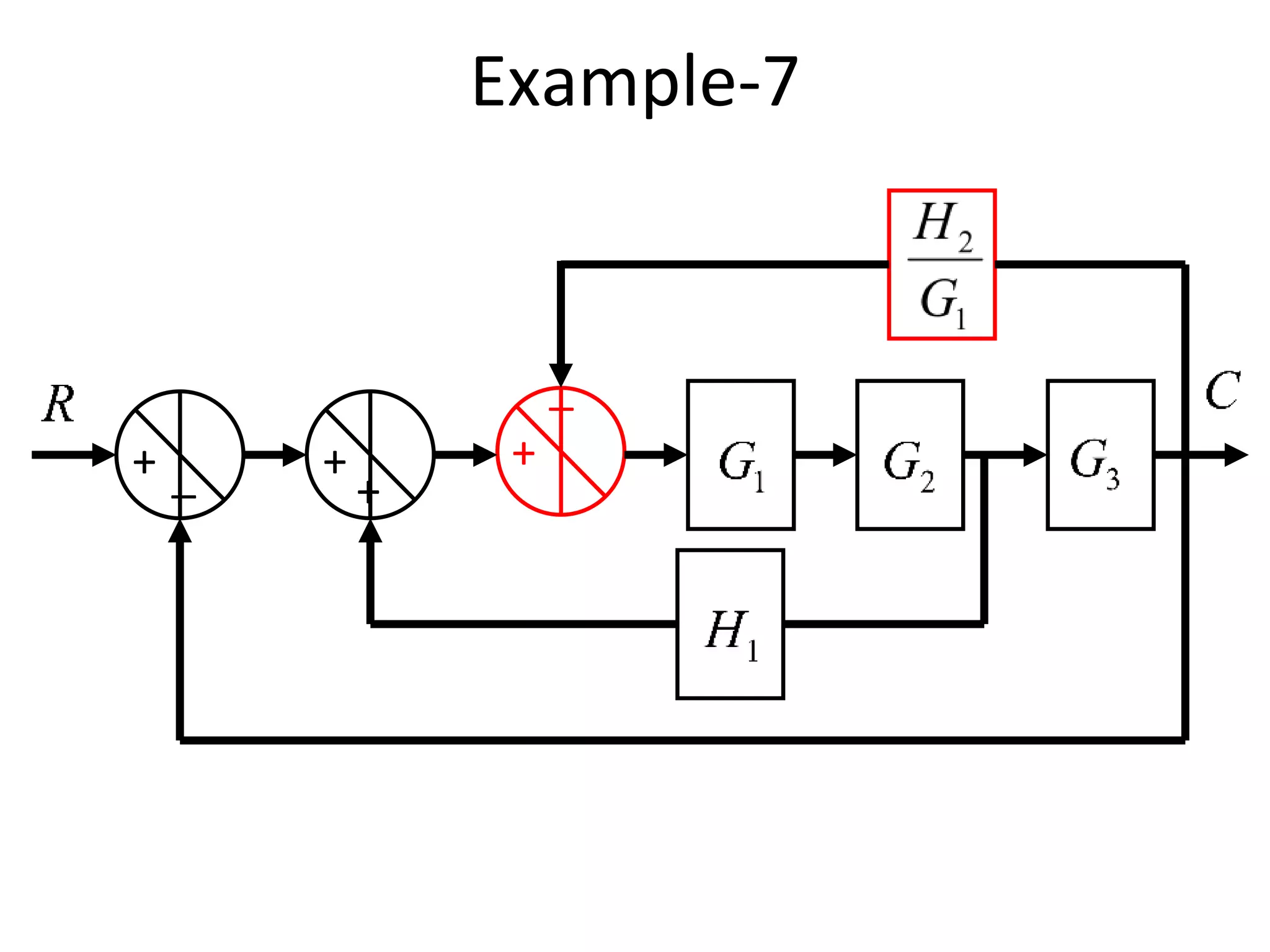
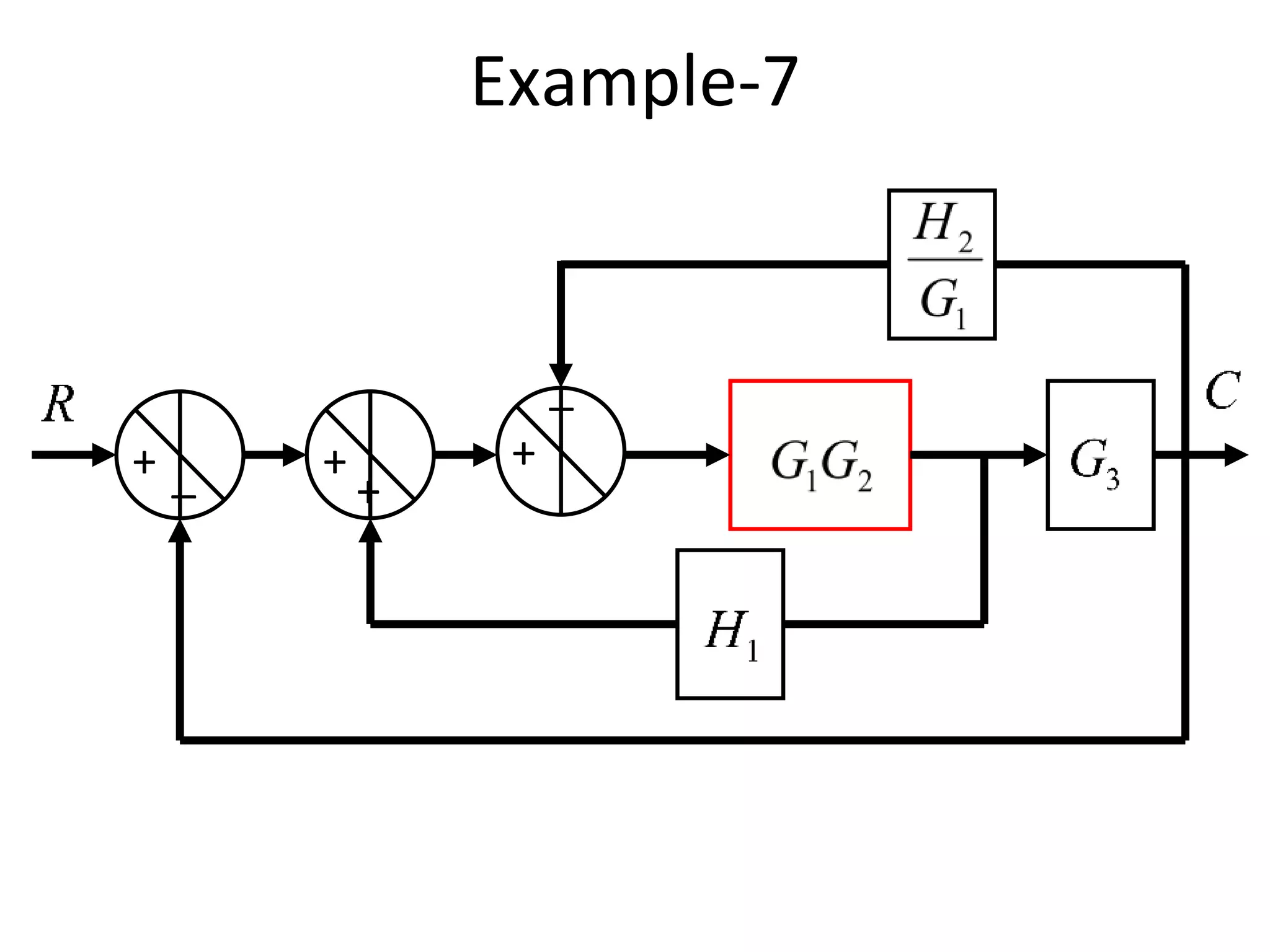
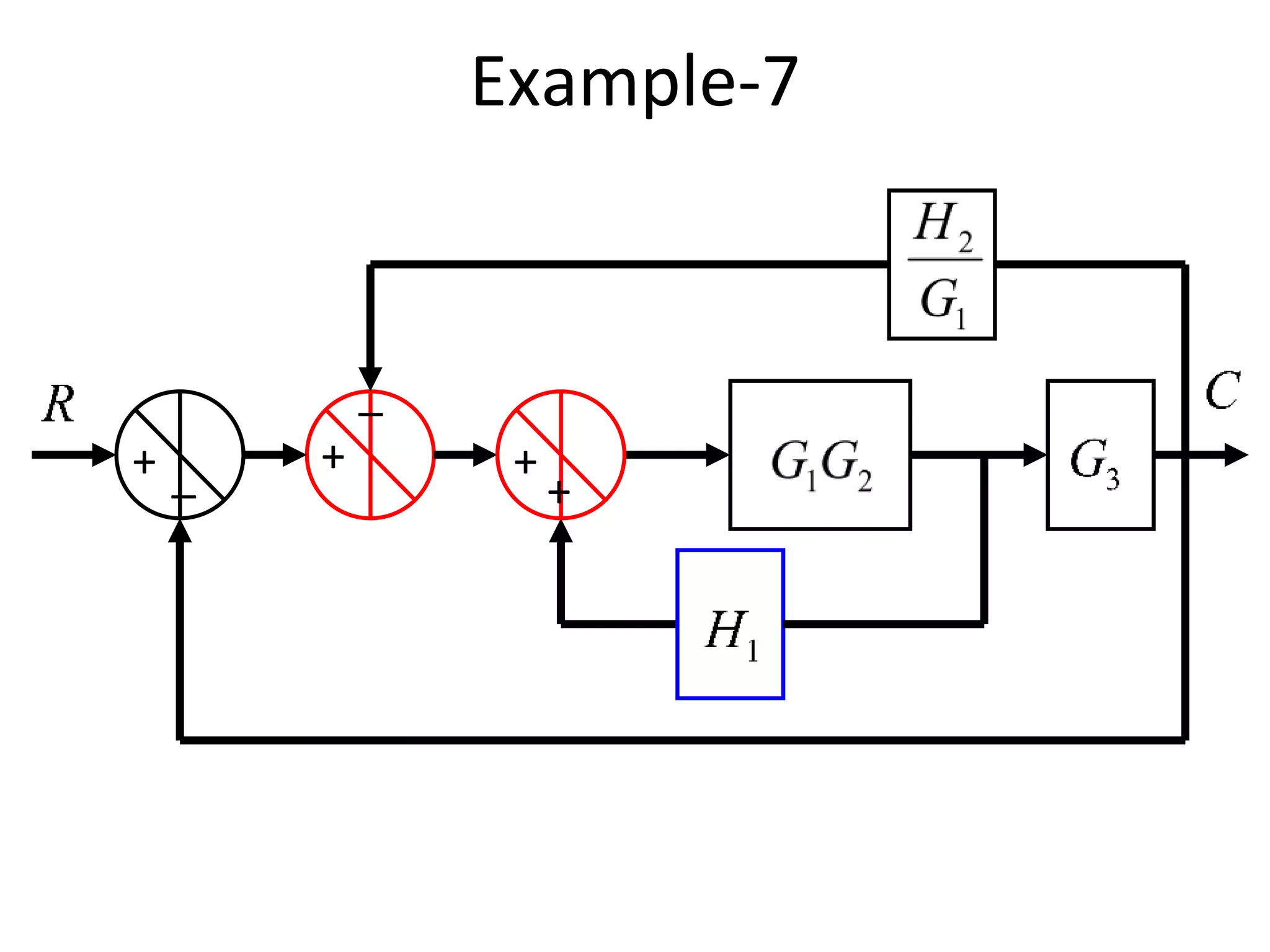
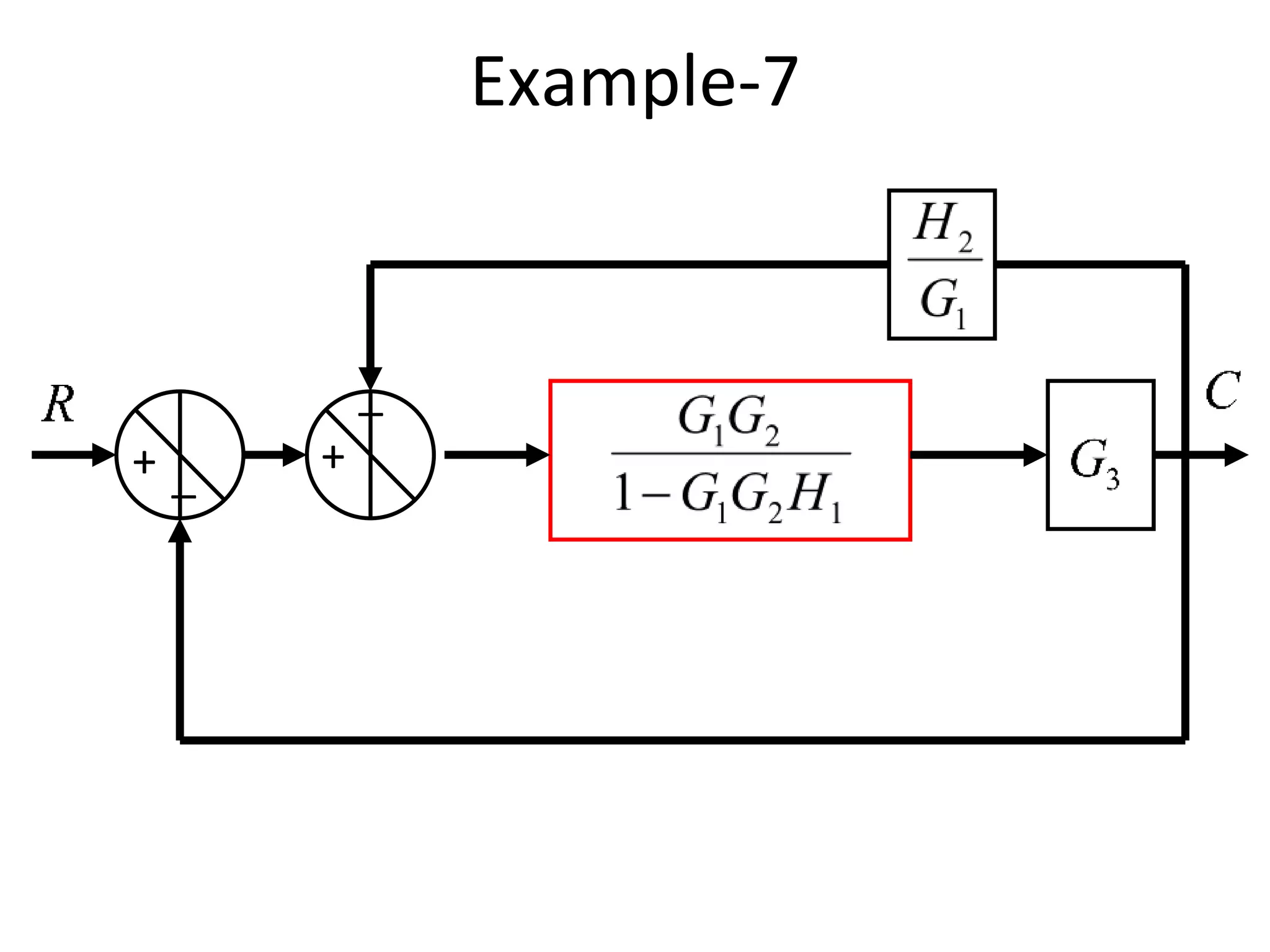
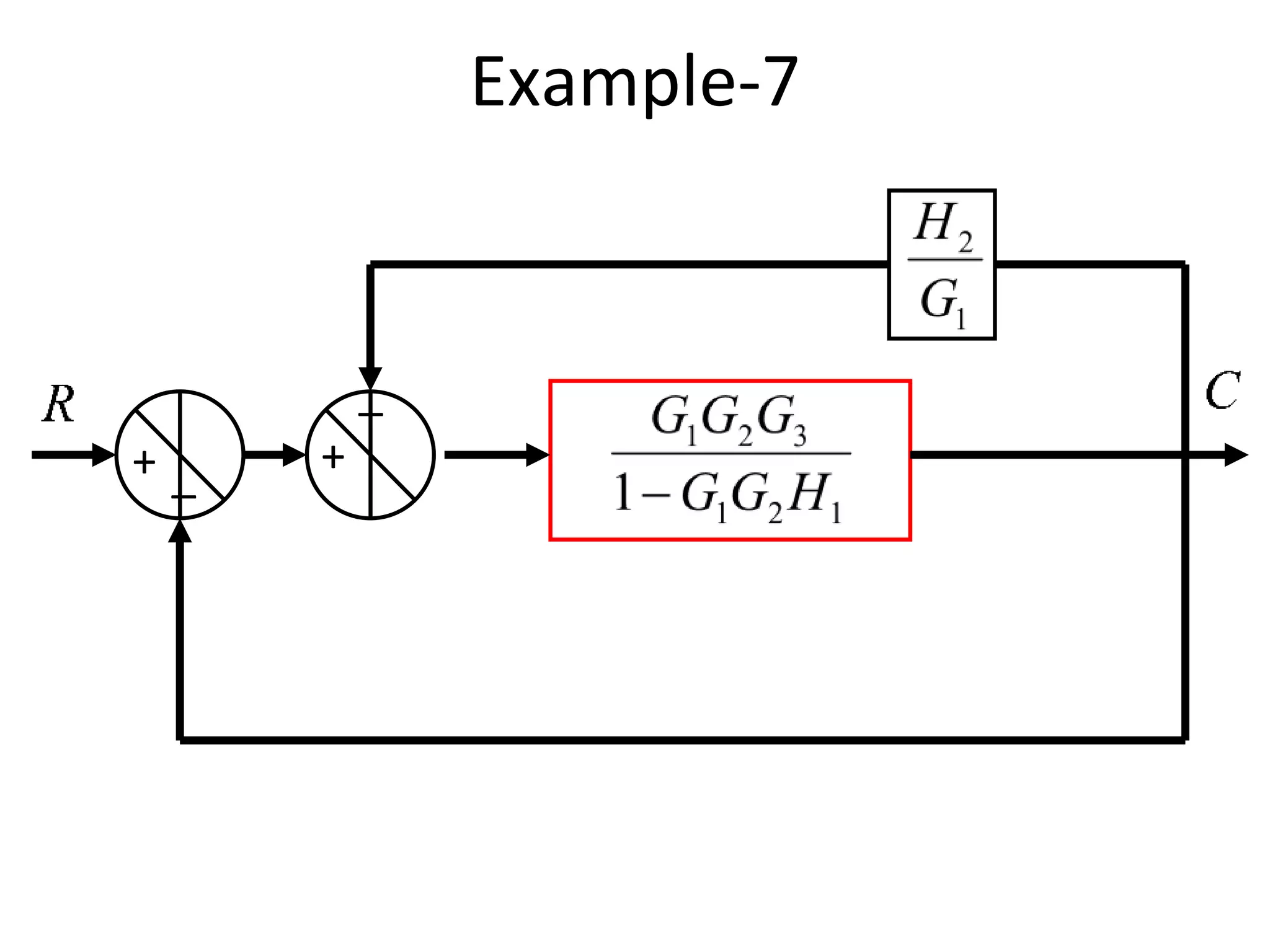
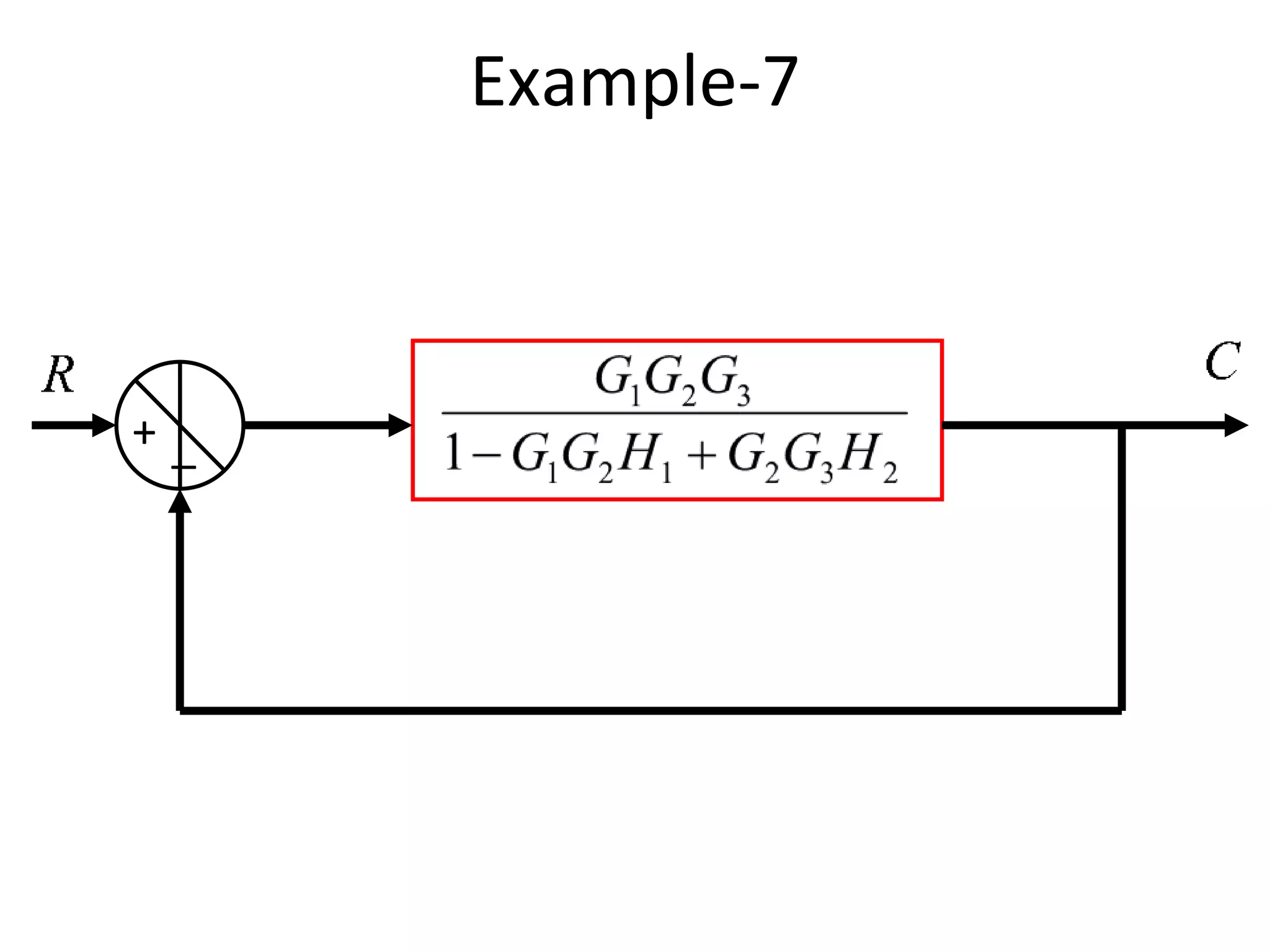
