Downloaded 17 times
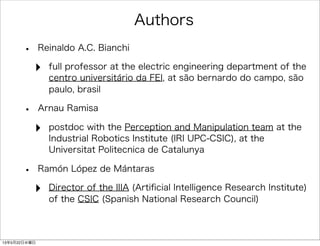
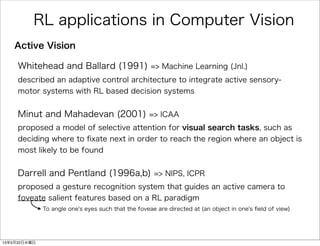
![State
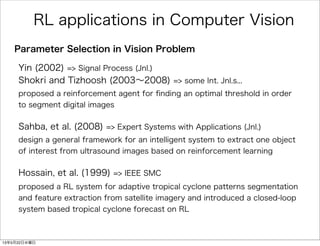
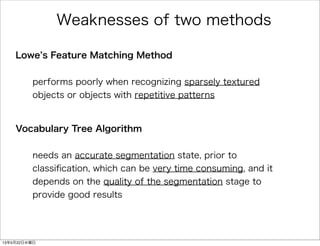
attributes extracted from the images
the possible classification of the image
+
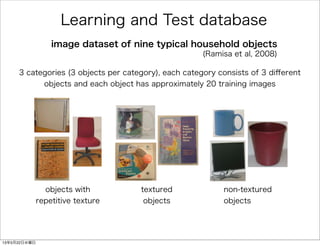
Space state
State definition example in 1st stage
s = [I, , c]
c : class ID
σ: standard deviation of image intensity
I : mean image intensity
13年5月22日水曜日](https://image.slidesharecdn.com/automaticselectionofobjectrecognitionmethodsusingreinforcementlearning-130522060602-phpapp02/85/Automatic-selection-of-object-recognition-methods-using-reinforcement-learning-23-320.jpg)
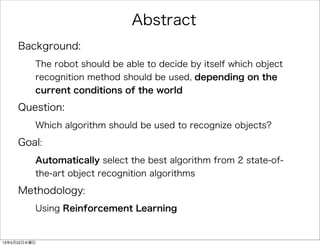
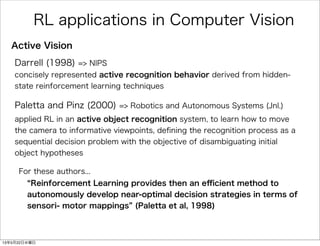
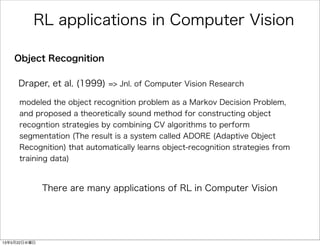
![Action
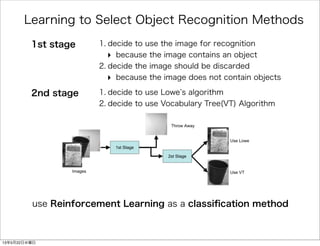
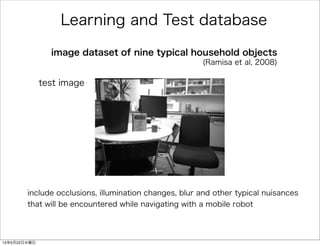
Update action (not real action happening in the world)
Q(s, a)update the value of a state-action pair at one state
using the value of a neighbor pair
Example:
if space state is composed of [ I, σ] (2D)
I
σ
0.1 0.7 1.2 3.1 1.8
0.5 1.1 0.3 2.6 4.1
1.4 2.3 3.2 0.9 2.7
0.7 4.3 2.7 1.4 3.9
3.2 4.6 1.3 1.7 0.7
(after action a)
I
σ
0.1 0.7 1.2 3.1 1.8
0.5 1.1 0.3 2.6 4.1
1.4 2.3 2.3 0.9 2.7
0.7 4.3 2.7 1.4 3.9
3.2 4.6 1.3 1.7 0.7
update action
→action toward space state
Q(s, a) values
13年5月22日水曜日](https://image.slidesharecdn.com/automaticselectionofobjectrecognitionmethodsusingreinforcementlearning-130522060602-phpapp02/85/Automatic-selection-of-object-recognition-methods-using-reinforcement-learning-24-320.jpg)
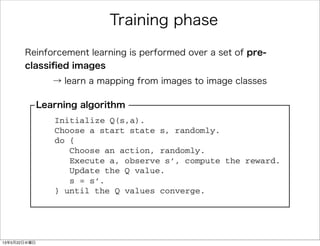
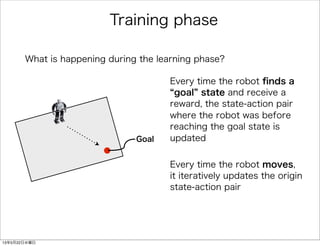
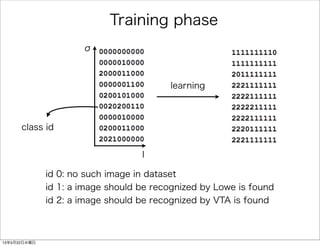
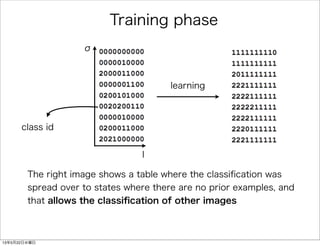
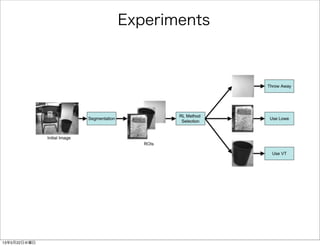
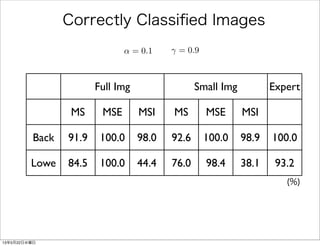
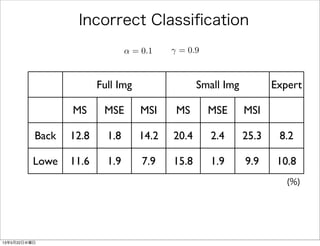

