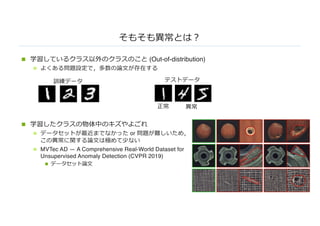
そもそも異常とは︖
n 学習しているクラス以外のクラスのこと (Out-of-distribution)
nよくある問題設定で,多数の論⽂が存在する
n 学習したクラスの物体中のキズやよごれ
n データセットが最近までなかった or 問題が難しいため,
この異常に関する論⽂は極めて少ない
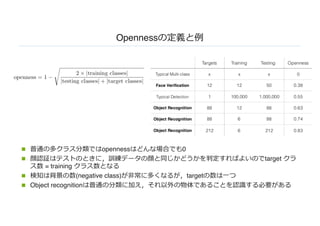
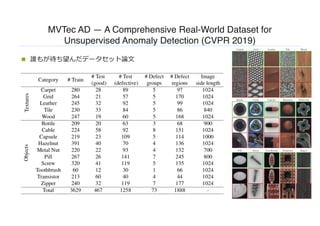
n MVTec AD — A Comprehensive Real-World Dataset for
Unsupervised Anomaly Detection (CVPR 2019)
n データセット論⽂
訓練データ テストデータ
正常 異常
3.
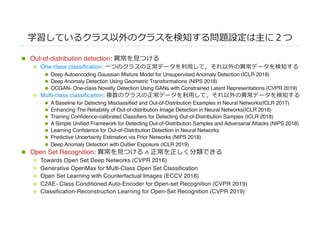
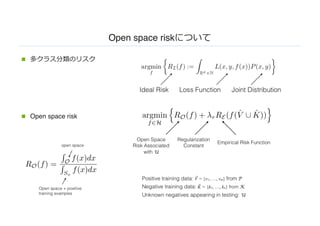
学習しているクラス以外のクラスを検知する問題設定は主に2つ
n Out-of-distribution detection:異常を⾒つける
n One-class classification: ⼀つのクラスの正常データを利⽤して,それ以外の異常データを検知する
n Deep Autoencoding Gaussian Mixture Model for Unsupervised Anomaly Detection (ICLR 2018)
n Deep Anomaly Detection Using Geometric Transformations (NIPS 2018)
n OCGAN- One-class Novelty Detection Using GANs with Constrained Latent Representations (CVPR 2019)
n Multi-class classification: 複数のクラスの正常データを利⽤して,それ以外の異常データを検知する
n A Baseline for Detecting Misclassified and Out-of-Distribution Examples in Neural Networks(ICLR 2017)
n Enhancing The Reliability of Out-of-distribution Image Detection in Neural Networks(ICLR 2018)
n Training Confidence-calibrated Classifiers for Detecting Out-of-Distribution Samples (ICLR 2018)
n A Simple Unified Framework for Detecting Out-of-Distribution Samples and Adversarial Attacks (NIPS 2018)
n Learning Confidence for Out-of-Distribution Detection in Neural Networks
n Predictive Uncertainty Estimation via Prior Networks (NIPS 2018)
n Deep Anomaly Detection with Outlier Exposure (ICLR 2019)
n Open Set Recognition: 異常を⾒つける ∧ 正常を正しく分類できる
n Towards Open Set Deep Networks (CVPR 2016)
n Generative OpenMax for Multi-Class Open Set Classification
n Open Set Learning with Counterfactual Images (ECCV 2018)
n C2AE- Class Conditioned Auto-Encoder for Open-set Recognition (CVPR 2019)
n Classification-Reconstruction Learning for Open-Set Recognition (CVPR 2019)
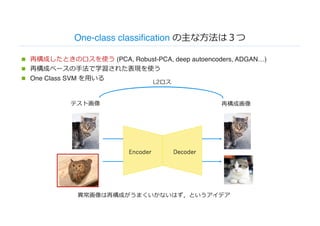
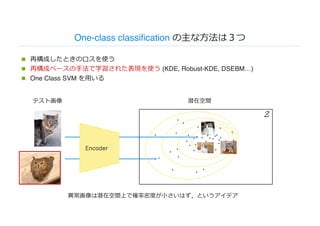
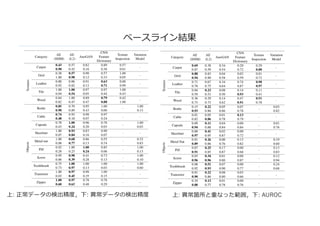
One-class classification の主な⽅法は3つ
n再構成したときのロスを使う (PCA, Robust-PCA, deep autoencoders, ADGAN…)
n 再構成ベースの⼿法で学習された表現を使う
n One Class SVM を⽤いる
異常画像は再構成がうまくいかないはず,というアイデア
再構成画像テスト画像
L2ロス
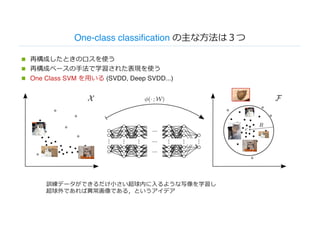
One-class classification の主な⽅法は3つ
n再構成したときのロスを使う
n 再構成ベースの⼿法で学習された表現を使う
n One Class SVM を⽤いる (SVDD, Deep SVDD...)