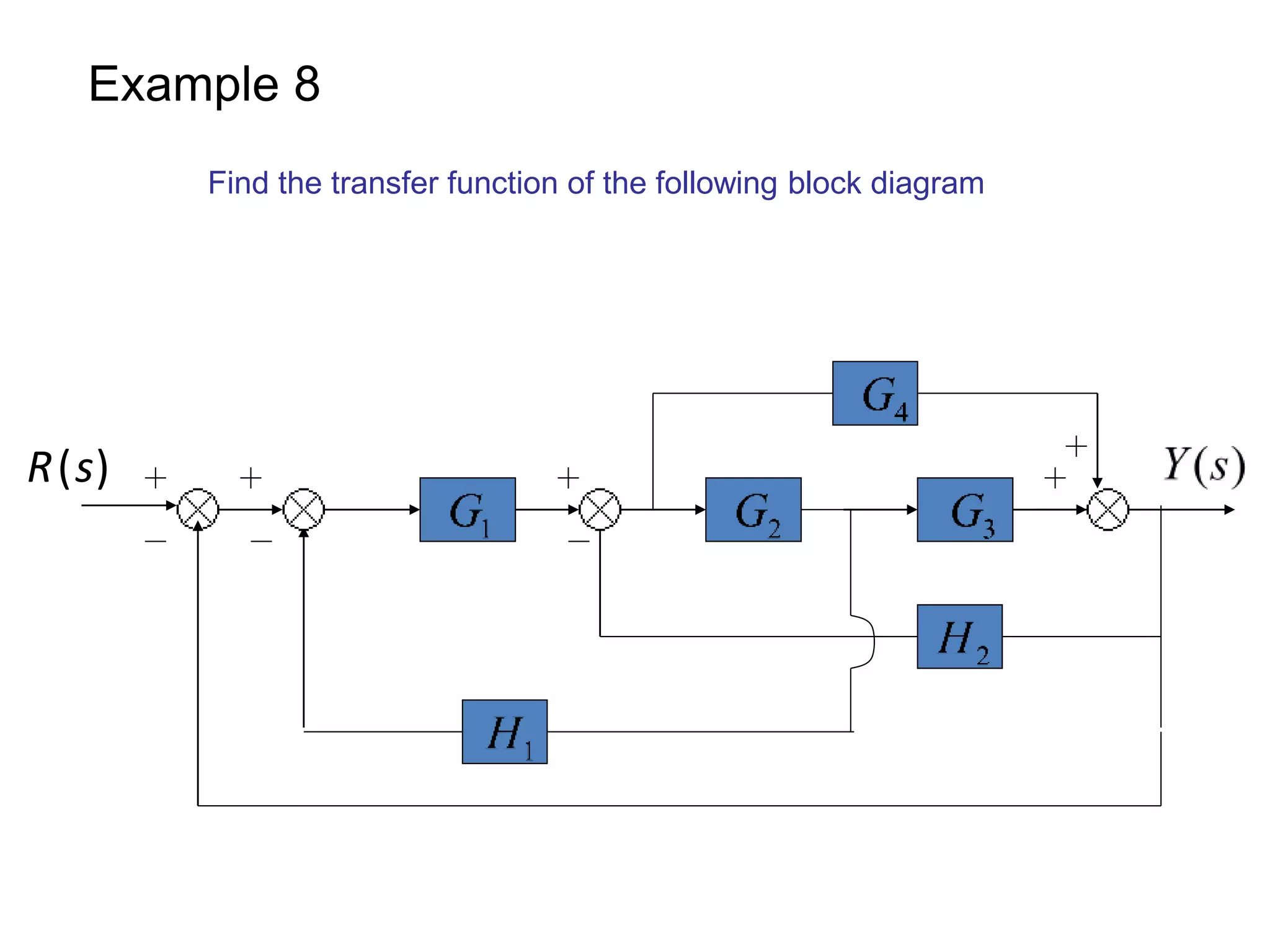
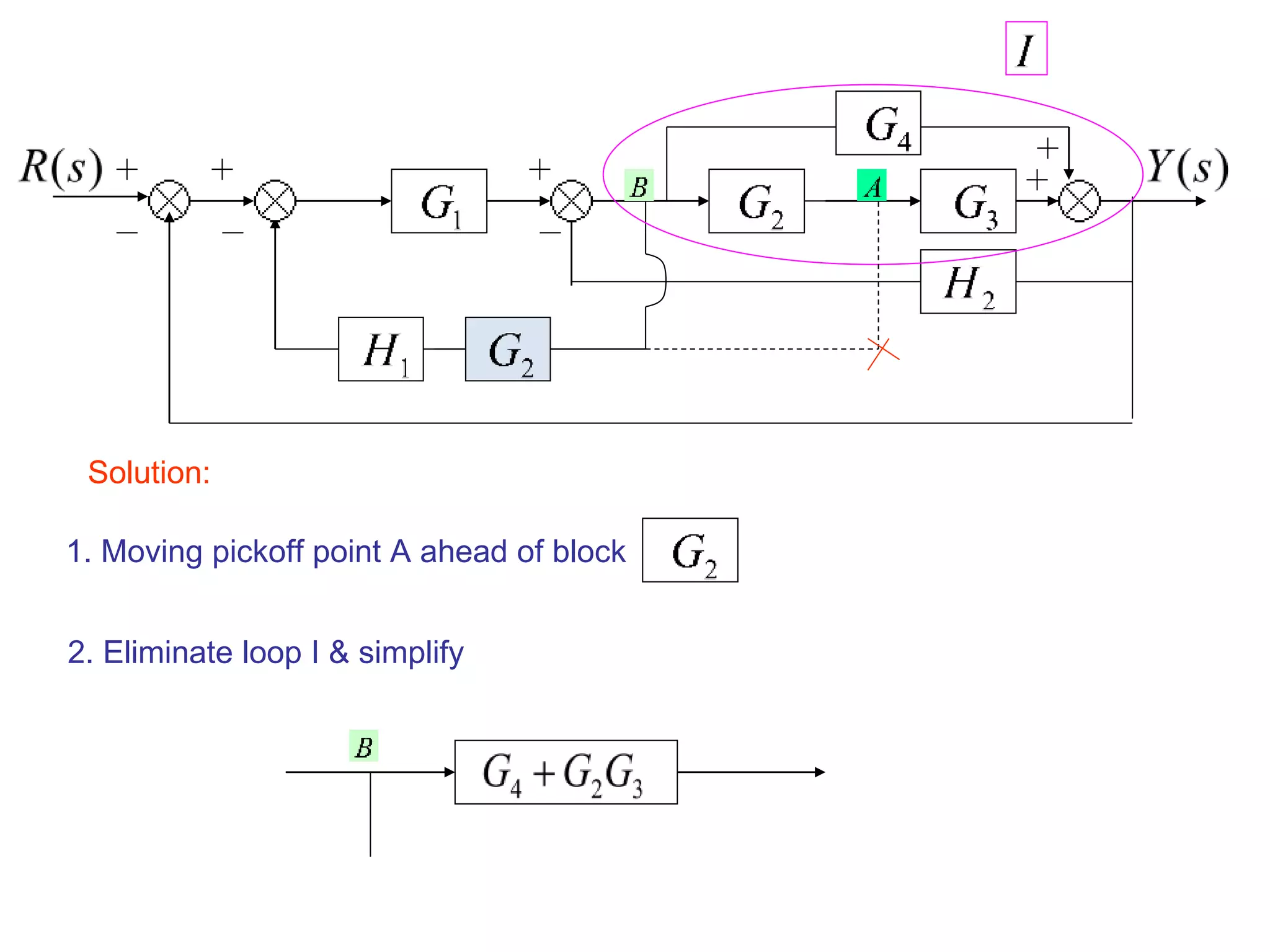
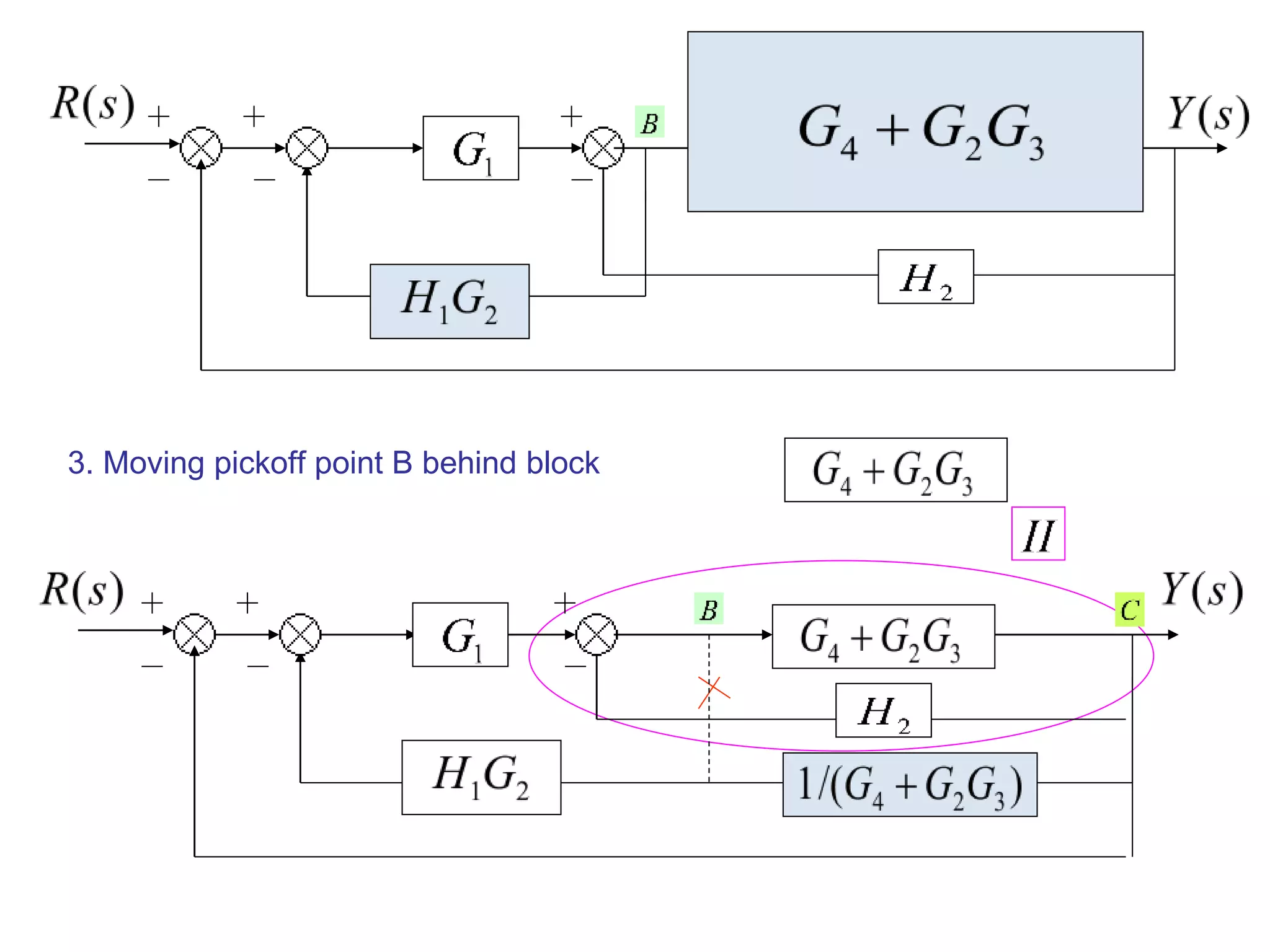
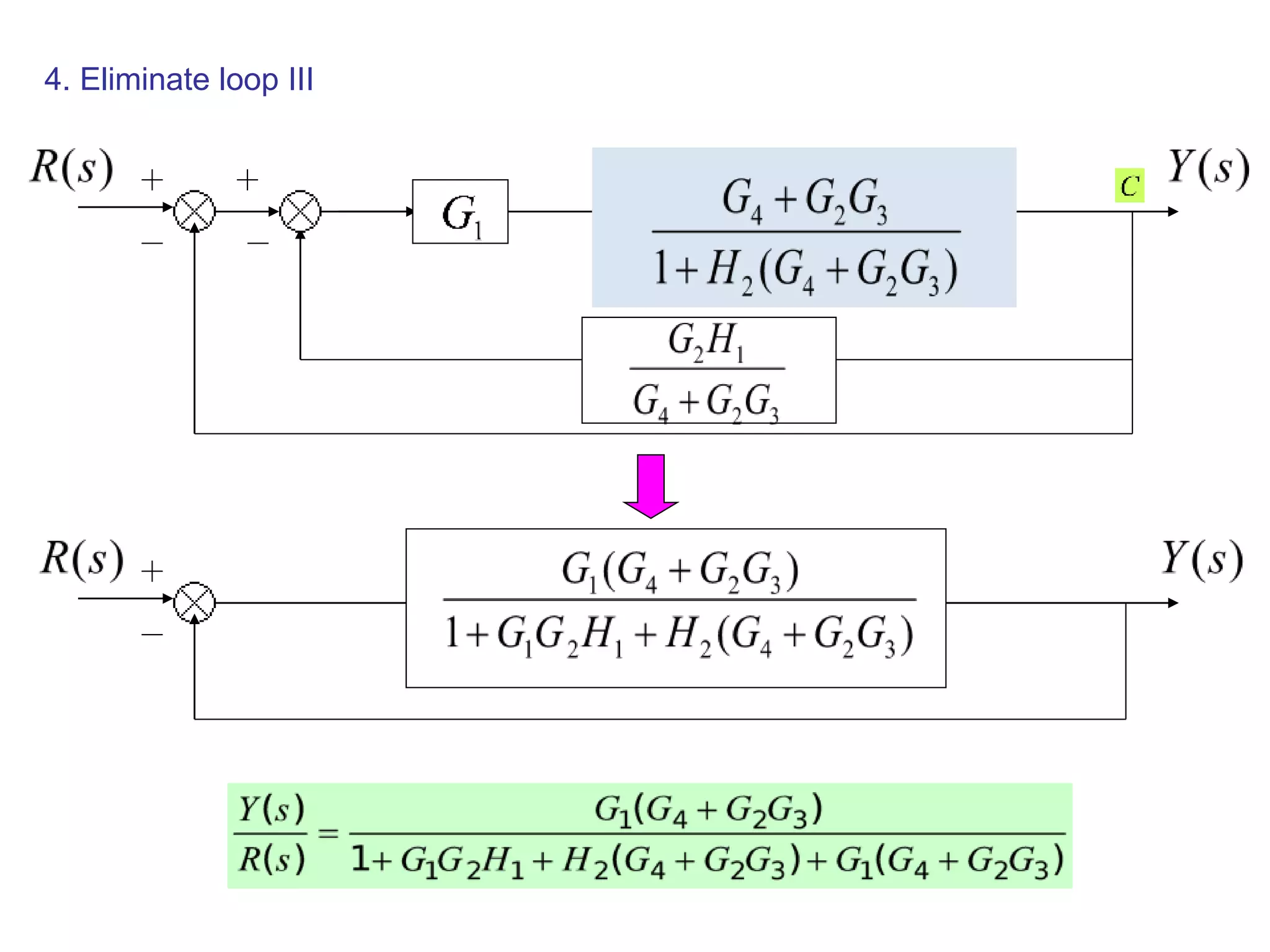
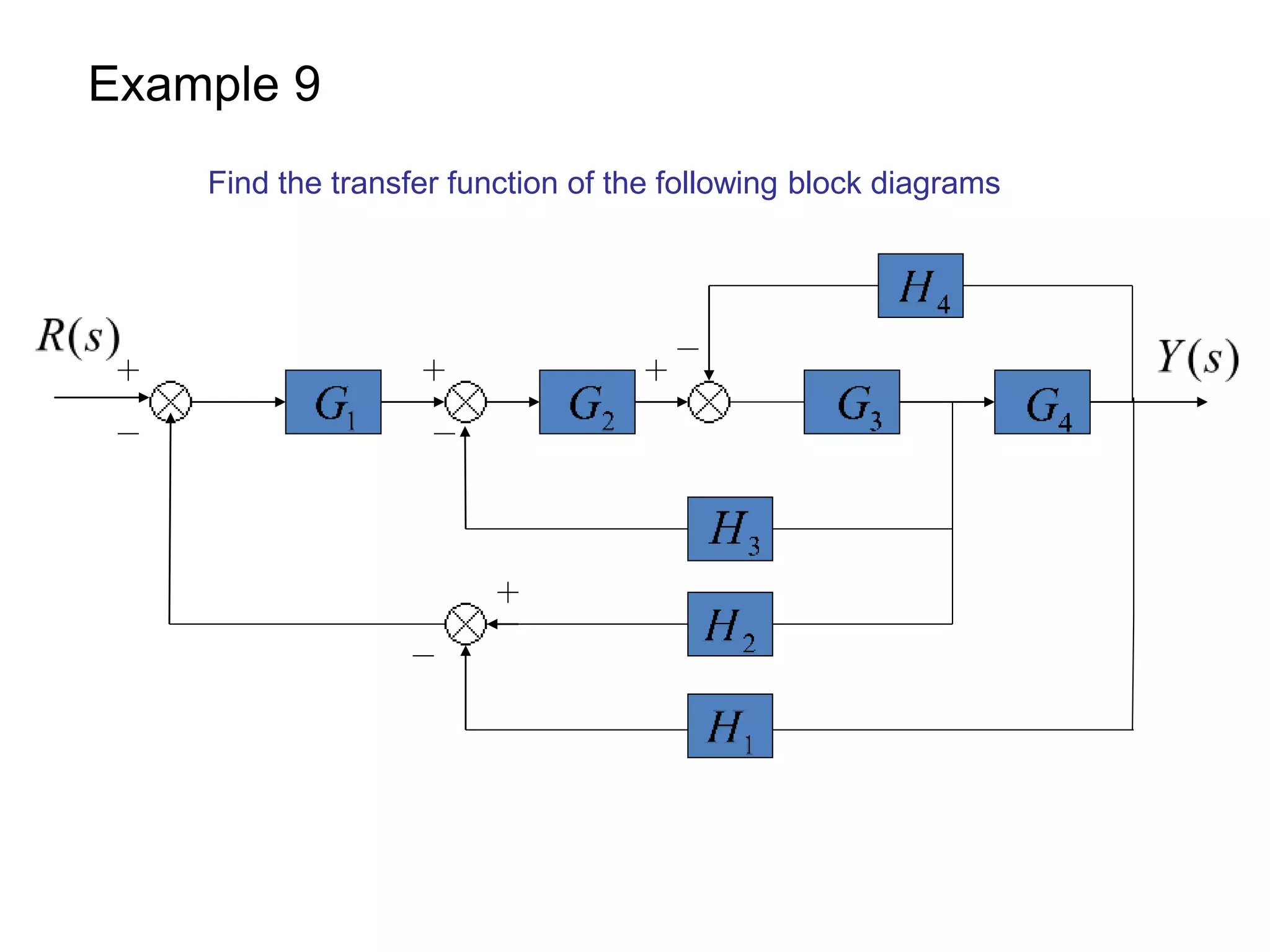
