Downloaded 36 times



































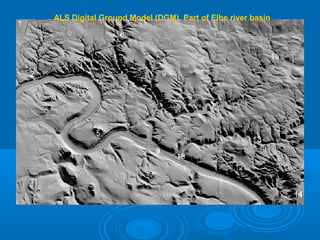























This document discusses airborne laser scanning (ALS) and its applications. It begins by defining ALS and its history. It then describes the key components of a typical ALS system, including a laser, scanner, GPS, IMU, and control units. It discusses how ALS measures distance and collects point cloud data. Application examples are given, such as generating digital terrain models and surface models over large areas. The document also includes a case study on using ALS and high-resolution satellite data to study geomorphic features in parts of the Elbe River valley in Germany.