訓練データができるだけ⼩さい超球内に⼊るような写像を学習し
超球外であれば異常画像である,というアイデア
8.
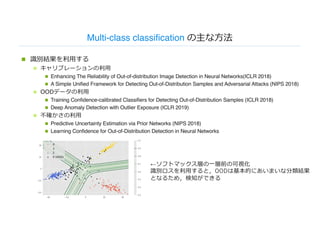
Multi-class classification の主な⽅法
n識別結果を利⽤する
n キャリブレーションの利⽤
n Enhancing The Reliability of Out-of-distribution Image Detection in Neural Networks(ICLR 2018)
n A Simple Unified Framework for Detecting Out-of-Distribution Samples and Adversarial Attacks (NIPS 2018)
n OODデータの利⽤
n Training Confidence-calibrated Classifiers for Detecting Out-of-Distribution Samples (ICLR 2018)
n Deep Anomaly Detection with Outlier Exposure (ICLR 2019)
n 不確かさの利⽤
n Predictive Uncertainty Estimation via Prior Networks (NIPS 2018)
n Learning Confidence for Out-of-Distribution Detection in Neural Networks
←ソフトマックス層の⼀層前の可視化
識別ロスを利⽤すると,OODは基本的にあいまいな分類結果
となるため,検知ができる
9.
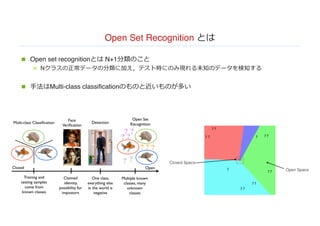
Open Set Recognitionとは
n Open set recognitionとは N+1分類のこと
n Nクラスの正常データの分類に加え,テスト時にのみ現れる未知のデータを検知する
n ⼿法はMulti-class classificationのものと近いものが多い
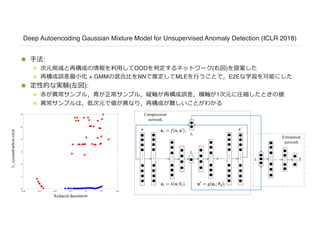
Deep Autoencoding GaussianMixture Model for Unsupervised Anomaly Detection (ICLR 2018)
n ⼿法:
n 次元削減と再構成の情報を利⽤してOODを判定するネットワーク(右図)を提案した
n 再構成誤差最⼩化 + GMMの混合⽐をNNで推定してMLEを⾏うことで,E2Eな学習を可能にした
n 定性的な実験(左図):
n ⾚が異常サンプル,⻘が正常サンプル,縦軸が再構成誤差,横軸が1次元に圧縮したときの値
n 異常サンプルは,低次元で値が異なり,再構成が難しいことがわかる
18.
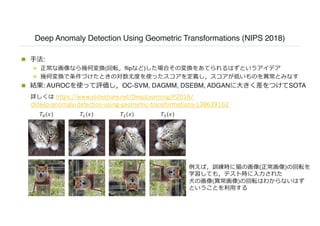
Deep Anomaly DetectionUsing Geometric Transformations (NIPS 2018)
n ⼿法:
n 正常な画像なら幾何変換(回転,flipなど)した場合その変換をあてられるはずというアイデア
n 幾何変換で条件づけたときの対数尤度を使ったスコアを定義し,スコアが低いものを異常とみなす
n 結果: AUROCを使って評価し,OC-SVM, DAGMM, DSEBM, ADGANに⼤きく差をつけてSOTA
𝑇#(𝑥) 𝑇'(𝑥) 𝑇((𝑥) 𝑇)(𝑥)
例えば,訓練時に猫の画像(正常画像)の回転を
学習しても,テスト時に⼊⼒された
⽝の画像(異常画像)の回転はわからないはず
ということを利⽤する
詳しくは https://www.slideshare.net/DeepLearningJP2016/
dldeep-anomaly-detection-using-geometric-transformations-138639162
19.