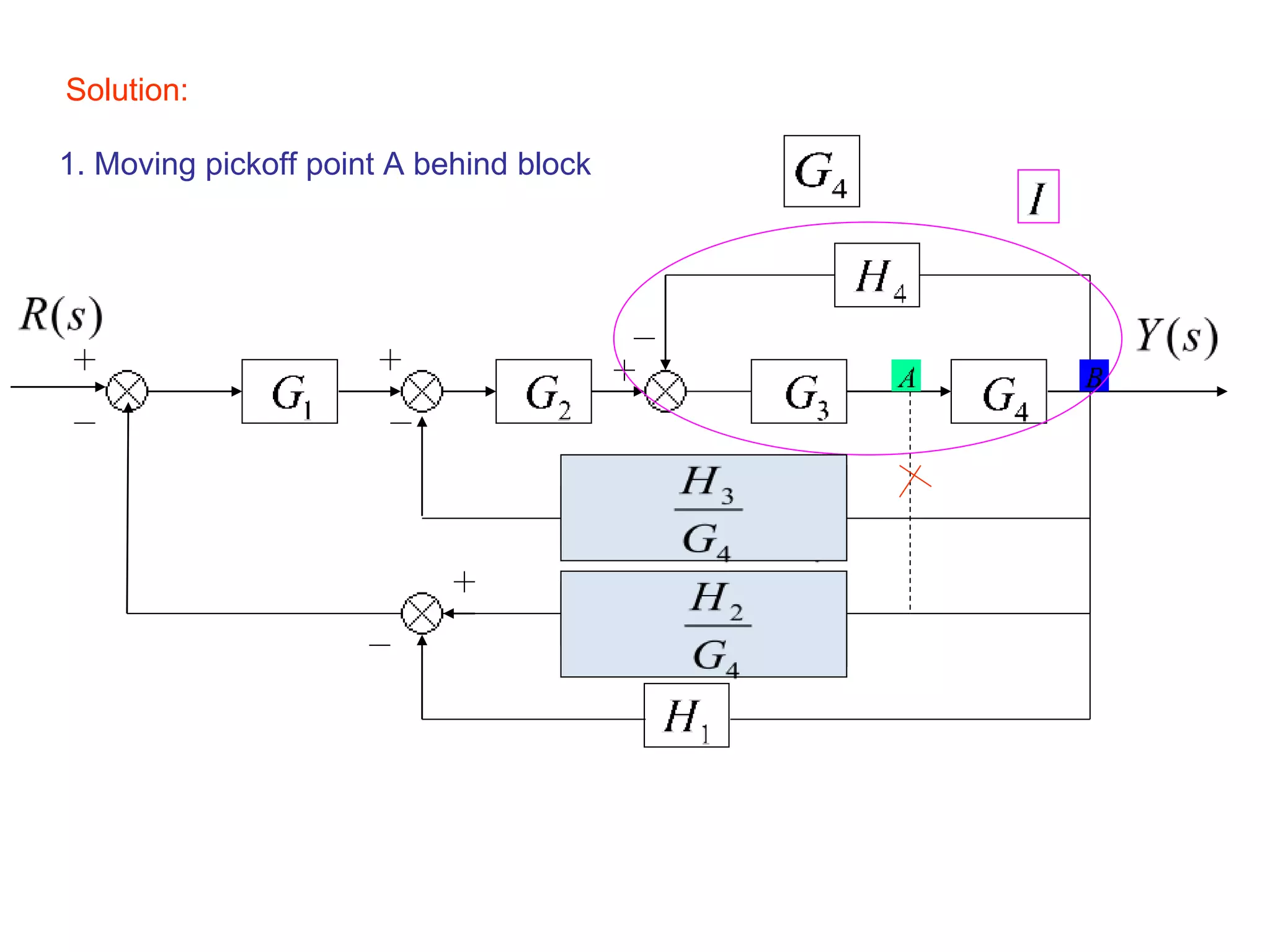
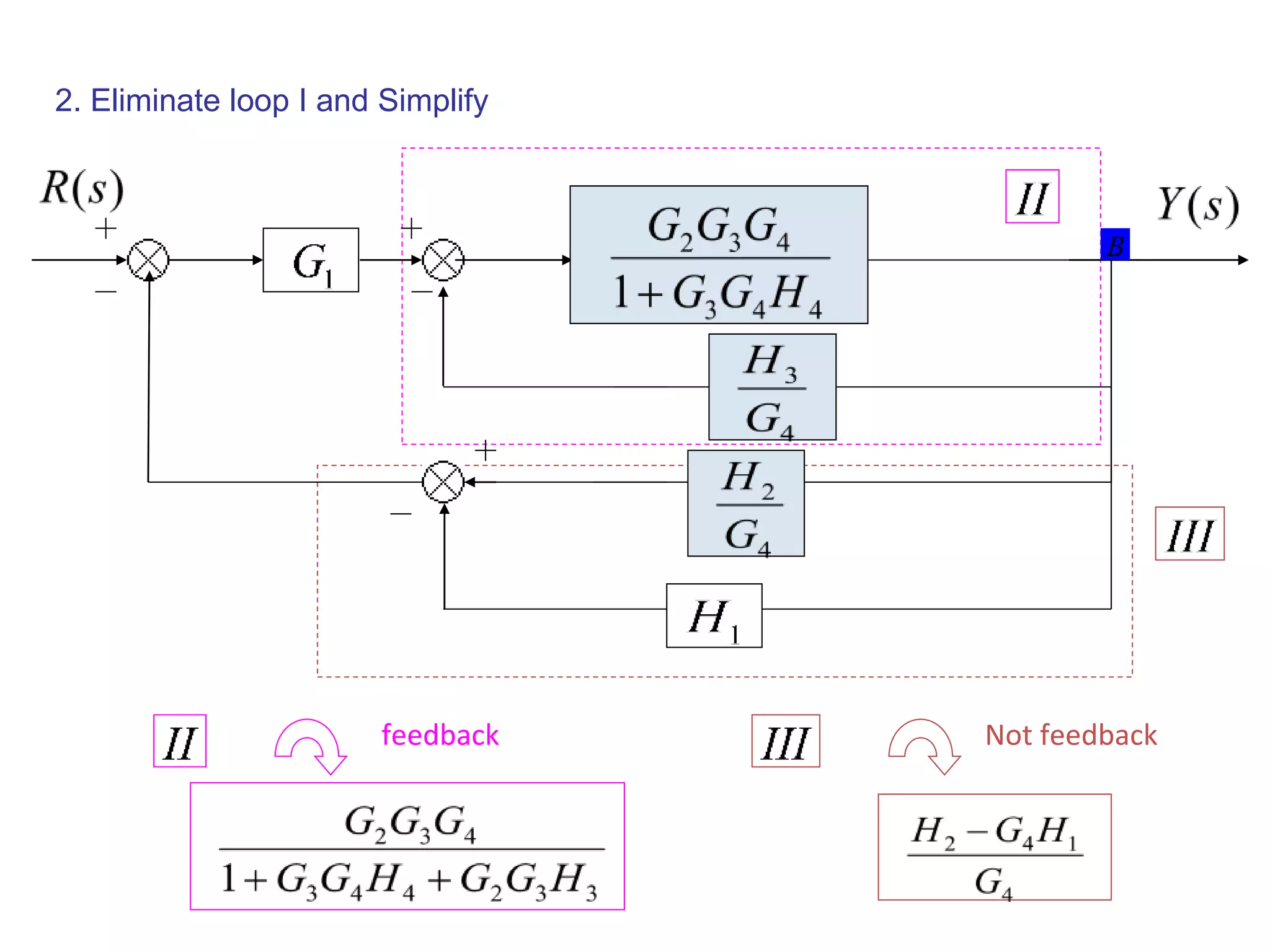
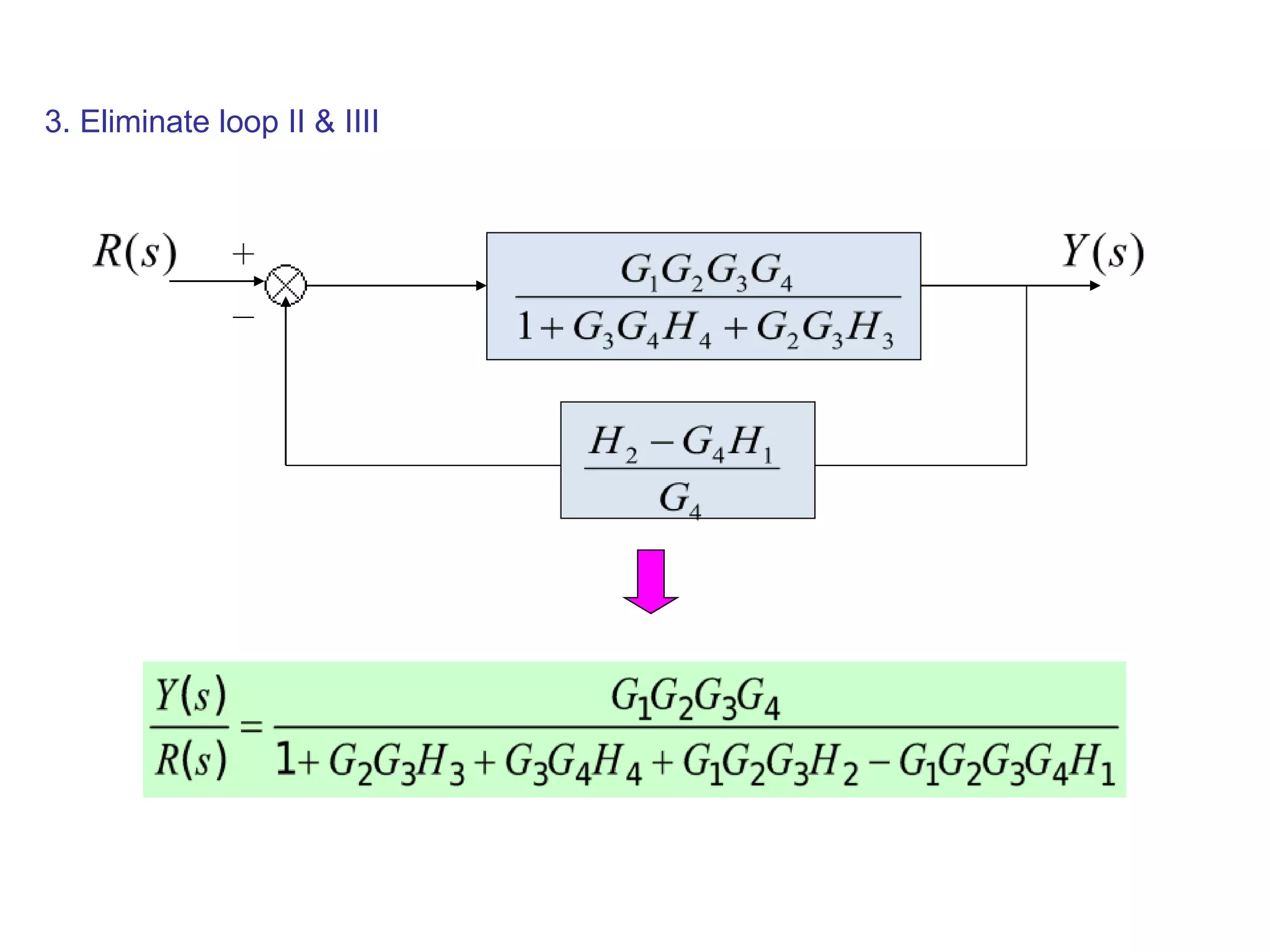
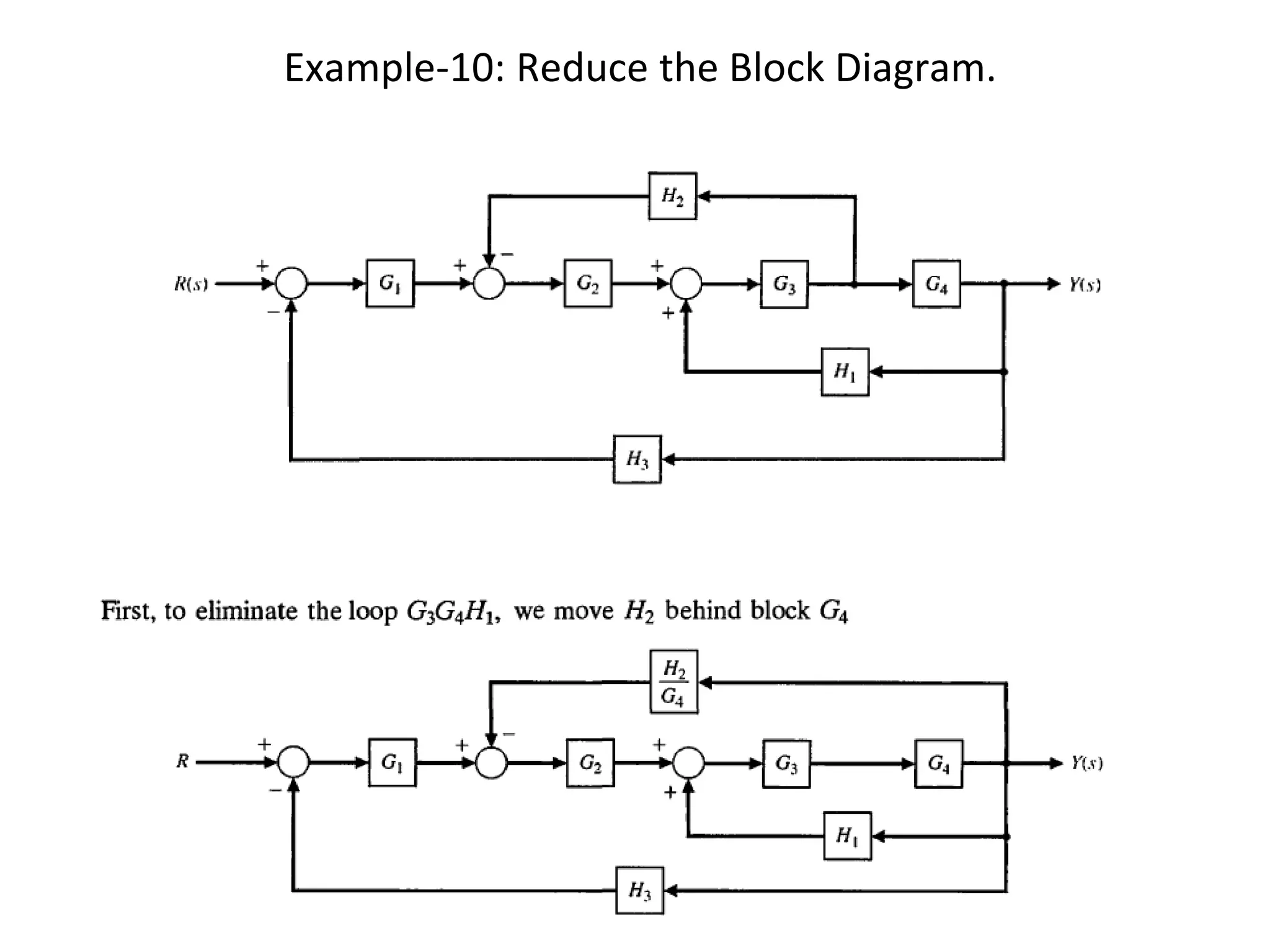
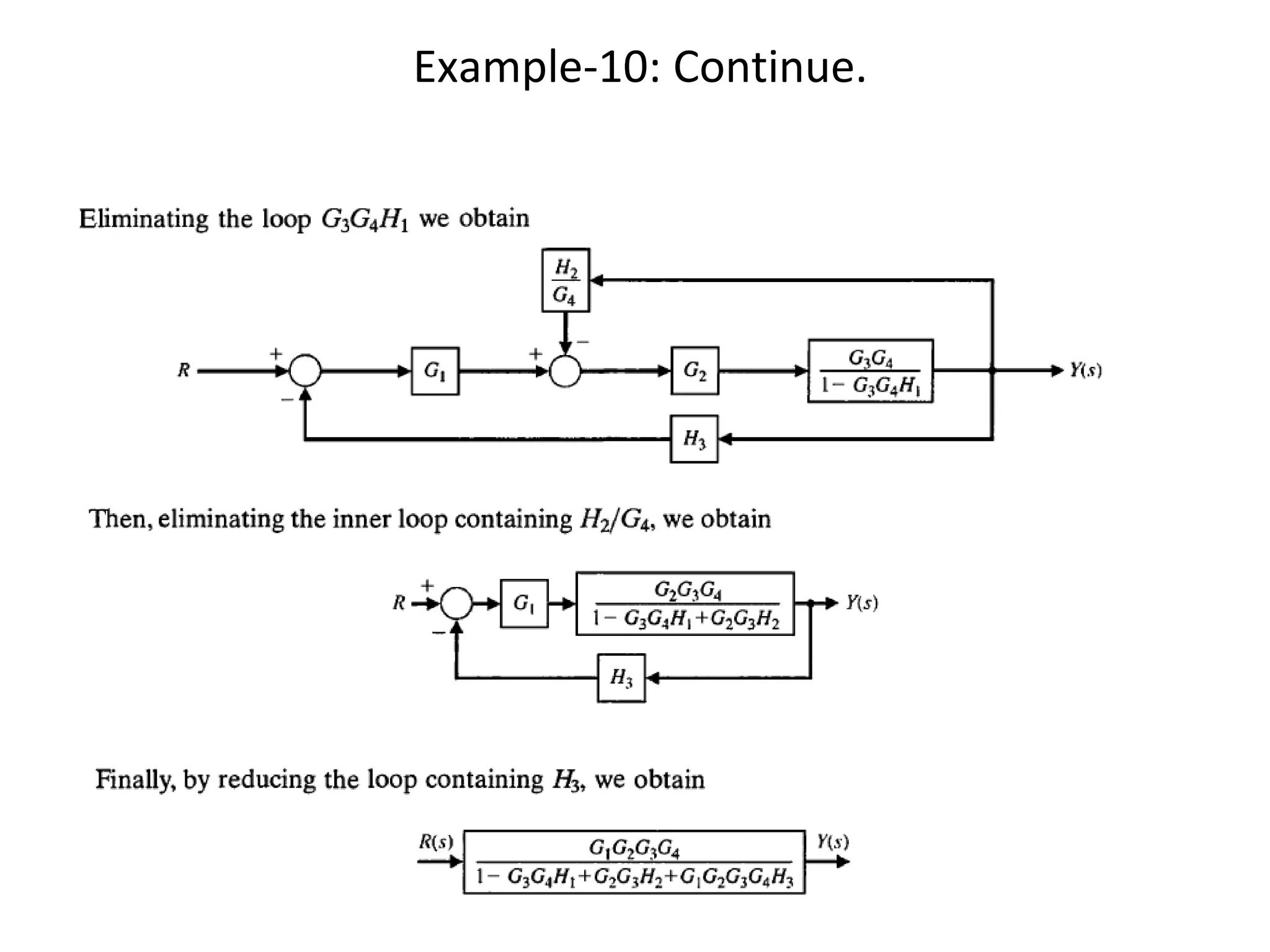
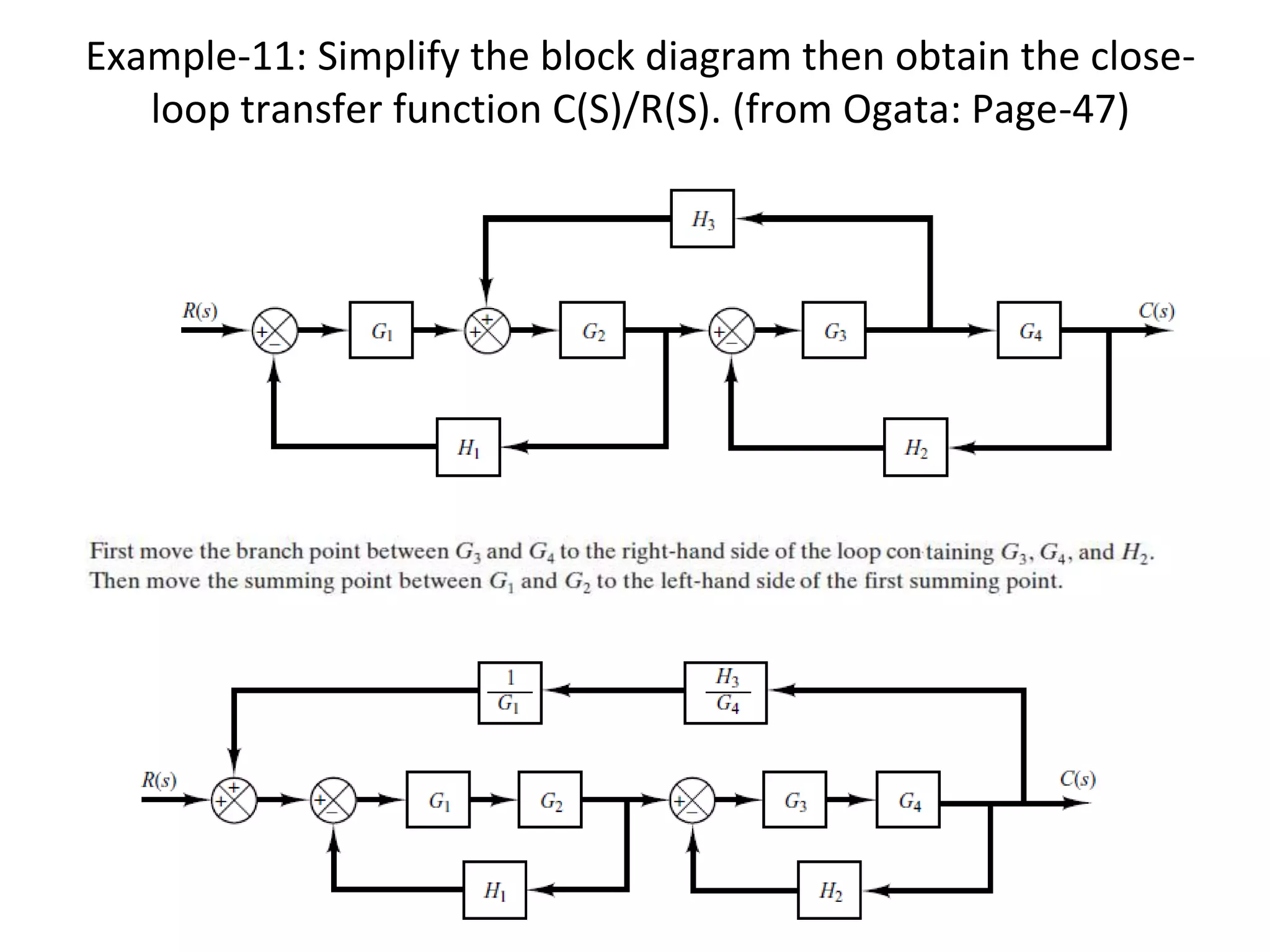
