Downloaded 65 times









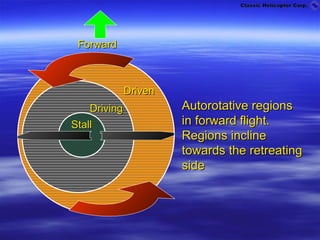




Autorotation is the process by which a helicopter can descend and land without engine power by using the airflow coming up from the ground or air during descent to turn the rotor blades and maintain control. During autorotation, the helicopter trades altitude for the energy required to spin the rotor blades at a speed that provides enough lift to control the aircraft. The pilot lowers the collective to reduce blade drag and tilt the total aerodynamic force vector forward to maintain rotor RPM as the helicopter descends.