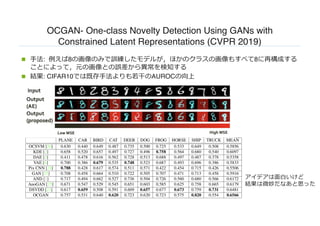
OCGAN- One-class NoveltyDetection Using GANs with
Constrained Latent Representations (CVPR 2019)
n ⼿法: 例えば8の画像のみで訓練したモデルが,ほかのクラスの画像もすべて8に再構成する
ことによって,元の画像との誤差から異常を検知する
n 結果: CIFAR10では既存⼿法よりも若⼲のAUROCの向上
アイデアは⾯⽩いけど
結果は微妙だなあと思った
20.
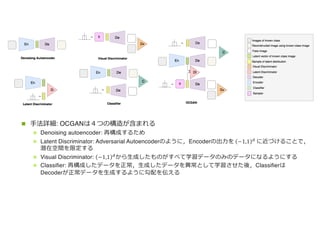
n ⼿法詳細: OCGANは4つの構造が含まれる
nDenoising autoencoder: 再構成するため
n Latent Discriminator: Adversarial Autoencoderのように,Encoderの出⼒を −1,1 -
に近づけることで,
潜在空間を限定する
n Visual Discriminator: −1,1 -
から⽣成したものがすべて学習データのみのデータになるようにする
n Classifier: 再構成したデータを正常,⽣成したデータを異常として学習させた後,Classifierは
Decoderが正常データを⽣成するように勾配を伝える
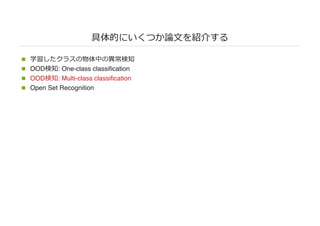
A Baseline forDetecting Misclassified and Out-of-Distribution
Examples in Neural Networks (ICLR 2017)
n 貢献
n multi-class classification分類のときの分布外検出の問題設定を提供し,ベースライン⼿法を提案した
n 提案⼿法: ソフトマックスの出⼒の最⼤値をOODの指標として使う
n アイデア: OODは予測分類が曖昧になるはず
n ex) 3クラスのとき,[0.9, 0.05, 0.05]→正常, [0.3, 0.3, 0.4]→異常
23.
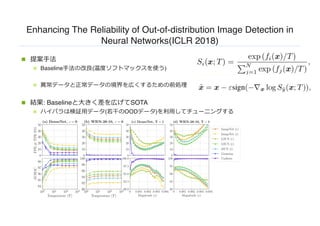
Enhancing The Reliabilityof Out-of-distribution Image Detection in
Neural Networks(ICLR 2018)
n 提案⼿法
n Baseline⼿法の改良(温度ソフトマックスを使う)
n 異常データと正常データの境界を広くするための前処理
n 結果: Baselineと⼤きく差を広げてSOTA
n ハイパラは検証⽤データ(若⼲のOODデータ)を利⽤してチューニングする
24.
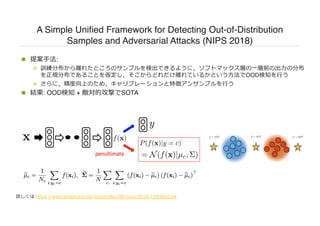
A Simple UnifiedFramework for Detecting Out-of-Distribution
Samples and Adversarial Attacks (NIPS 2018)
n 提案⼿法:
n 訓練分布から離れたところのサンプルを検出できるように,ソフトマックス層の⼀層前の出⼒の分布
を正規分布であることを仮定し,そこからどれだけ離れているかという⽅法でOOD検知を⾏う
n さらに,精度向上のため,キャリブレーションと特徴アンサンブルを⾏う
n 結果: OOD検知 + 敵対的攻撃でSOTA
詳しくは https://www.slideshare.net/ssuser9eb780/nips-2018-139360134
25.