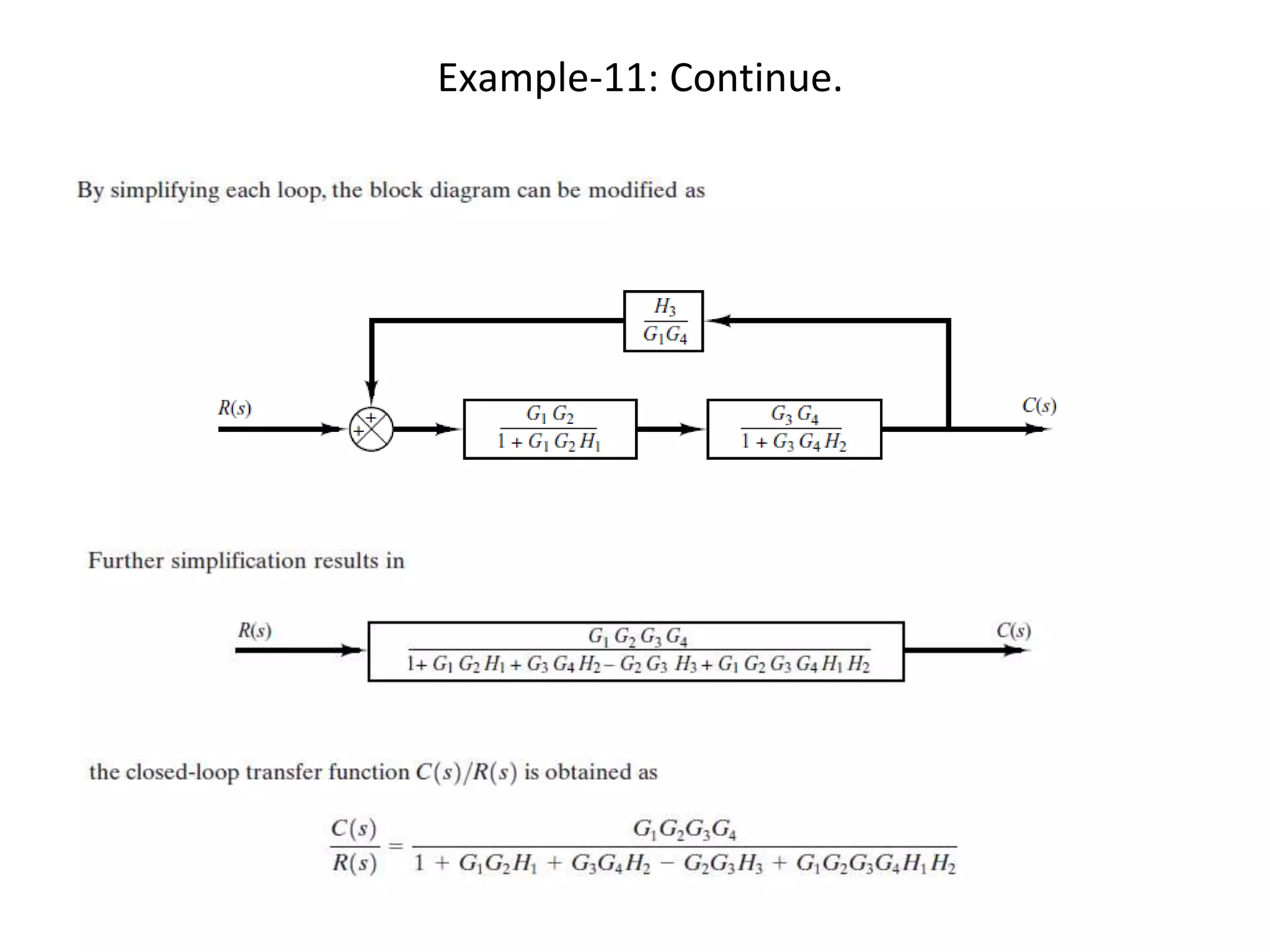
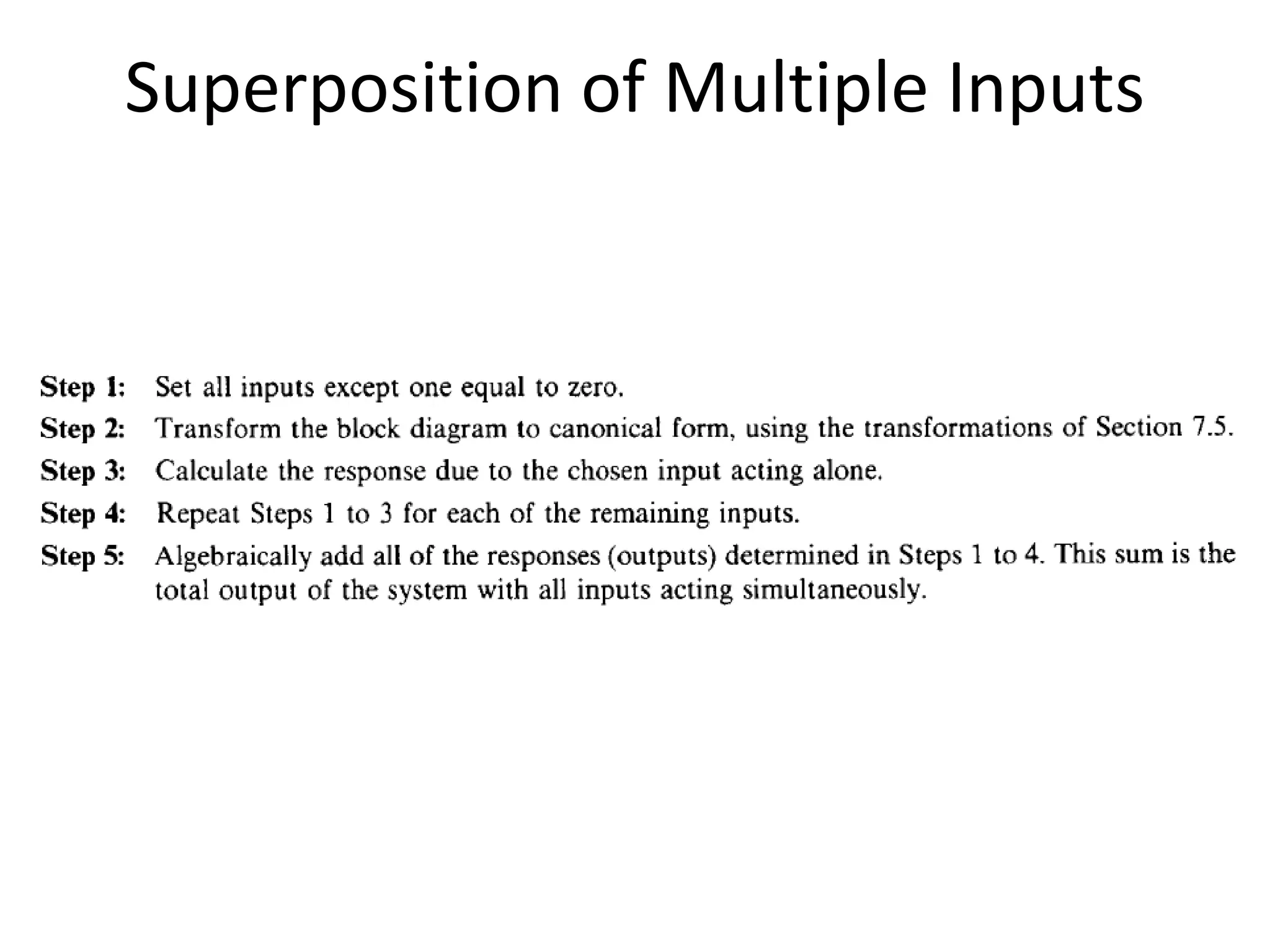
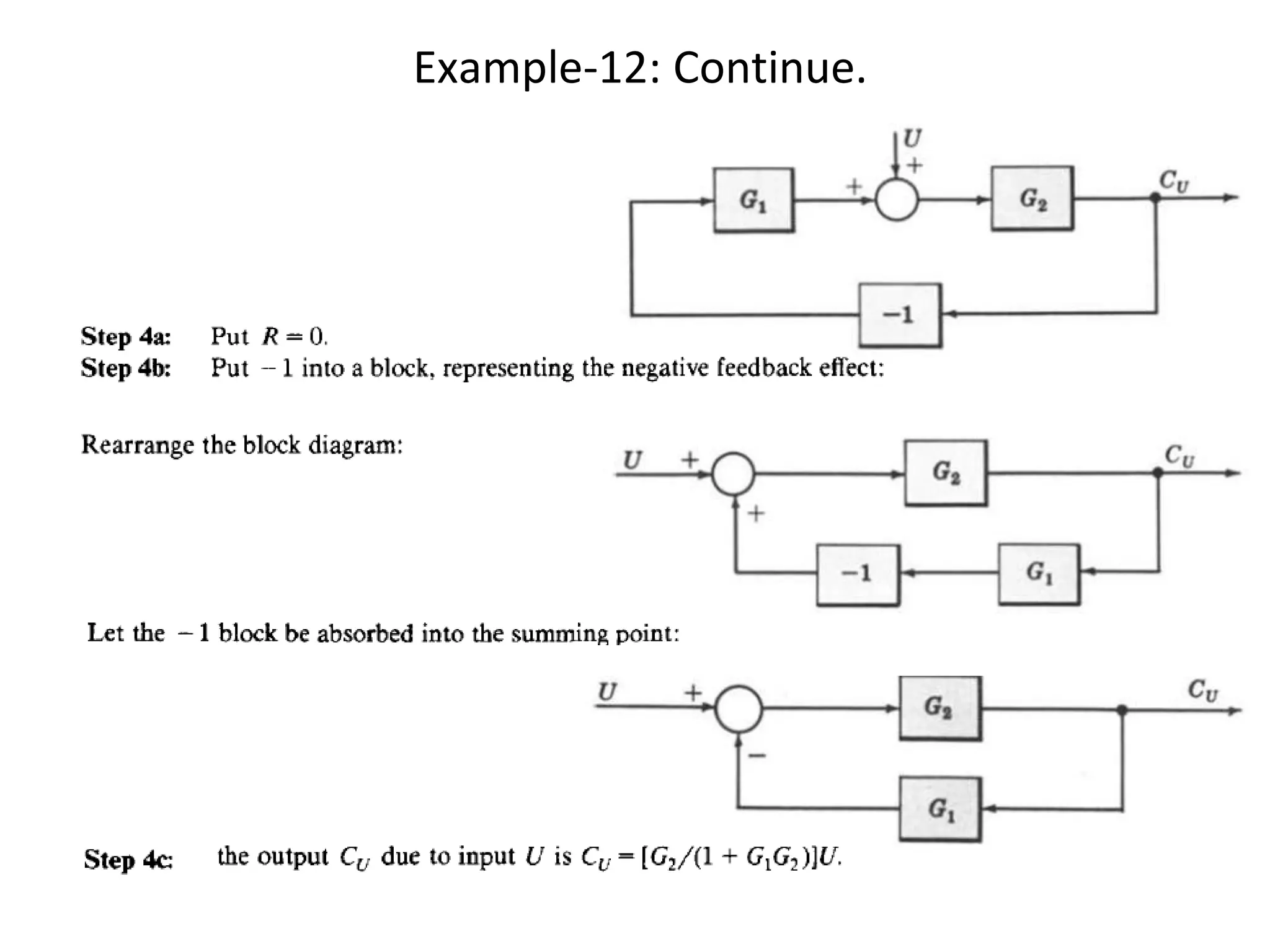
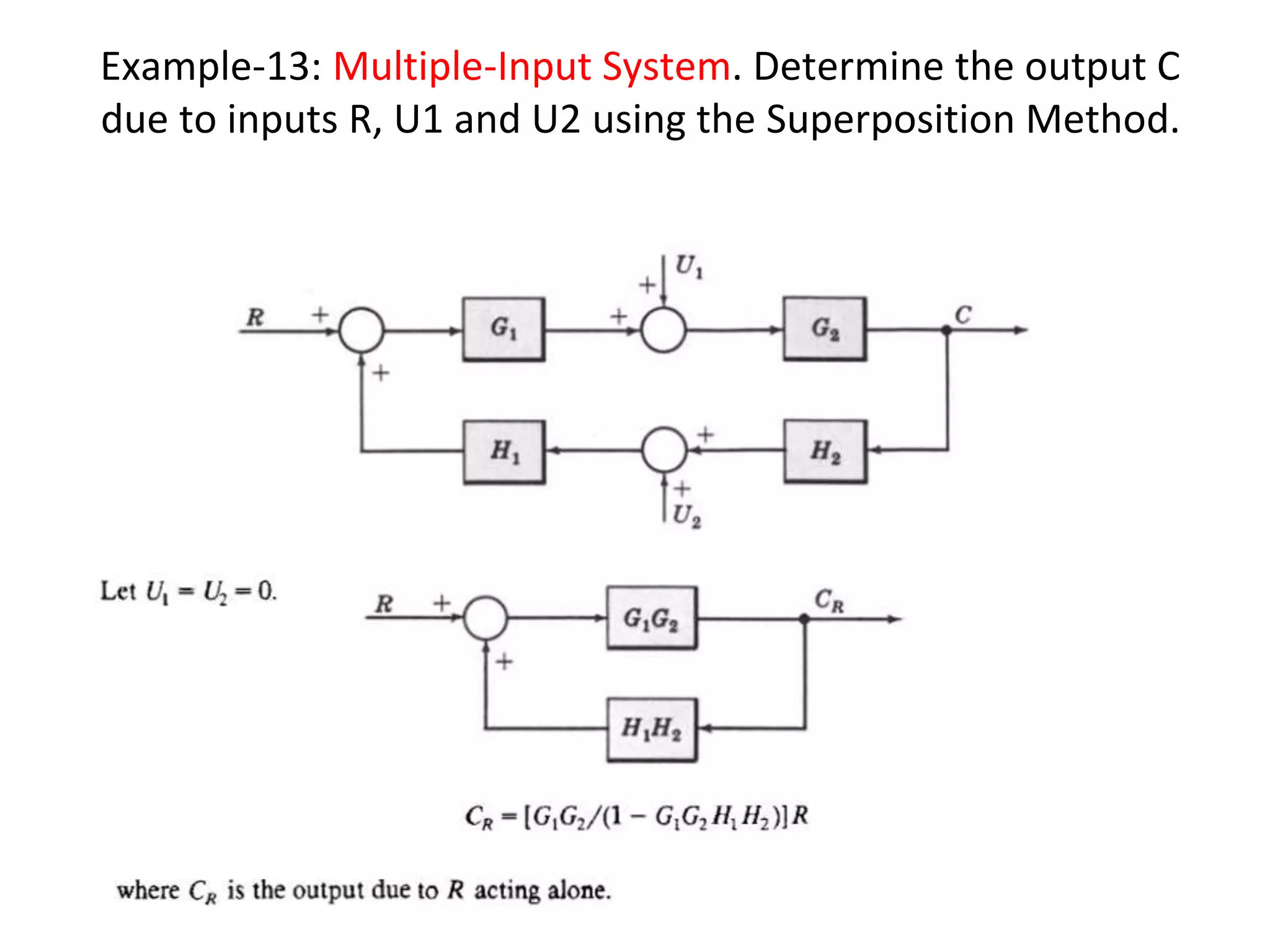
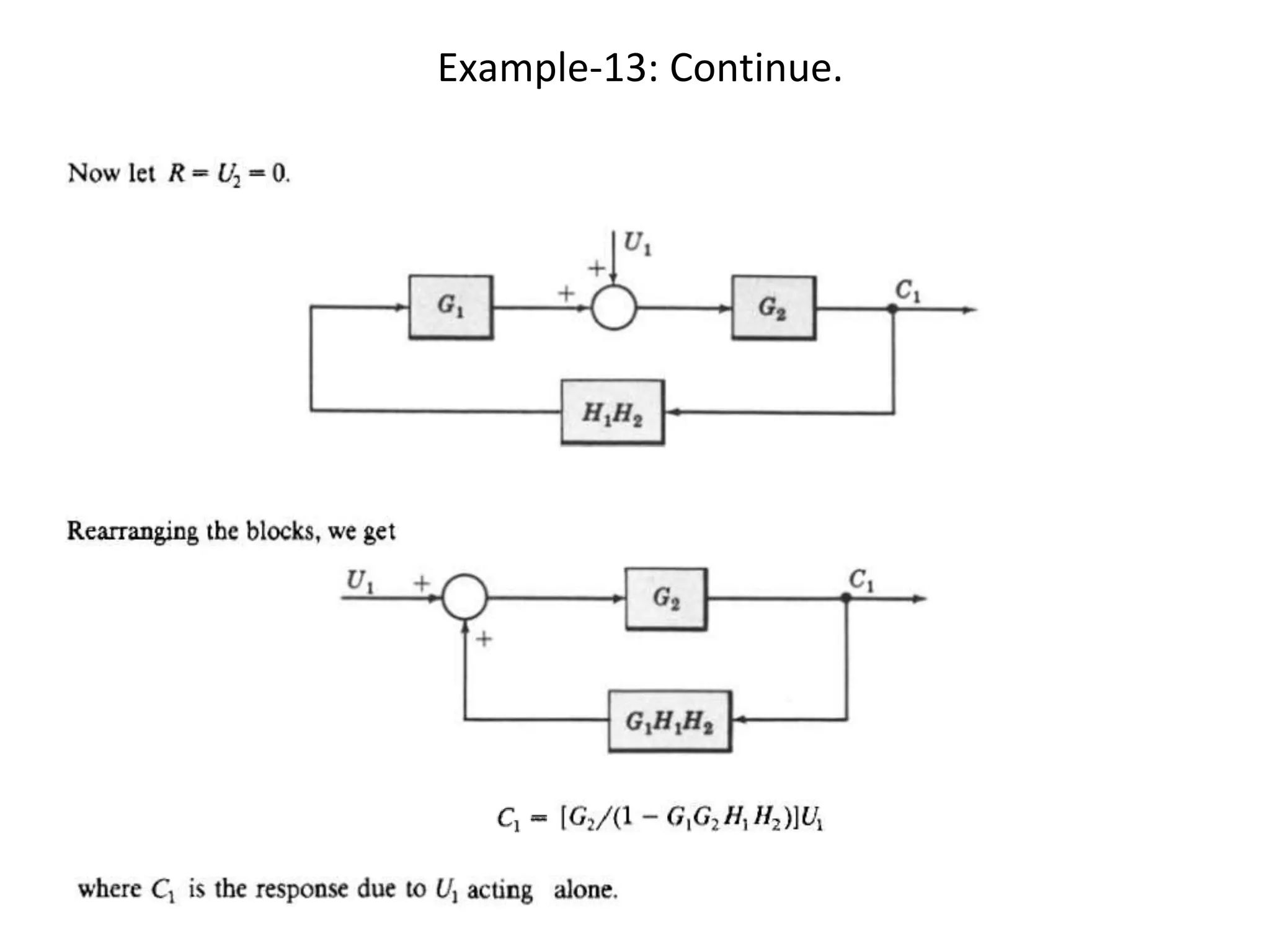