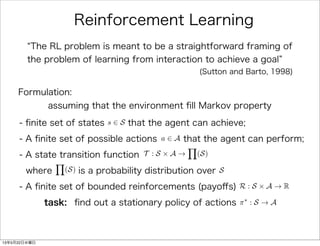
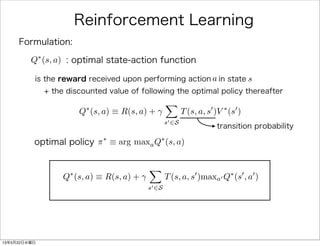
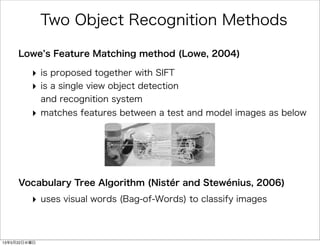
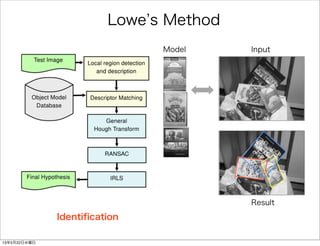
The document discusses using reinforcement learning to automatically select between two object recognition methods. The goal is for a robot to decide which method to use depending on current conditions. It describes using Q-learning to choose between Lowe's feature matching or a vocabulary tree algorithm. State is defined based on image attributes, and actions update the value of state-action pairs to select the best recognition method.




![[5 minutes LT] Brief Introduction to Recent Image Recognition Methods and Cha...](https://cdn.slidesharecdn.com/ss_thumbnails/fashion-tech-2017-06-06-170626055616-thumbnail.jpg?width=640&height=640&fit=bounds)






![[IJET-V1I6P15] Authors : Sadhana Raut, Poonam Rohani,Sumera Shaikh, Tehesin S...](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v1i6p15-160110010824-thumbnail.jpg?width=640&height=640&fit=bounds)









![[DL輪読会]自動運転技術の課題に役立つかもしれない論文3本](https://cdn.slidesharecdn.com/ss_thumbnails/readingpaper20210507-210507031422-thumbnail.jpg?width=640&height=640&fit=bounds)
















![[unofficial] Pyramid Scene Parsing Network (CVPR 2017)](https://cdn.slidesharecdn.com/ss_thumbnails/pyramidsceneparsingnetwork-170815035025-thumbnail.jpg?width=640&height=640&fit=bounds)




