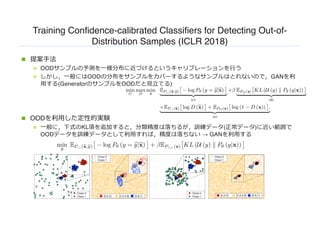
Training Confidence-calibrated Classifiersfor Detecting Out-of-
Distribution Samples (ICLR 2018)
n 提案⼿法
n OODサンプルの予測を⼀様分布に近づけるというキャリブレーションを⾏う
n しかし,⼀般にはOODの分布をサンプルをカバーするようなサンプルはとれないので,GANを利
⽤する(GeneratorのサンプルをOODだと⾒⽴てる)
n OODを利⽤した定性的実験
n ⼀般に,下式のKL項を追加すると,分類精度は落ちるが,訓練データ(正常データ)に近い範囲で
OODデータを訓練データとして利⽤すれば,精度は落ちない → GANを利⽤する
26.
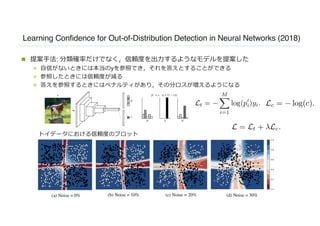
Learning Confidence forOut-of-Distribution Detection in Neural Networks (2018)
n 提案⼿法: 分類確率だけでなく,信頼度を出⼒するようなモデルを提案した
n ⾃信がないときには本当のyを参照でき,それを答えとすることができる
n 参照したときには信頼度が減る
n 答えを参照するときにはペナルティがあり,その分ロスが増えるようになる
トイデータにおける信頼度のプロット
27.
Predictive Uncertainty Estimationvia Prior Networks (NIPS 2018)
n 提案⼿法: 事前分布のパラメータをNNで推定し,以下の(c)のデータを検知するモデルの提案
n (a): 正常データを正しく予測できるとき(confident)
n (b): 正常データだが,どのラベルに属しているかわからないとき(known-unknown)
n (c): 異常データ(unknown-unknown)
詳しくは https://www.slideshare.net/DeepLearningJP2016/
dlestimating-predictive-uncertainty-via-prior-networks
𝑥∗
𝑦∗
𝛼 𝜇
[0, 1, 0][0.05, 0.9, 0.05]
Prior Networks
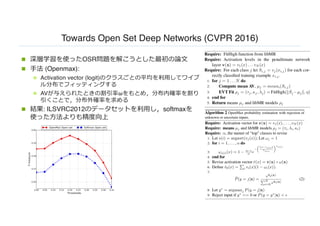
Towards Open SetDeep Networks (CVPR 2016)
n 深層学習を使ったOSR問題を解こうとした最初の論⽂
n ⼿法 (Openmax):
n Activation vector (logit)のクラスごとの平均を利⽤してワイブ
ル分布でフィッティングする
n AVが与えられたときの割引率ωをもとめ,分布内確率を割り
引くことで,分布外確率を求める
n 結果: ILSVRC2012のデータセットを利⽤し,softmaxを
使った⽅法よりも精度向上
30.
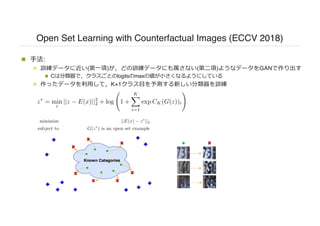
Open Set Learningwith Counterfactual Images (ECCV 2018)
n ⼿法:
n 訓練データに近い(第⼀項)が,どの訓練データにも属さない(第⼆項)ようなデータをGANで作り出す
n Cは分類器で,クラスごとのlogitsのmaxの値が⼩さくなるようにしている
n 作ったデータを利⽤して,K+1クラス⽬を予測する新しい分類器を訓練
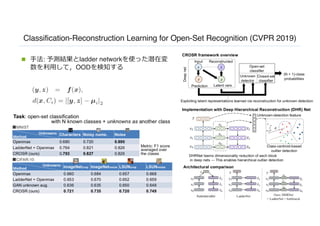
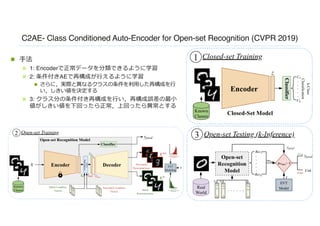
C2AE- Class ConditionedAuto-Encoder for Open-set Recognition (CVPR 2019)
n ⼿法
n 1: Encoderで正常データを分類できるように学習
n 2: 条件付きAEで再構成が⾏えるように学習
n さらに,実際と異なるクラスの条件を利⽤した再構成を⾏
い,しきい値を決定する
n 3: クラス分の条件付き再構成を⾏い,再構成誤差の最⼩
値がしきい値を下回ったら正常,上回ったら異常とする
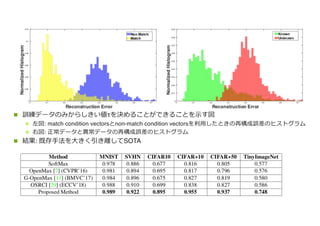
33.