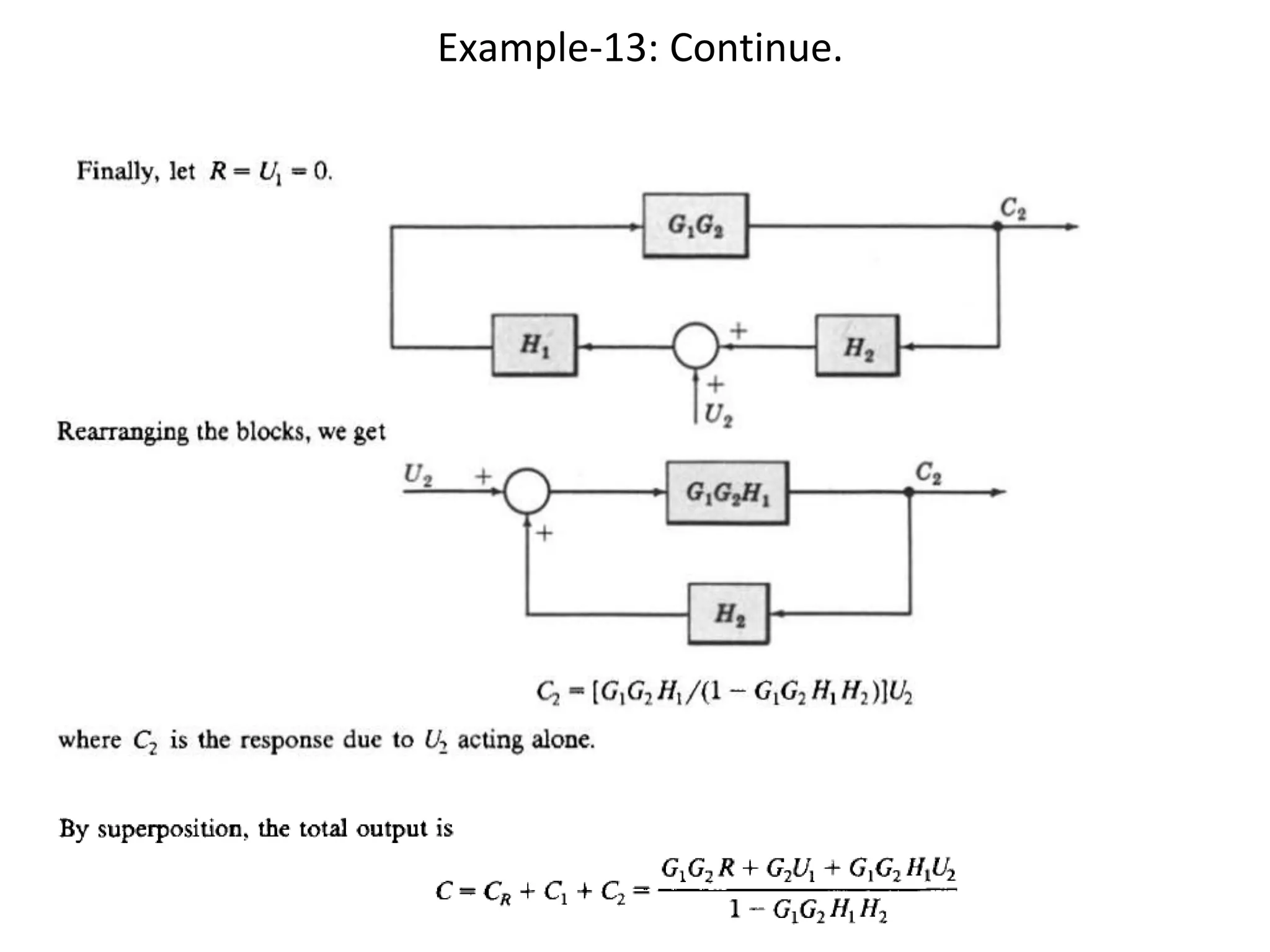
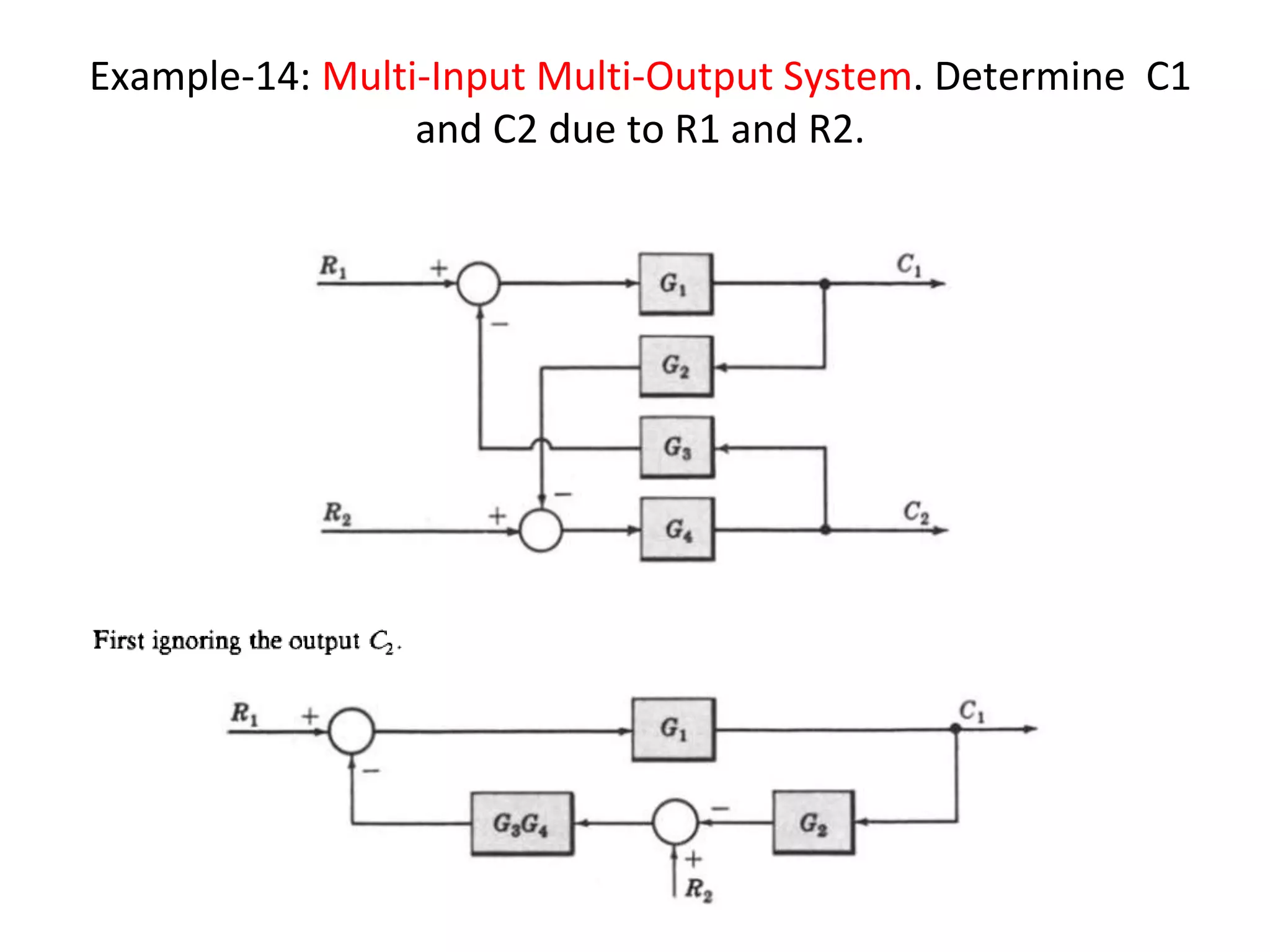
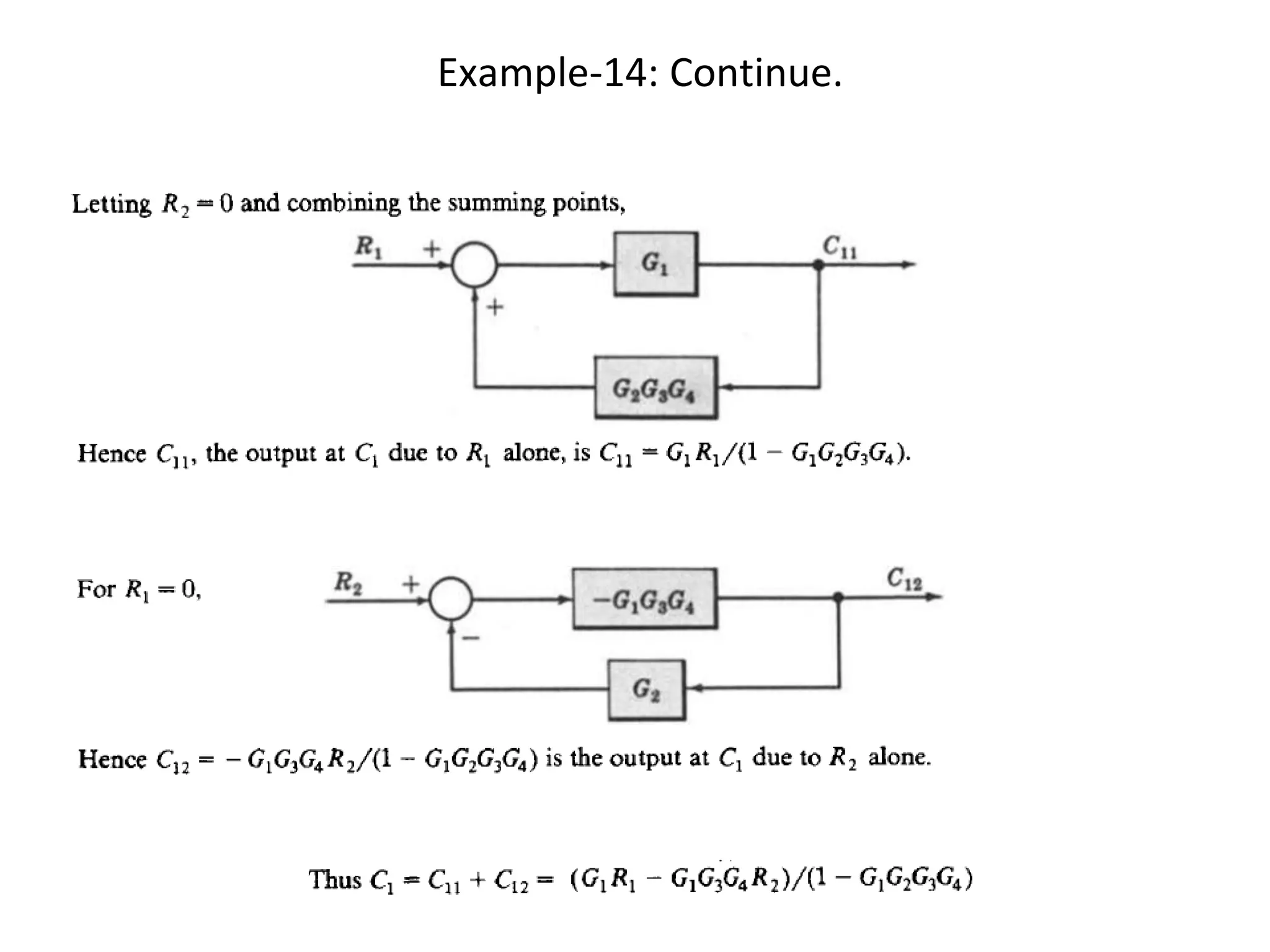
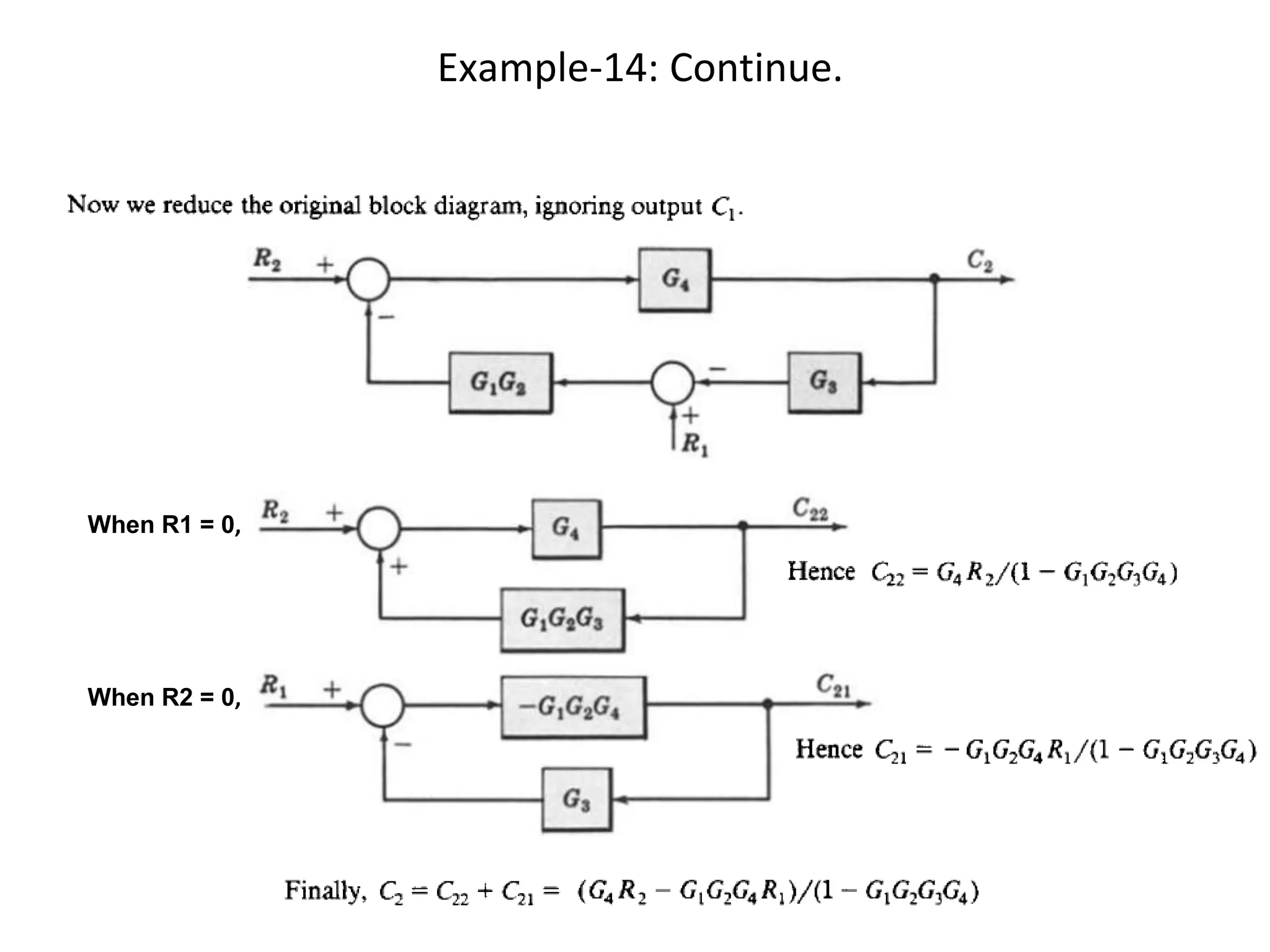
The document discusses block diagram representation of control systems. It begins by explaining that a block diagram provides a pictorial representation of the relationships within a system using blocks and arrows. Blocks represent elements or operations, arrows show the direction of signal flow. Special blocks like summing points are used to represent addition and subtraction. Pickoff points allow a signal to be an input to multiple blocks. Several examples are then provided to demonstrate how to draw block diagrams from equations and reduce complex diagrams to canonical form through techniques like combining or eliminating blocks. The document ends by discussing multi-input systems and using superposition to determine outputs from multiple inputs.