n 訓練データのみからしきい値τを決めることができることを⽰す図
n 左図:match condition vectorsとnon-match condition vectorsを利⽤したときの再構成誤差のヒストグラム
n 右図: 正常データと異常データの再構成誤差のヒストグラム
n 結果: 既存⼿法を⼤きく引き離してSOTA


![A Baseline for Detecting Misclassified and Out-of-Distribution
Examples in Neural Networks (ICLR 2017)
n 貢献
n multi-class classification分類のときの分布外検出の問題設定を提供し,ベースライン⼿法を提案した
n 提案⼿法: ソフトマックスの出⼒の最⼤値をOODの指標として使う
n アイデア: OODは予測分類が曖昧になるはず
n ex) 3クラスのとき,[0.9, 0.05, 0.05]→正常, [0.3, 0.3, 0.4]→異常](https://image.slidesharecdn.com/anomalydetectionsurvey-190811140018/85/Anomaly-detection-22-320.jpg)
![Predictive Uncertainty Estimation via Prior Networks (NIPS 2018)
n 提案⼿法: 事前分布のパラメータをNNで推定し,以下の(c)のデータを検知するモデルの提案
n (a): 正常データを正しく予測できるとき(confident)
n (b): 正常データだが,どのラベルに属しているかわからないとき(known-unknown)
n (c): 異常データ(unknown-unknown)
詳しくは https://www.slideshare.net/DeepLearningJP2016/
dlestimating-predictive-uncertainty-via-prior-networks
𝑥∗
𝑦∗
𝛼 𝜇
[0, 1, 0][0.05, 0.9, 0.05]
Prior Networks](https://image.slidesharecdn.com/anomalydetectionsurvey-190811140018/85/Anomaly-detection-27-320.jpg)

![[DL輪読会]data2vec: A General Framework for Self-supervised Learning in Speech,...](https://cdn.slidesharecdn.com/ss_thumbnails/220204nonakadl1-220204025334-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]ICLR2020の分布外検知速報](https://cdn.slidesharecdn.com/ss_thumbnails/iclr2020ood-190927011524-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets](https://cdn.slidesharecdn.com/ss_thumbnails/20220325okimura-220405024717-thumbnail.jpg?width=640&height=640&fit=bounds)











![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Vision Transformer with Deformable Attention (Deformable Attention Tra...](https://cdn.slidesharecdn.com/ss_thumbnails/dl0114-220114032933-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]GLIDE: Guided Language to Image Diffusion for Generation and Editing](https://cdn.slidesharecdn.com/ss_thumbnails/glide2-220107030326-thumbnail.jpg?width=640&height=640&fit=bounds)




![[GTC2018] 敵対生成学習による外観検査のための異常検知手法 (Ridge-i 発表資料)](https://cdn.slidesharecdn.com/ss_thumbnails/gtc20182-180913022952-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]A Simple Unified Framework for Detecting Out-of-Distribution Samples a...](https://cdn.slidesharecdn.com/ss_thumbnails/20181005misono2-181009052706-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Estimating Predictive Uncertainty via Prior Networks](https://cdn.slidesharecdn.com/ss_thumbnails/estimatingpredictiveuncertaintyviapriornetworks-190628002736-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]AVID:Adversarial Visual Irregularity Detection](https://cdn.slidesharecdn.com/ss_thumbnails/kuboshizuma20180817-180821062351-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]10分で10本の論⽂をざっくりと理解する (ICML2020)](https://cdn.slidesharecdn.com/ss_thumbnails/20200828-ant-200828025358-thumbnail.jpg?width=640&height=640&fit=bounds)














